Anda mungkin juga menyukai
- Fasor, Impedansi, Dan Kaidah RangkaianDokumen24 halamanFasor, Impedansi, Dan Kaidah Rangkaianfadhlurrahman hilmiBelum ada peringkat
- Pengolahan CitraDokumen2 halamanPengolahan CitraZiy CulunBelum ada peringkat
- Konversi Bilangan: Sasaran BelajarDokumen16 halamanKonversi Bilangan: Sasaran Belajardzul hidayatBelum ada peringkat
- Distribusi Peluang Diskret PDFDokumen12 halamanDistribusi Peluang Diskret PDFAhmad Sadam SyaeroziBelum ada peringkat
- Laporan4 09011281924065Dokumen6 halamanLaporan4 09011281924065Warga DesaBelum ada peringkat
- Catatan Papa Ginting 5Dokumen8 halamanCatatan Papa Ginting 5Alan RamalanBelum ada peringkat
- P05.5-Memory Mapping Practice 02-WACDokumen20 halamanP05.5-Memory Mapping Practice 02-WACNigel BryanBelum ada peringkat
- ModulasiDokumen23 halamanModulasipsastyoBelum ada peringkat
- SamplingDokumen58 halamanSamplingIqbal RamadhanBelum ada peringkat
- Pembagian Band Frekuensi RadioDokumen6 halamanPembagian Band Frekuensi RadioAnisa pBelum ada peringkat
- Vektor Bagian 2 PDFDokumen7 halamanVektor Bagian 2 PDFarisfebrianBelum ada peringkat
- RT 03 KelDokumen4 halamanRT 03 KelLisa JordanBelum ada peringkat
- Besaran TransmisiDokumen34 halamanBesaran TransmisiDas BastardBelum ada peringkat
- El3216 1 13215051Dokumen12 halamanEl3216 1 13215051Andrey PurwantoBelum ada peringkat
- Sinyal Waktu DiskritDokumen45 halamanSinyal Waktu DiskritAri SutartoBelum ada peringkat
- Latihan UAS 201922Dokumen4 halamanLatihan UAS 201922Ivan YapputraBelum ada peringkat
- Kiwan - Laporan - Kerja PraktikDokumen41 halamanKiwan - Laporan - Kerja PraktikSeptian SnBelum ada peringkat
- Makalah Sistem Telekomunikasi Amplitude Shift Keying (Ask)Dokumen12 halamanMakalah Sistem Telekomunikasi Amplitude Shift Keying (Ask)M Alwan Nur AjieBelum ada peringkat
- D-3 03 Thomas Davin Zeans 118130128 EL3109 Alif FauzanDokumen19 halamanD-3 03 Thomas Davin Zeans 118130128 EL3109 Alif FauzanTHOMAS DAVINZEANSBelum ada peringkat
- UTS PSWD No 3 041120 SolusiDokumen4 halamanUTS PSWD No 3 041120 SolusiaurelliaBelum ada peringkat
- Restorasi CitraDokumen26 halamanRestorasi CitraYose ParlindoBelum ada peringkat
- Aritmatika LanjutanDokumen47 halamanAritmatika LanjutanRetyana WahriniBelum ada peringkat
- 3-Sistem Persamaan Non LinierDokumen17 halaman3-Sistem Persamaan Non LinierDoni KurniawanBelum ada peringkat
- PRAKTIKUM DigitalDokumen22 halamanPRAKTIKUM DigitaljcoiiiBelum ada peringkat
- Praktikum 1 Modulator AmDokumen10 halamanPraktikum 1 Modulator AmAdjie SangloyalitasintegritasBelum ada peringkat
- Counter DownDokumen7 halamanCounter DownPratiwi PutriyanBelum ada peringkat
- Filter IirDokumen33 halamanFilter IirStephano CrofBelum ada peringkat
- Digital CounterDokumen14 halamanDigital CounterAdi YuniarBelum ada peringkat
- Laprak - Perbaikan CitraDokumen27 halamanLaprak - Perbaikan CitraEnrico W. FebriardyBelum ada peringkat
- Akhirnya SeleseDokumen17 halamanAkhirnya SeleseM Rizal RBelum ada peringkat
- Laporan Praktikum Elka Digital Ic CounterDokumen16 halamanLaporan Praktikum Elka Digital Ic CounternisrinapsBelum ada peringkat
- Sistem Waktu KontinyuDokumen84 halamanSistem Waktu KontinyuTV ScreenBelum ada peringkat
