Kuliah 03 - Matriks Dan Vektor
Diunggah oleh
arumaiza kurniawanDeskripsi Asli:
Judul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Kuliah 03 - Matriks Dan Vektor
Diunggah oleh
arumaiza kurniawanHak Cipta:
Format Tersedia
MODUL PERKULIAHAN
Metoda Numerik
Lanjut
Matriks dan Vektor
Program
Direktorat Modul Kode MK Disusun Oleh
Studi
Pasca Sarjana Magister W571700010 Ir. Pariatmono Sukamdo, MSc, DIC, PhD
Teknik Sipil 03
Abstract Kompetensi
Modul ini menjelaskan tentang Memahami sifat-sifat matriks dan
sifat-sifat matriks dan vektor vektor serta penggunaannya
beserta operasi dan Merumuskan permasalahan
manipulasinya kemudian diikuti rekayasa struktur menggunakan
dengan penerapannya dalam matriks dan vektor
perumusan masalah dalam
rekayasa struktur.
1. Pendahuluan
Matriks adalah kumpulan bilangan, simbol atau ekspresi yang ditempatkan berdasarkan baris
dan kolom1. Dengan ditampilkan menggunakan matriks, analisis dan perhitungan dapat
dilakukan secara lebih terstruktur.
Banyaknya kolom dan baris suatu matriks disebut dengan dimensi matriks, sedangkan
bilangan, simbol atau ekspresi yang menjadi penyusun matriks disebut dengan elemen atau
anggota matriks. Matriks umumnya ditulis dalam tanda kurung siku, yaitu:
𝑎11 𝑎12 𝑎13 ⋯ 𝑎1𝑛
𝑎21 𝑎22 𝑎23 ⋯ 𝑎2𝑛
𝑎
[𝐴] = 𝐀 = 31 𝑎 32 𝑎 33 ⋯ 𝑎3𝑛
⋮ ⋮ ⋮ ⋱ ⋮
[ 𝑎𝑚1 𝑎𝑚2 𝑎𝑚3 ⋯ 𝑎𝑚𝑛 ]
Dalam matriks [𝐴] (kadang-kadang ditulis sebagai 𝐀) di atas, 𝑎𝑖𝑗 (𝑖 = 1, 𝑚; 𝑗 = 1, 𝑛) adalah
elemen matriks [𝐴]. Matriks [𝐴] mempunyai 𝑚 buah baris dan 𝑛 buah kolom sehingga disebut
mempunyai dimensi 𝑚 × 𝑛. Suatu matriks [𝐵] merupakan transpos (transpose) dari [𝐴], atau
[𝐵] = [𝐴]𝑇 jika 𝑏𝑖𝑗 = 𝑎𝑗𝑖 . Jadi, jika dimensi matriks [𝐴] adalah 𝑚 × 𝑛, maka dimensi matriks [𝐵]
adalah 𝑛 × 𝑚.
Jika 𝑚 = 1, matriks [𝐴] disebut matriks baris. Sedangkan jika 𝑛 = 1, matriks [𝐴] disebut
̅ . Jadi, transpos dari matriks
matriks kolom atau vektor dan umumnya ditulis dengan {𝐴} atau 𝑨
baris menghasilkan matrik kolom (atau vektor), dan sebaliknya.
Jika 𝑚 = 𝑛, matriks [𝐴] disebut matriks bujursangkar. Matriks bujursangkar ini, terbagi menjadi
beberapa golongan, antara lain:
• Matriks simetris, yaitu jika 𝑎𝑖𝑗 = 𝑎𝑗𝑖 . Pada matriks simetris, berlaku [𝐴]𝑇 = [𝐴].
• Matriks diagonal, yaitu jika 𝑎𝑖𝑗 = 0 untuk semua 𝑖 ≠ 𝑗. Matriks diagonal adalah
keadaan khusus dari matriks simetris.
