Anda mungkin juga menyukai
- Kestabilan - TKA - PIDDokumen77 halamanKestabilan - TKA - PIDazelBelum ada peringkat
- KestabilanDokumen11 halamanKestabilanmuhammad ridha fauziBelum ada peringkat
- Analisis Kestabilan SistemDokumen18 halamanAnalisis Kestabilan Sistemfadilla putriBelum ada peringkat
- Analisis Kestabilan SistemDokumen8 halamanAnalisis Kestabilan SistemBagusElokBelum ada peringkat
- Kestabilan SistemDokumen8 halamanKestabilan SistemFauzan Masdia PutraBelum ada peringkat
- Analisis Kestabilan SistemDokumen18 halamanAnalisis Kestabilan SistemFirman FirjatullahBelum ada peringkat
- Pertemuan 9 - Kestabilan SistemDokumen11 halamanPertemuan 9 - Kestabilan SistemYasir RyaldiBelum ada peringkat
- Deret Tak Hingga - Polnep - RamliDokumen1 halamanDeret Tak Hingga - Polnep - RamliIrfanda AnugerahBelum ada peringkat
- Tugas PK RobertDokumen10 halamanTugas PK RobertmuhidBelum ada peringkat
- PembahasanDokumen7 halamanPembahasanGrace SimarmataBelum ada peringkat
- Barisan TakberhinggaDokumen9 halamanBarisan TakberhinggaBasar MoonicBelum ada peringkat
- Baris Dan Deret GeometriDokumen6 halamanBaris Dan Deret GeometriPrasetya Adika PutraBelum ada peringkat
- Tekatur Modul DesainDokumen14 halamanTekatur Modul Desainrangga bimaBelum ada peringkat
- 2.1. Persamaan KarakteristikDokumen24 halaman2.1. Persamaan KarakteristikmuhidBelum ada peringkat
- Baris & DeretDokumen12 halamanBaris & DeretnahrulitaBelum ada peringkat
- 3.5 Analisa Kestabilan RouthDokumen20 halaman3.5 Analisa Kestabilan RouthtegararieBelum ada peringkat
- SOAL UAS Statistik 2020 PDFDokumen3 halamanSOAL UAS Statistik 2020 PDFSiti FatimahBelum ada peringkat
- Materi 5. Barisan Dan Deret-1Dokumen42 halamanMateri 5. Barisan Dan Deret-1Yudha PranataBelum ada peringkat
- Kurva Fitting KuliahDokumen33 halamanKurva Fitting KuliahTayuya Kurama MizukyBelum ada peringkat
- Kuis#2 Sisken DikonversiDokumen2 halamanKuis#2 Sisken DikonversiHafid TriansyahBelum ada peringkat
- Metode Dua FasaDokumen17 halamanMetode Dua Fasayunus fairvryBelum ada peringkat
- Analisis KorelasiDokumen3 halamanAnalisis KorelasiKris MiraBelum ada peringkat
- Simpleks 1 &2Dokumen21 halamanSimpleks 1 &2YusmanidarBelum ada peringkat
- Sistem Kontrol 9Dokumen6 halamanSistem Kontrol 9RICKY DIAMONDBelum ada peringkat
- Matika TIDokumen4 halamanMatika TISupriyadi AgusBelum ada peringkat
- Baris Dan Deret GeometriDokumen7 halamanBaris Dan Deret GeometriHilda IndriyaniiBelum ada peringkat
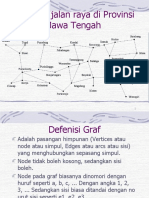
- Teori Graf-Part2Dokumen21 halamanTeori Graf-Part2One Valdo Nathaniel RembetBelum ada peringkat
- 8 Modul 8Dokumen5 halaman8 Modul 8Fafa SpamBelum ada peringkat
- Fundamentals-Analisis-Dan-Efisiensi-Algoritma-Non-Rekursif - DAA - KM - v4.04Dokumen65 halamanFundamentals-Analisis-Dan-Efisiensi-Algoritma-Non-Rekursif - DAA - KM - v4.04Gerobak MieBelum ada peringkat
- 3.4 Karakteristik Sistem Orde Tinggi PDFDokumen21 halaman3.4 Karakteristik Sistem Orde Tinggi PDFESTER CAROLINABelum ada peringkat
