Anda mungkin juga menyukai
- Transformasi LinearDokumen11 halamanTransformasi LinearapriliaBelum ada peringkat
- Transformasi LinearDokumen11 halamanTransformasi LinearapriliaBelum ada peringkat
- Pertemuan 12,13Dokumen10 halamanPertemuan 12,13Johan Abisay TambunanBelum ada peringkat
- Materi Transformasi Linear UmumDokumen12 halamanMateri Transformasi Linear UmumDheon AprilioBelum ada peringkat
- TRANSFORMASI LINEARDokumen11 halamanTRANSFORMASI LINEARHafidz NovianasBelum ada peringkat
- Makalah Transformasi Linear3Dokumen6 halamanMakalah Transformasi Linear3Johan Abisay TambunanBelum ada peringkat
- Tansformasi Linier PDFDokumen50 halamanTansformasi Linier PDFNatasha InesBelum ada peringkat
- Kelompok 7 Aljabar Linear Dan MatriksDokumen25 halamanKelompok 7 Aljabar Linear Dan MatriksMuhammad Hanif100% (1)
- Aljabar Linear IIDokumen12 halamanAljabar Linear IIExsanYusannBelum ada peringkat
- TRANSFORMASI LINEARDokumen12 halamanTRANSFORMASI LINEARParningotan situmorangBelum ada peringkat
- 8 4 Dan 8 5 Transformasi Linier UmumDokumen18 halaman8 4 Dan 8 5 Transformasi Linier UmumYusroni NainggolanBelum ada peringkat
- Transformasi LinierDokumen19 halamanTransformasi LinierWisnu EkaBelum ada peringkat
- 15 - Bab 8.1-8.2-8.3Dokumen37 halaman15 - Bab 8.1-8.2-8.3Asal Kamu BahagiaBelum ada peringkat
- TRANSFORMASI LINIERDokumen11 halamanTRANSFORMASI LINIERDelightz ViczBelum ada peringkat
- Aljabar LinierDokumen11 halamanAljabar LinierNiidaBelum ada peringkat
- Transformasi LinierDokumen12 halamanTransformasi LinierZizwatin Athiyah100% (1)
- OPTIMALKAN ALJABAR LINEARDokumen18 halamanOPTIMALKAN ALJABAR LINEARSeptiana AzizahBelum ada peringkat
- (521891159) 09 Transformasi-LinierDokumen12 halaman(521891159) 09 Transformasi-LinierRizalAchdaBelum ada peringkat
- Transformasi LinierDokumen9 halamanTransformasi LinierapriliaBelum ada peringkat
- Aljabar Linier Bab 8Dokumen58 halamanAljabar Linier Bab 8Sarah GitaBelum ada peringkat
- Alin 07 - Transformasi LinearDokumen35 halamanAlin 07 - Transformasi LinearDwi Putri LestariBelum ada peringkat
- TRANSFORMASI LINEARDokumen10 halamanTRANSFORMASI LINEARdoubleulandBelum ada peringkat
- Transformasi LinierDokumen9 halamanTransformasi LinierSuharni SyamBelum ada peringkat
- ALJABARDokumen1 halamanALJABARSupandi OglekBelum ada peringkat
- Makalah AljabarDokumen19 halamanMakalah AljabarSopian Bersama KalianBelum ada peringkat
- Modul-11-Transformasi-LinearDokumen14 halamanModul-11-Transformasi-Linearghina chaerunnisaBelum ada peringkat
- Kernel, Range, Nullity, RankDokumen18 halamanKernel, Range, Nullity, RankPutra Sakera50% (2)
- Kelompok 3Dokumen24 halamanKelompok 3Ary PratiwiBelum ada peringkat
- 8.3 Inverse Linear: TransformationsDokumen38 halaman8.3 Inverse Linear: Transformationsevaniriska21Belum ada peringkat
- 09 Transformasi-LinierDokumen11 halaman09 Transformasi-Linieranon_792103617Belum ada peringkat
- Transformasi Dan Rumus (Klmpok 2)Dokumen8 halamanTransformasi Dan Rumus (Klmpok 2)Putu Liana WardaniBelum ada peringkat
- Nilai Eigen Dan Vector EigenDokumen20 halamanNilai Eigen Dan Vector EigenWisna FlickaBelum ada peringkat
- Transformasi Linear: Matematika 4Dokumen38 halamanTransformasi Linear: Matematika 4046Hilal Luthfi HibatullahBelum ada peringkat
- Transformasi Linier MatriksDokumen27 halamanTransformasi Linier MatriksMuhammad LuthfiBelum ada peringkat
- TRANSFORMASI LINIERDokumen22 halamanTRANSFORMASI LINIERSuci Yati NurillahBelum ada peringkat
- Bab8 Aljabar LinierDokumen13 halamanBab8 Aljabar LinierAdan MohiBelum ada peringkat
- Materi Pertemuan 4 Dan 5Dokumen18 halamanMateri Pertemuan 4 Dan 54C019Gede Wisnu BudipratamaBelum ada peringkat
- Materi TransformasiDokumen14 halamanMateri TransformasiUmi MuhlisahBelum ada peringkat