• Matriks tridiagonal, yaitu matriks yang semua elemennya nol, kecuali elemen-elemen
pada diagonal dan elemen-elemen pada dua diagonal lainnya yang paling berdekatan
dengan diagonal.
• Matriks identitas, yaitu jika 𝑎𝑖𝑗 = 1 untuk 𝑖 = 𝑗, dan 𝑎𝑖𝑗 = 0 untuk 𝑖 ≠ 𝑗. Matriks identitas
adalah keadaan khusus dari matriks diagonal dan biasa ditulis sebagai [𝐼]. Suatu
matriks [𝐴] jika dikalikan dengan matriks identitas [𝐼] akan menghasilkan matriks [𝐴]
itu sendiri, atau [𝐴][𝐼] = [𝐼][𝐴] = [𝐴]
1
https://id.wikipedia.org/wiki/Matriks_(matematika), dilihat pada 22 Juni 2016
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
2 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
• Matriks nol, yaitu matriks yang semua elemennya nol dan biasa ditulis sebagai [0].
Semua matriks yang dikalikan dengan matriks nol, akan menghasilkan matriks nol,
atau [𝐴][0] = [0][𝐴] = [0].
• Matriks invers (kebalikan). Matriks [𝐵] merupakan invers dari matriks [𝐴] jika
[𝐴] × [𝐵] = [𝐵] × [𝐴] = [𝐼]. Dalam hal ini, sering ditulis bahwa [𝐵] = [𝐴]−1 dan
sebaliknya.
• Matriks segitiga (triangular matrix), yaitu matriks yang elemen bagian atasnya (atau
elemen bagian bawahnya) hingga batas elemen diagonal mempunyai nilai, sedangkan
bagian lainnya nol. Jika elemen bagian atasnya yang tidak nol, matriks ini disebut
matriks segitiga atas (upper triangular matrix), sedangkan jika elemen bawahnya yang
tidak nol, disebut dengan matriks segitiga bawah (lower triangular matrix). Dengan
demikian, matriks [𝐴] disebut matriks segitiga atas jika,
𝑎𝑖𝑗 ≠ 0 untuk 𝑖 ≤ 𝑗
{
𝑎𝑖𝑗 = 0 untuk 𝑖 > 𝑗
• Matriks Jarang (sparse matrix) adalah matriks yang sebagian besar elemennya nol.
• Matriks Orthogonal adalah matriks yang invers-nya sama dengan transpos-nya, atau
[𝐴]−1 = [𝐴]𝑇 atau dapat juga dituliskan sebagai [𝐴]𝑇 [𝐴] = [𝐴][𝐴]𝑇 = [𝐼]
• Matriks Singular adalah matriks yang mempunyai determinan sama dengan nol
(determinan akan dijelaskan kemudian).
2. Manipulasi Matriks
Seperti halnya variabel, matriks dapat dimanipulasi (seperti dijumlahkan, dikurangkan,
dikalikan, dsb) dan di-dekomposisi-kan. Berikut ini beberapa manipulasi matriks.