- Bab II DeterminanDokumen38 halamanBab II DeterminanMuhammad Irfani Fahrezi RBelum ada peringkat
- Madis Modul2 Bag 2-BinomialDokumen19 halamanMadis Modul2 Bag 2-BinomialyusnandaBelum ada peringkat
- AL Modul 1 Matrik Dan Determinan 1Dokumen19 halamanAL Modul 1 Matrik Dan Determinan 1ArifRahmanBelum ada peringkat
- Contoh Soal Pencocokan Kurva Metode RegresiDokumen21 halamanContoh Soal Pencocokan Kurva Metode RegresiDiki0% (1)
- 1DISKRET D3 KombinatorikaDokumen8 halaman1DISKRET D3 KombinatorikaDimas PutraBelum ada peringkat
- Least Square Metode Numerik Statistika UnairDokumen11 halamanLeast Square Metode Numerik Statistika UnairNabila RasyidahBelum ada peringkat
- Bahan Ajar - NUR ASIH - Matematika - 19120518010166 PDFDokumen22 halamanBahan Ajar - NUR ASIH - Matematika - 19120518010166 PDFApriyani EkayantiBelum ada peringkat
- Makalah Uji Korelasi PeringkatDokumen6 halamanMakalah Uji Korelasi PeringkatNaufal FadhilaBelum ada peringkat
- Bank Soal 2018Dokumen43 halamanBank Soal 2018Nur AzizahBelum ada peringkat
- Tugas 1 M.Teknik - 2112063 - Rifqi TaufiqurDokumen27 halamanTugas 1 M.Teknik - 2112063 - Rifqi TaufiqurRizqi Cahyo M PutraBelum ada peringkat
- PERTEMUAN 12 Ruang Baris, Ruang Kolom, Ruang Nul, Rank Dan NulitasDokumen4 halamanPERTEMUAN 12 Ruang Baris, Ruang Kolom, Ruang Nul, Rank Dan NulitasSalsa DillaBelum ada peringkat
- Operasi Matriks-LSDDokumen11 halamanOperasi Matriks-LSDmochammad adityaBelum ada peringkat
- 6 - Kestabilan SistemDokumen19 halaman6 - Kestabilan SistemQiura Sahati0% (1)
- Deret Tak HinggaDokumen30 halamanDeret Tak HinggaelsieBelum ada peringkat
- Kestabilan SistemDokumen15 halamanKestabilan SistemMiie EmiieBelum ada peringkat
- Trigonometri IIDokumen1 halamanTrigonometri IIRinanti AstariBelum ada peringkat
- ZZZZZZZDokumen12 halamanZZZZZZZChenaniah ChenaniahBelum ada peringkat
- Materi 5. Barisan Dan DeretDokumen42 halamanMateri 5. Barisan Dan DeretRezaFahrezaBelum ada peringkat
- Solusi #6Dokumen5 halamanSolusi #6Elektro C'18 UnjaniBelum ada peringkat
- Kuliah Metnum Wa 4 Analisis RegresiDokumen21 halamanKuliah Metnum Wa 4 Analisis RegresiJonathan KakombohiBelum ada peringkat
- Ma TriksDokumen23 halamanMa Trikskurikulum smadiponegoro2Belum ada peringkat
- Rancangan Bujur Sangkar LatinDokumen29 halamanRancangan Bujur Sangkar LatinSaptadi AgungBelum ada peringkat
- 10 Image Enhancement Bagian2Dokumen66 halaman10 Image Enhancement Bagian2Putu Kocet ArdanaBelum ada peringkat
- Tugas MatlabDokumen19 halamanTugas MatlabTetty ZeptianichBelum ada peringkat
- KESTABILAN SISTEM Lanjutan111Dokumen14 halamanKESTABILAN SISTEM Lanjutan111Cipta DanaBelum ada peringkat
- Angka JamDokumen12 halamanAngka Jam0926Alifia AmbarwatiBelum ada peringkat
- Slide INF201 GrafDokumen40 halamanSlide INF201 GrafPipit FitrianiBelum ada peringkat
- Modul 6 Deret Geometri Tak HinggaDokumen9 halamanModul 6 Deret Geometri Tak HinggaMuhammad Kevin almerBelum ada peringkat
- Barisan Dan Deret GeometriDokumen8 halamanBarisan Dan Deret Geometriwulan febriBelum ada peringkat
