Anda mungkin juga menyukai
- BoltDokumen8 halamanBoltBalikpapan CityBelum ada peringkat
- Periodic Service Zona 1Dokumen12 halamanPeriodic Service Zona 1Henda PradikaBelum ada peringkat
- JSA 009 - Bongkar Pasang UndercarriageDokumen9 halamanJSA 009 - Bongkar Pasang Undercarriagehima humaBelum ada peringkat
- JSA Assembling Recoil Spring D375A-5Dokumen2 halamanJSA Assembling Recoil Spring D375A-5Wanda Panggih KurniawanBelum ada peringkat
- JSA Service Engine HD1500-7 & PC4000-6Dokumen4 halamanJSA Service Engine HD1500-7 & PC4000-6Nurha DihaBelum ada peringkat
- 0009.JSEA - HE.PLT.2015 Replace Cutting Edge End Bit DozerDokumen2 halaman0009.JSEA - HE.PLT.2015 Replace Cutting Edge End Bit Dozerirwan yuniardiBelum ada peringkat
- Gd14m-12 Jsa Melepas Dan Memasang Blade Tip Cylinder Grader 14mDokumen4 halamanGd14m-12 Jsa Melepas Dan Memasang Blade Tip Cylinder Grader 14mMyMusic 41Belum ada peringkat
- GD14M-11 JSA MELEPAS DAN MEMASANG Blade Sideshift Cyl GRADER 14MDokumen4 halamanGD14M-11 JSA MELEPAS DAN MEMASANG Blade Sideshift Cyl GRADER 14MMyMusic 41Belum ada peringkat
- BMC ToolsDokumen11 halamanBMC ToolsTeknik OtomotifBelum ada peringkat
- 01 Jsa Pekerjaan Bongkar MaterialDokumen6 halaman01 Jsa Pekerjaan Bongkar MaterialRizky LssBelum ada peringkat
- Kajian Teknis Stand JackDokumen5 halamanKajian Teknis Stand Jackyusril sabriBelum ada peringkat
- Jsa Pelatihan Di Kelas RevitaDokumen1 halamanJsa Pelatihan Di Kelas Revitanur rasyidah100% (1)
- Buku Pedoman PengoperasianDokumen141 halamanBuku Pedoman PengoperasianJonathan ViccoBelum ada peringkat
- JSA Mengelas PontonDokumen3 halamanJSA Mengelas Pontonmuhammad marsanBelum ada peringkat
- Mempelajari Tentang Alat-Alat Berat Dan Ilmu Yang Berkaitan Dengan Otomotif: Bulldozer Komatsu D375A-6Dokumen4 halamanMempelajari Tentang Alat-Alat Berat Dan Ilmu Yang Berkaitan Dengan Otomotif: Bulldozer Komatsu D375A-6Ainun AminBelum ada peringkat
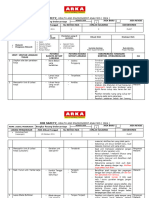
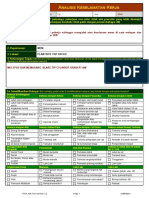
- Form Job Safety Analysis: No Urutan Aktivitas Potensi Bahaya Tindakan Pengendalian Penanggung JawabDokumen4 halamanForm Job Safety Analysis: No Urutan Aktivitas Potensi Bahaya Tindakan Pengendalian Penanggung JawabEiger Area Batulicin100% (1)
- Jsa 033 Painting UnitDokumen8 halamanJsa 033 Painting UnitDimas AdityoBelum ada peringkat
- Berau Coal Green Mining System Formulir: Job Safety AnalysisDokumen1 halamanBerau Coal Green Mining System Formulir: Job Safety AnalysisBatubara SekarangBelum ada peringkat
- Cylinder HeadDokumen26 halamanCylinder HeadPasamanjuntakBelum ada peringkat
- JSEA-DT-0004-PLT-2016 Replace Joint PTODokumen2 halamanJSEA-DT-0004-PLT-2016 Replace Joint PTOirwan yuniardiBelum ada peringkat
- Truck Suspension SystemDokumen7 halamanTruck Suspension Systemal-if100% (2)
- Safety Relay - Mekanik Alat BeratDokumen6 halamanSafety Relay - Mekanik Alat BeratLuckyfourth KosongtujuhtujuhBelum ada peringkat
- Tools Asesmen Motor Grader - OprDokumen7 halamanTools Asesmen Motor Grader - OprEndang WahyudiBelum ada peringkat