1. Penjumlahan matriks,
[𝐶] = [𝐴] + [𝐵] → 𝑐𝑖𝑗 = 𝑎𝑖𝑗 + 𝑏𝑖𝑗
Jelas bahwa dimensi matriks yang dijumlahkan ([𝐴] dan [𝐵]) harus sama dan akan
menghasilkan matriks baru ([𝐶]) yang dimensinya sama pula. Perlu digarisbawahi bahwa sifat
komutatif (pertukaran) dan asosiatif (pengelompokan) tetap berlaku pada penjumlahan
matriks. Jadi,
[𝐴] + [𝐵] = [𝐵] + [𝐴]
([𝐴] + [𝐵]) + [𝐶] = [𝐴] + ([𝐵] + [𝐶])
2. Perkalian Matriks
Matriks [𝐴] hanya dapat dikalikan dengan matriks [𝐵] jika jumlah kolom matriks [𝐴] sama
dengan jumlah baris matriks [𝐵]. Hasil perkaliannya adalah matriks [𝐶] yang banyak barisnya
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
3 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
sama dengan jumlah baris matriks [𝐴] dan banyak kolomnya sama dengan jumlah kolom
matriks [𝐵]. Dengan kata lain,
[𝐴]𝑚×𝑛 × [𝐵]𝑛×𝑝 = [𝐶]𝑚×𝑝
Adapun setiap elemen pada matriks [𝐶] dapat dihitung dengan:
𝑛
𝑐𝑖𝑗 = ∑ 𝑎𝑖𝑘 𝑏𝑘𝑗
𝑘=1
Perlu digaris-bawahi bahwa perkalian matriks tidak bersifat komutatif, artinya
[𝐴] × [𝐵] ≠ [𝐵] × [𝐴]
Selain itu, perlu digaris-bawahi sifat perkalian matriks transpos, yaitu:
([𝐴][𝐵])𝑇 = [𝐵]𝑇 [𝐴]𝑇
([𝐴][𝐵][𝐶])𝑇 = [𝐶]𝑇 [𝐵]𝑇 [𝐴]𝑇
Penjelasan lebih lanjut tentang algoritma dalam perhitungan perkalian matriks akan diberikan
pada bagian berikutnya dari modul ini.
3. Determinan Matriks
Suatu matriks bujursangkar [𝐴] dengan dimensi 𝑛 × 𝑛, mempunyai determinan det 𝐴 (atau
ditulis juga sebagai det[𝐴] atau |𝐴|). Beberapa sifat determinan:2
det([𝐴]𝑇 ) = det 𝐴
1
det([𝐴]−1 ) = (det 𝐴)−1 =
det 𝐴
det([A] × [B]) = det A × det B
Untuk menghitung determinan, dibutuhkan beberapa definisi:
1. Minor elemen aij dari matriks [A] dengan dimensi n × n adalah determinan dari suatu
matriks (n − 1) × (n − 1) yang dibentuk dari matriks [A] dengan membuang baris ke-i
dan kolom ke-j
2. Kofaktor dari aij (diberi notasi Aij ) adalah suatu bilangan hasil perkalian antara (−1)i+j
dengan minor elemen aij .
Determinan dari matriks [A] dapat dihitung sebagai
n n
det[A] = ∑ apj Apj = ∑ aqk Aqk
j=1 k=1
Contoh 1:
a11 kofaktor a11 a21 kofaktor a21
1 4 ⏞ × ⏞ ⏞ × ⏞
det [ ] = (1) (5) + (4)
⏟ × (−2)
⏟ = (2) (−4) + (5) × (1) = −3
2 5
a12 kofaktor a12
2
Luknanto, D., “Metoda Numerik”, Bahan Kuliah Metoda Numerik, Jurusan Teknik Sipil FT UGM,
Yogyakarta, November 2001, bisa diunduh dari luk.staff.ugm.ac.id/numerik/MetodaNumerik.pdf
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
4 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
5 3 −1
det [1 −1 2 ]
2 −3 4
kofaktor a11 kofaktor a13
⏞ −1 2 1 −1 ⏞ 1 −1