- 15 - Bab 8.1-8.2Dokumen30 halaman15 - Bab 8.1-8.2Adia Roos FebransyahBelum ada peringkat
- Transformasi Linier dan Matriks TransformasiDokumen6 halamanTransformasi Linier dan Matriks TransformasiArief HidayatBelum ada peringkat
- Makalah Transformasi Linier PDFDokumen29 halamanMakalah Transformasi Linier PDFAhmad Hafidz MahendraBelum ada peringkat
- TRANSFORMASI LINEARDokumen18 halamanTRANSFORMASI LINEARPebriBelum ada peringkat
- GEOMETRI TRANSFORMASIDokumen17 halamanGEOMETRI TRANSFORMASIMuhammad RahmiBelum ada peringkat
- Rangkuman Materi Transformasi Linie1Dokumen5 halamanRangkuman Materi Transformasi Linie1Rizalie Khenshin Sagitariusboy100% (1)
- KLP 2 Alin - Kernel Dan JangkauanDokumen17 halamanKLP 2 Alin - Kernel Dan JangkauanAzkiaur rafiqaBelum ada peringkat
- MATRIKS TRANSFORMASIDokumen16 halamanMATRIKS TRANSFORMASINur Zakyah GazaliBelum ada peringkat
- Transformasi Linier PDFDokumen41 halamanTransformasi Linier PDFChristian JeremiaBelum ada peringkat
- 237Dokumen1 halaman237Meida AnandaBelum ada peringkat
- Transformasi LaplaceDokumen32 halamanTransformasi LaplaceGilbert TampubolonBelum ada peringkat
- TRANSFORMASI LINIERDokumen22 halamanTRANSFORMASI LINIERAida YuliantiBelum ada peringkat
- BAB III Tranformasi LaplaceDokumen39 halamanBAB III Tranformasi LaplaceWidi ApriliaBelum ada peringkat
- Transformasi Linear dan MatriksDokumen7 halamanTransformasi Linear dan MatriksRedixon SimbolonBelum ada peringkat
- Sub-Bab 13-5 Kelengkungan Dan PercepatanDokumen6 halamanSub-Bab 13-5 Kelengkungan Dan PercepatanGinanjar Hadi SukmaBelum ada peringkat
- ALJABAR LINEAR TRANSFORMASIDokumen14 halamanALJABAR LINEAR TRANSFORMASIEden HasanBelum ada peringkat
- Aljabar Linear TugasDokumen20 halamanAljabar Linear TugasSyelly Putri Apriliani Sr.Belum ada peringkat
- CBR Aljabar Linier DasarDokumen17 halamanCBR Aljabar Linier DasarVida DachiBelum ada peringkat
- Makalah MatriksDokumen11 halamanMakalah MatriksJepri Hans PetrusBelum ada peringkat
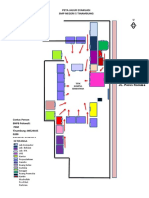
- Peta Jalur Evakuasi SMP Negeri 5 TinambungDokumen2 halamanPeta Jalur Evakuasi SMP Negeri 5 TinambungEsahdanu ThandBelum ada peringkat
- Li SMP 2020Dokumen9 halamanLi SMP 2020Esahdanu ThandBelum ada peringkat
- Lomba Upacara Bendera Kelas 2022Dokumen4 halamanLomba Upacara Bendera Kelas 2022Esahdanu ThandBelum ada peringkat
- Bagian Belakang SertifikatDokumen1 halamanBagian Belakang SertifikatEsahdanu ThandBelum ada peringkat
- 6koordinat Polar Dan Bilangan Kompleks2Dokumen15 halaman6koordinat Polar Dan Bilangan Kompleks2Esahdanu ThandBelum ada peringkat
- Dokumen Konferensi Kerja IDokumen26 halamanDokumen Konferensi Kerja IEsahdanu ThandBelum ada peringkat
- 6koordinat Polar Dan Bilangan Kompleks3Dokumen21 halaman6koordinat Polar Dan Bilangan Kompleks3Esahdanu ThandBelum ada peringkat
- Contoh SK Pengangkatan Guru Honorer - Docx - Google DokumenDokumen3 halamanContoh SK Pengangkatan Guru Honorer - Docx - Google DokumenEsahdanu ThandBelum ada peringkat
- Share Sesi 13. Peta Risiko Bencana Di SekolahDokumen20 halamanShare Sesi 13. Peta Risiko Bencana Di SekolahEsahdanu ThandBelum ada peringkat
- ATT05 Mpandes Contingency PlanDokumen30 halamanATT05 Mpandes Contingency PlanAmaqn FawwaazBelum ada peringkat
- Salinan Share Sesi 4-12. Kajian RisikoDokumen35 halamanSalinan Share Sesi 4-12. Kajian RisikoEsahdanu ThandBelum ada peringkat
- Kebijakan SPAB Di IndonesiaDokumen57 halamanKebijakan SPAB Di IndonesiaEsahdanu ThandBelum ada peringkat
- Bagian 2. Pengenalan SPABDokumen13 halamanBagian 2. Pengenalan SPABEsahdanu ThandBelum ada peringkat
- Bagian 13.tim Siaga SekolahDokumen9 halamanBagian 13.tim Siaga SekolahEsahdanu ThandBelum ada peringkat