- JSA Pengelasan Bucket Excavator Dengan Mesin Las ListrikDokumen2 halamanJSA Pengelasan Bucket Excavator Dengan Mesin Las Listrikmuhammad marsanBelum ada peringkat
- E - JSA Pengelasan Lock Tip Bucket Excavator Dengan Las Acetylene Dan Las Listrik - MasterDokumen4 halamanE - JSA Pengelasan Lock Tip Bucket Excavator Dengan Las Acetylene Dan Las Listrik - MasterMuhammad Nur RizkiBelum ada peringkat
- 6.JSA Pengelasan GerindaDokumen2 halaman6.JSA Pengelasan GerindaRidwan Riga100% (1)
- Ikabar Pjo SoegengDokumen2 halamanIkabar Pjo SoegengAndreas T Destanio100% (1)
- JSEA-DT-0002-PLT-2016 Repair Cylinder DumpDokumen2 halamanJSEA-DT-0002-PLT-2016 Repair Cylinder Dumpirwan yuniardiBelum ada peringkat
- P2H Fuel TruckDokumen1 halamanP2H Fuel Truckrandi saimonaBelum ada peringkat
- Service Sheet Terex TR60 250 HoursDokumen9 halamanService Sheet Terex TR60 250 Hoursirwan yuniardiBelum ada peringkat
- Form Inspeksi ExcavatorDokumen10 halamanForm Inspeksi ExcavatorNicolas Robin100% (1)
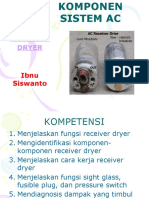
- Receiver DryerDokumen7 halamanReceiver DryerRossi Adhan BuwanaBelum ada peringkat
- Sop Overhaul Wet and GM-250Dokumen4 halamanSop Overhaul Wet and GM-250Jung haeinBelum ada peringkat
- 1.1.19 Jsa Ipr Re-Seal Track Adjuster PC1250Dokumen4 halaman1.1.19 Jsa Ipr Re-Seal Track Adjuster PC1250Eka AnwarBelum ada peringkat
- Tools Asesmen Siswa Magang Excavator Digger - OprDokumen8 halamanTools Asesmen Siswa Magang Excavator Digger - OprEndang WahyudiBelum ada peringkat
- Full Body Harness - IMECODokumen17 halamanFull Body Harness - IMECOOky AdillaBelum ada peringkat
- JSA Service TruckDokumen3 halamanJSA Service TruckWijdan MunierBelum ada peringkat
- SOP - Bongkar Pasang Pin BucketDokumen3 halamanSOP - Bongkar Pasang Pin Bucketgiso juniorBelum ada peringkat
- Mengoperasikan DozerDokumen13 halamanMengoperasikan DozerMulya Bayu BangsawanBelum ada peringkat
- JSA PLANT 09. Greasing Alat BeratDokumen3 halamanJSA PLANT 09. Greasing Alat BeratRahmat FadelBelum ada peringkat
- 05.enginer Eletric MTC Job DeskDokumen5 halaman05.enginer Eletric MTC Job DeskReza SyailendraBelum ada peringkat
- Inspection Sheet UNTUK ExcavatorDokumen22 halamanInspection Sheet UNTUK ExcavatorkkmechBelum ada peringkat
- Pelaksanaan Periodic Inspection Unit D85ESSDokumen3 halamanPelaksanaan Periodic Inspection Unit D85ESSdidi setiawanBelum ada peringkat
- Green CardDokumen1 halamanGreen CardBima AditamaBelum ada peringkat
- SOP - Bongkar Pasang Stick Boom ExcavatorDokumen5 halamanSOP - Bongkar Pasang Stick Boom Excavatorgiso juniorBelum ada peringkat
- Jsa Penggantian BanDokumen4 halamanJsa Penggantian Ban39Puteri Asha NabilaBelum ada peringkat
- Tugas (Ball Screw Dan Linear Ball Bearing)Dokumen13 halamanTugas (Ball Screw Dan Linear Ball Bearing)permanaallanBelum ada peringkat
- HER2-003, Melepas Dan Memasang Brake Chamber (Ok)Dokumen9 halamanHER2-003, Melepas Dan Memasang Brake Chamber (Ok)MyMusic 41Belum ada peringkat
- R&I Steering Pump HD465-7Dokumen7 halamanR&I Steering Pump HD465-7Yusfian TurnerBelum ada peringkat
- Qa4 HD465-7 - Brake Accumulator (1662)Dokumen1 halamanQa4 HD465-7 - Brake Accumulator (1662)Awang Agus SetiawanBelum ada peringkat