= 5 × (−1)1+1 × | | + 3 × (−1)1+2 | | + (−1) × (−1)1+3 × | |
−3 4 ⏟ 2 −3 2 −3
kofaktor a12
= 5 × (+1) × (−4 + 6) + 3 × (−1) × (4 − 4) + (−1) × (+1) × (−3 + 2) = 11
Secara numerik, determinan suatu matriks [A]n×n dapat dihitung menggunakan metode
kofaktor yang berdasarkan pada kolom pertama, yaitu:
n
det[A] = ∑ ai1 Ai1 = a11 A11 + a21 A21 + a31 A31 + ⋯ + an1 An1
i−1
Jika [A] adalah matriks segitiga atas, maka
ai1 = 0 untuk i = 2,3, ⋯ , n
sehingga
det[A] = a11 A11 = a11 a22 a33 ⋯ ann
Jika [A] bukan matriks segitiga atas, maka dapat diupayakan (dengan operasi baris, lihat
contoh) agar [A] menjadi matriks segitiga atas, sehingga
a11 a12 ⋯ a1n u11 u12 ⋯ u1n
a21 a22 ⋯ a2n 0 a22 ⋯ u2n
det[A] = | ⋮ ⋮ | = K| |
⋱ ⋮ ⋮ ⋮ ⋱ ⋮
an1 an2 ⋯ ann 0 0 ⋯ unn
Contoh 2: Hitunglah determinan matriks berikut ini
1 4 2 −1
3 −5 6 1
[A] = [ ]
1 0 4 5
−6 1 9 7
1. a) Kalikan baris 1 dengan (−3) dan tambahkan ke baris 2
b) Kalikan baris 1 dengan (-1) dan tambahkan ke baris 3
c) Kalikan baris 1 dengan (+6) dan tambahkan ke baris 4
diperoleh:
1 4 2 −1
0 −17 0 4
det[A] = | |
0 −4 2 6
0 25 21 1
2. Bagi baris kedua dengan (−17) diperoleh
1 4 2 −1
0 1 0 − 4⁄17
det[A] = (−17) × | |
0 −4 2 6
0 25 21 1
3. a) Kalikan baris 2 dengan (+4) dan tambahkan ke baris 3
b) Kalikan baris 2 dengan (-25) dan tambahkan ke baris 4
diperoleh
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
5 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
1 4 2 −1
0 1 0 − 4⁄17
det[A] = (−17) × | |
0 0 2 86⁄17
0 0 21 117⁄17
4. Bagi baris 4 dengan (+2) diperoleh
1 4 2 −1
0 1 0 − 4⁄17
det[A] = (−17) × (+2) × | |
0 0 1 86⁄34
0 0 21 117⁄17
5. Kalikan baris 3 dengan (-21) dan tambahkan ke baris 4, diperoleh
1 4 2 −1
0 1 0 − 4⁄17
det[A] = (−17) × (+2) × | |
0 0 1 86⁄34
0 0 0 −786⁄17
Determinan matriks [A] = det[A] = (−17) × (+2) × (1) × (1) × (1) × (−786⁄17) = 1572
4. Diferensial dan Integral
Sebuah matriks dapat di-diferensialkan atau diintegrasikan dengan men-diferensial-kan atau
meng-integrasi-kan elemen-elemennya3
Contoh 3:
x2 3 sin x −x 4 d[A] 2x 3 cos x −4x 3
2
[A] = [3 sin x −x (cos x) ] ⟹ = [3 cos x −1 −2 cos x sin x]
dx
−x 4 (cos x) 2 7x 3 −4x 3
−2 cos x sin x 21x 2
x L
1− L
[B] = { x } ⇒ ∫[B][B]T dx = [2
L 1
]
6 1 2
0
L
5. Matriks Partisi
Matriks dapat dibagi-bagi atau di-partisi menjadi sejumlah matriks yang lebih kecil yang
disebut dengan sub-matriks. Operasi matriks (seperti penjumlahan atau perkalian) dapat
dilakukan terhadap matriks partisi dengan mengganggap sub-matriks-nya sebagai elemen
dari matriks partisi.