- Percobaan I - Penggunaan Alat Ukur DasarDokumen1 halamanPercobaan I - Penggunaan Alat Ukur DasarKarina IndrianiBelum ada peringkat
- AbstrakDokumen1 halamanAbstrakKarina IndrianiBelum ada peringkat
- Metode PenelitianDokumen12 halamanMetode PenelitianKarina IndrianiBelum ada peringkat
- Gaya ANTARMOLEKULDokumen6 halamanGaya ANTARMOLEKULKarina IndrianiBelum ada peringkat
- Amaliah Pmii AnnahdliahDokumen14 halamanAmaliah Pmii AnnahdliahKarina IndrianiBelum ada peringkat
- Bab3b. Diagram BlokDokumen18 halamanBab3b. Diagram BlokKarina IndrianiBelum ada peringkat
- FismodDokumen18 halamanFismodKarina IndrianiBelum ada peringkat
- Summary Metode NumerikDokumen3 halamanSummary Metode NumerikKarina IndrianiBelum ada peringkat
- 2021-Modul Prakt Eksperimen 1Dokumen30 halaman2021-Modul Prakt Eksperimen 1Karina IndrianiBelum ada peringkat
- Karina Indriani - 1911014220005 - Kelompok 3 (Tugas Revitalisasi Peran MahasiswaDokumen2 halamanKarina Indriani - 1911014220005 - Kelompok 3 (Tugas Revitalisasi Peran MahasiswaKarina IndrianiBelum ada peringkat
- 6286 1 10408 1 10 20130902Dokumen7 halaman6286 1 10408 1 10 20130902Retno Putri LestariBelum ada peringkat
- Garis Eksperimen 1Dokumen1 halamanGaris Eksperimen 1Karina IndrianiBelum ada peringkat
- Karina Indriani - 1911014220005 - Fisika Inti (NMR)Dokumen10 halamanKarina Indriani - 1911014220005 - Fisika Inti (NMR)Karina IndrianiBelum ada peringkat
- Karina Indriani - 1911014220005 - Kelompok 3 (Tugas Revitalisasi Peran MahasiswaDokumen2 halamanKarina Indriani - 1911014220005 - Kelompok 3 (Tugas Revitalisasi Peran MahasiswaKarina IndrianiBelum ada peringkat
- Kelompok 2 B .IndoDokumen23 halamanKelompok 2 B .IndoKarina IndrianiBelum ada peringkat
- Karina Indriani - 1911014220005 - Kelompok 3 (Tugas Materi 3)Dokumen1 halamanKarina Indriani - 1911014220005 - Kelompok 3 (Tugas Materi 3)Karina IndrianiBelum ada peringkat
- Molekul Sebagai Penyusun Zat PadatDokumen24 halamanMolekul Sebagai Penyusun Zat PadatKarina IndrianiBelum ada peringkat
- Dasar Fisika KuantumDokumen25 halamanDasar Fisika KuantumKarina IndrianiBelum ada peringkat
- Biologi GenetikaDokumen5 halamanBiologi GenetikaKarina IndrianiBelum ada peringkat
- Kuliah Bioumum 1Dokumen52 halamanKuliah Bioumum 1Karina IndrianiBelum ada peringkat
- Soal UTS-Daring-FD3-23032020Dokumen2 halamanSoal UTS-Daring-FD3-23032020Karina IndrianiBelum ada peringkat
- Hubungan Fisika Dan BiologiDokumen2 halamanHubungan Fisika Dan BiologiKarina Indriani100% (1)
- Bisnis Model KanvasDokumen1 halamanBisnis Model KanvasKarina IndrianiBelum ada peringkat
- Kelompok 5. X MiaDokumen25 halamanKelompok 5. X MiaKarina IndrianiBelum ada peringkat
- Tragedi Anak DurhakaDokumen9 halamanTragedi Anak DurhakaKarina IndrianiBelum ada peringkat
- Kebijakan MoneterDokumen3 halamanKebijakan MoneterKarina IndrianiBelum ada peringkat
- Laporan PraktikumDokumen7 halamanLaporan PraktikumKarina IndrianiBelum ada peringkat
- Tugas BiologiDokumen2 halamanTugas BiologiKarina IndrianiBelum ada peringkat
- Resep Bolu Jatuh BangunDokumen6 halamanResep Bolu Jatuh BangunKarina Indriani100% (1)