- BAB6 - Recover - PERAMALAN TRAFIK UNTUK PERENCANAAN JARINGAN PDFDokumen14 halamanBAB6 - Recover - PERAMALAN TRAFIK UNTUK PERENCANAAN JARINGAN PDFFocus ArthamediaBelum ada peringkat
- Tugas TimerDokumen11 halamanTugas TimerbagusBelum ada peringkat
- Modul 12Dokumen8 halamanModul 12Tasya ZumarBelum ada peringkat
- Jurnal Sensor Suhu Tubuh ArduinoDokumen88 halamanJurnal Sensor Suhu Tubuh ArduinoRadilsha MaharaniBelum ada peringkat
- Laporan DPK (Metode Eliminasi Gauss Jordan)Dokumen14 halamanLaporan DPK (Metode Eliminasi Gauss Jordan)nofalBelum ada peringkat
- Bab 2Dokumen25 halamanBab 2Zev B'Yond D GraveBelum ada peringkat
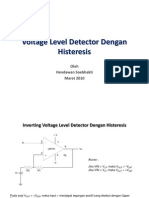
- Voltage Level Detector Dengan HisterisisDokumen9 halamanVoltage Level Detector Dengan HisterisisAhan HanjayaBelum ada peringkat
- DHCPV 4Dokumen16 halamanDHCPV 4Fery SaputraBelum ada peringkat
- Materi Sinyal, Sistem Dan Kontrol 1Dokumen51 halamanMateri Sinyal, Sistem Dan Kontrol 1Fariz Afritzal YushendinataBelum ada peringkat
- Laporan Praktikum Jaringan Komputer - IP AddressingDokumen4 halamanLaporan Praktikum Jaringan Komputer - IP AddressingFaqih UdinBelum ada peringkat
- K4.1 Bentuk-Bentuk Kanonik 1Dokumen23 halamanK4.1 Bentuk-Bentuk Kanonik 1Gem SahajaBelum ada peringkat
- 2-Konfigurasi Sistem KontrolDokumen8 halaman2-Konfigurasi Sistem KontrolFrey LeonBelum ada peringkat
- Ulas Ulang Sistem Waktu DiskritDokumen38 halamanUlas Ulang Sistem Waktu DiskritKing EnvyBelum ada peringkat
- Tugas Akhir MatlabDokumen5 halamanTugas Akhir Matlabimelina putriBelum ada peringkat
- Laporan Proyek DigitalDokumen25 halamanLaporan Proyek DigitalReynaldy Krisna PerdanaBelum ada peringkat
- Desain Filter Digital Menggunakan Teknik Windowing Dengan Simulasi Berbasis MatlabDokumen19 halamanDesain Filter Digital Menggunakan Teknik Windowing Dengan Simulasi Berbasis MatlabRafki ChandraBelum ada peringkat
- 7573 - Uts PSWD 2017Dokumen6 halaman7573 - Uts PSWD 2017Afie RafieBelum ada peringkat
- Pengolahan Sinyal Waktu DiskritDokumen5 halamanPengolahan Sinyal Waktu DiskritMuhAprizalBelum ada peringkat
- Teknik Pengkodean SinyalDokumen32 halamanTeknik Pengkodean SinyalLim Cia ChienBelum ada peringkat
- Modul - Ajar - DSP - 2020-Bab - 05-Respon Frekuensi Sistem LTI PDFDokumen57 halamanModul - Ajar - DSP - 2020-Bab - 05-Respon Frekuensi Sistem LTI PDFbosidang tv0% (1)
- EC Digital Bab 4 - Rangkaian Logika KombinasionalDokumen19 halamanEC Digital Bab 4 - Rangkaian Logika KombinasionalAdegunaBelum ada peringkat
- QPSKDokumen15 halamanQPSKernipurwasihBelum ada peringkat
- Mixer PDFDokumen7 halamanMixer PDFdesisitompulBelum ada peringkat
- Phase Shift KeyingDokumen6 halamanPhase Shift KeyingLhesuikx ChalilBelum ada peringkat
- Analisa & Kriteria Describing FunctionDokumen29 halamanAnalisa & Kriteria Describing FunctionM FebriansyahBelum ada peringkat
- PID Controller Design According To Ziegler - NicholsDokumen8 halamanPID Controller Design According To Ziegler - NicholsTrigitha MelintikaBelum ada peringkat
- Respon FrekuensiDokumen21 halamanRespon FrekuensiduelxBelum ada peringkat
- Analisa Kestabilan Dengan Metode NyquistDokumen9 halamanAnalisa Kestabilan Dengan Metode NyquistjayaBelum ada peringkat