https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0ahUKEwj_6KC_qe3NAhUST
o8KHUBoBpAQFggcMAA&url=http%3A%2F%2Fwww.pucmmsti.edu.do%2Fwebsise%2Festudiante%2Fmat
erias%2F201220131%2FST-IC%2520-424-T-
001%2FAnalisis%2520Matricial%2C%25201de%25203.pdf&usg=AFQjCNH8vyxteH6NWbJ_AztLLZOYXZfi
hA&sig2=sYrfgxHYWUD69dufkd4IbQ&cad=rja
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
6 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Contoh 4:
+2 −4 −1
[−5 +7] {+3} [B ] {B12 }
[B] = [ ] = [ 11 ]
+8 −9 +6 [B21 ] {B22 } 2×2
[+1 +3] {+8} 4×3
+9 −6
[ ] [C ]
[C] = [ +4 +2 ] = { 11 }
[−3 +1] 3×2 [C 21 ] 2×1
+2 −20 +3 −1 5 −21
[B11 ][C11 ] + {B12 }[C21 ] [−17 +44] + [ −9 +3] −26 47 ]
[B][C] = { } ={ } =[
[B21 ][C11 ] + {B22 }[C21 ] 2×1 +36 −66 −18 +6 18 −60
[+21 0] + [−24 +8] 2×1 −3 8 4×2
6. Matriks Invers
Seperti telah disebutkan, invers dari matriks bujursangkar [A] adalah kebalikannya (disebut
dengan matriks [A]−1 ), sehingga [A][A]−1 = [A]−1 [A] = [I]. Jika matriks [A] adalah matriks
simetris, maka inversnya (matriks [A]−1) juga simetris.
Untuk matriks berdimensi 2 × 2, invers-nya dapat secara langsung dihitung, yaitu:
1
[A] = [a b] ⟹ [A]−1 = [
d −b
]
c d ad − bc −c a
Dalam hal ini, (ad − bc) disebut dengan determinan, dan tidak boleh sama dengan nol. Seperti
telah disebutkan sebelumnya, jika (ad − bc) = 0, maka matriks [A] tidak mempunyai invers
dan disebut dengan matriks singular.
Untuk matriks bujursangkar [A]n×n dengan n > 2, invers-nya dapat dilakukan dengan
membentuk matriks gabungan [G] yang menyatukan matriks [A]n×n dengan matriks identitas
[I]n×n sehingga matriks gabungan [G] berukuran (n × 2n). Selanjutnya dilakukan operasi baris
(lihat contoh) terhadap matriks G tersebut sehingga matriks [A] berubah menjadi matriks
identitas [I] sedangkan matriks identitas [I] berubah menjadi matriks [A]−1 .
Contoh 5: Hitung invers dari matriks simetris berikut.
13 −6 6
[A] = [−6 12 −1]
6 −1 9
Matriks gabungan dibentuk dengan menyatukan matriks [A] dengan matriks identitas [I],
yaitu:
13 −6 6 1 0 0
[G] = ⟨[A]|[I]⟩ = ⟨−6 12 −1|0 1 0⟩
6 −1 9 0 0 1
1. Bagi baris 1 dengan G11 = 13, diperoleh
1 −0,4615 0,4615 0,07692 0 0
[G] = ⟨[A]|[I]⟩ = ⟨−6 12 −1 | 0 1 0⟩
6 −1 9 0 0 1
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
7 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
2. a) Kalikan baris 1 dengan −G21 = +6 lalu tambahkan ke baris 2
b) Kalikan baris 1 dengan −G31 = −6 lalu tambahkan ke baris 3
diperoleh
1 −0,4615 0,4615 0,07692 0 0
[G] = ⟨[A]|[I]⟩ = ⟨0 9,231 1,769 | 0,4615 1 0⟩
0 1,769 6,231 −0,4615 0 1
3. Bagi baris 2 dengan G22 = 9,231, diperoleh
1 −0,4615 0,4615 0,07692 0 0
[G] = ⟨[A]|[I]⟩ = ⟨0 1 0,1916| 0,04999 0,1083 0⟩
0 1,769 6,231 −0,4615 0 1
4. a) Kalikan baris 2 dengan −G12 = +0.4615 lalu tambahkan ke baris 1
b) Kalikan baris 2 dengan −G32 = −1,769 lalu tambahkan ke baris 3
diperoleh
1 0 0,5499 0,09999 0,04998 0
[G] = ⟨[A]|[I]⟩ = ⟨0 1 0,1916| 0,04999 0,1083 0⟩
0 0 5,892 −0,5499 −0,1916 1