- Motorgrader 121123073520 Phpapp01Dokumen7 halamanMotorgrader 121123073520 Phpapp01AgungBudiawanBelum ada peringkat
- Penggantian Cuting Edge Dan End Bit D85Dokumen3 halamanPenggantian Cuting Edge Dan End Bit D85didi setiawan100% (1)
- Jenis Power Steering MobilDokumen28 halamanJenis Power Steering MobilAnggoro BernardiBelum ada peringkat
- Pada Area Pekerjaan Pemasangan Pipa: Job Safety Analysis (Jsa)Dokumen135 halamanPada Area Pekerjaan Pemasangan Pipa: Job Safety Analysis (Jsa)Ariantika Eka PuspitasariBelum ada peringkat
- Jawaban Soal Perawatan Alat Berat 02 Rendy KustiantoDokumen4 halamanJawaban Soal Perawatan Alat Berat 02 Rendy Kustiantoponidi poyBelum ada peringkat
- 2) Basic MaintenanceDokumen18 halaman2) Basic MaintenancesaepulBelum ada peringkat
- Safety Test - 2Dokumen7 halamanSafety Test - 2Su mantoBelum ada peringkat
- 1.1.30 Jsa Ipr Melepas Dan Memasang Idler PC1250Dokumen8 halaman1.1.30 Jsa Ipr Melepas Dan Memasang Idler PC1250Eka AnwarBelum ada peringkat
- AKTUATORDokumen33 halamanAKTUATORanggerBelum ada peringkat
- Chapter 7. Aksi Pengontrolan (Bagian 3)Dokumen12 halamanChapter 7. Aksi Pengontrolan (Bagian 3)Sarah Oktariani NurBelum ada peringkat
- Surat SuratDokumen419 halamanSurat SuratNadiaIssabellaBelum ada peringkat
- Jbptppolban GDL Egayogaerl 3674 3 Bab2 2Dokumen19 halamanJbptppolban GDL Egayogaerl 3674 3 Bab2 2Taufik AlmorBelum ada peringkat
- Karya TulisDokumen21 halamanKarya Tulistihow chanel100% (1)
- Transformator PDFDokumen19 halamanTransformator PDFRinaldiFirdausBelum ada peringkat
- Peralatan SCADA Sistem Tenaga Listrik Rev-52Dokumen71 halamanPeralatan SCADA Sistem Tenaga Listrik Rev-52Arief Chandra II100% (3)
- Base Operational Rasbian On Mini Computer Day 1Dokumen9 halamanBase Operational Rasbian On Mini Computer Day 1tihow chanelBelum ada peringkat
- Sistem Bilangan Bertanda (Signed Integer) Magnitude and One and Two ComplementDokumen30 halamanSistem Bilangan Bertanda (Signed Integer) Magnitude and One and Two Complementtihow chanelBelum ada peringkat
- ABB Medium-Voltage Surge Arresters - Application Guidelines 1HC0075561 E2 AC (Read View) .En - IdDokumen60 halamanABB Medium-Voltage Surge Arresters - Application Guidelines 1HC0075561 E2 AC (Read View) .En - Idtihow chanelBelum ada peringkat
- Bab 3Dokumen14 halamanBab 3tihow chanelBelum ada peringkat
- Bab 1 Sistematika Penulisan Wajib PrintDokumen1 halamanBab 1 Sistematika Penulisan Wajib Printtihow chanelBelum ada peringkat
- Bab IV Wajib Print Hal 25-26Dokumen2 halamanBab IV Wajib Print Hal 25-26tihow chanelBelum ada peringkat
- Bab 1 Sistematika Penulisan Wajib PrintDokumen1 halamanBab 1 Sistematika Penulisan Wajib Printtihow chanelBelum ada peringkat
- Listrik Aliran Atas 6kvDokumen40 halamanListrik Aliran Atas 6kvtihow chanelBelum ada peringkat
- KaiDokumen82 halamanKaiMuhammad MalikiBelum ada peringkat
- Bab IiDokumen7 halamanBab Iitihow chanelBelum ada peringkat
- WhiteLunauCarrasco 2013.inDokumen15 halamanWhiteLunauCarrasco 2013.intihow chanelBelum ada peringkat
- Balai Yasa PDFDokumen45 halamanBalai Yasa PDFMirna PtriBelum ada peringkat