5. Bagi baris 3 dengan G33 = 5,892, diperoleh
1 0 0,5499 0,09999 0,04998 0
[G] = ⟨[A]|[I]⟩ = ⟨0 1 0,1916| 0,04999 0,1083 0 ⟩
0 0 1 −0,09333 −0,03252 0,1697
6. a) Kalikan baris 3 dengan −G13 = −0,5499 lalu tambahkan ke baris 1
b) Kalikan baris 3 dengan −G23 = −0,1916 lalu tambahkan ke baris 2
diperoleh:
1 0 0 0,1513 0,06787 −0,09333
[G] = ⟨[A]|[I]⟩ = ⟨0 1 0| 0,06787 0,1145 −0,03252⟩
0 0 1 −0,09333 −0,03252 0,1697
Jadi invers dari matriks [A] adalah
0,1513 0,06787 −0,09333
−1
[A] = [ 0,06787 0,1145 −0,03252]
−0,09333 −0,03252 0,1697
3. Vektor
Seperti telah disebutkan sebelumnya, vektor adalah matriks dengan kolom tunggal dan vektor
A diberi lambang dengan {A} atau ⃗A. Dalam fisika, vektor adalah kuantitas yang memiliki besar
dan arah. Yang termasuk dalam besaran vektor antara lain, gaya, kecepatan, percepatan,
perpindahan, momen, momentum dan sebagainya. Sebagai perbandingan, skalar adalah
kuantitas yang hanya memiliki besaran saja, tapi tidak memiliki arah. Yang termasuk skalar
adalah jarak, energi, massa, suhu, waktu, volume dan sebagainya. Sedangkan tensor adalah
bentuk umum dari skalar dan vektor. Selain memiliki besaran dan arah, tensor juga
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
8 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
memberikan petunjuk di mana tempatnya bekerja. Yang termasuk tensor adalah tegangan
dan regangan.
Kembali ke masalah vektor. Operasi dasar yang terkait dengan vektor antara lain:
1. Penjumlahan
Seperti halnya pada matriks, penjumlahan vektor akan menghasilkan vektor lain yang elemen-
elemennya merupakan penjumlahan dari elemen-elemen vektor yang dijumlahkan.
Jika {Z} = {X} + {Y}, maka zi = xi + yi
2. Perkalian Titik (dot product atau inner product atau scalar product)
Perkalian titik dari dua vektor menghasilkan sebuah besaran skalar. Jika c merupakan hasil
perkalian titik dari vektor {X} dengan vektor {Y}, maka c merupakan penjumlahan dari perkalian
masing-masing elemen vektor {X} dan vektor {Y}, atau
n
T {Y},
Jika c = {X} maka c = ∑ xi yi
i
Dengan demikian, algoritma untuk mendapatkan perkalian titik adalah,
C = 0.0
DO 10 I=1,N
C = C + X(I) * Y(I)
10 CONTINUE
Jelas bahwa perkalian titik dari dua vektor berukuran n memerlukan n buah perkalian dan n
buah penjumlahan. Dengan demikian dapat dikatakan bahwa operasi pada perkalian titik
adalah operasi “O(n)”, artinya banyaknya operasi bertambah secara linear terhadap ukuran
matriks. Algoritma yang baik adalah algoritma yang dapat memperkecil O(n).
3. Perkalian Luar (Outer Product)
Perkalian luar adalah perkalian antara matriks kolom (vektor) dengan matriks baris
menghasilkan matriks segiempat biasa4. Bentuk umum perkalian luar adalah:
[A] = [A] + {X}{Y}T
4
Golub, G.H., Van Loan, C.F., “Matrix Computations”, 4th edition, The Johns Hopkins University Press, 2013.
Bisa diunduh dari tautan berikut:
https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0ahUKEwjpj
Pr02uzNAhVEjJQKHUqrAFkQFggjMAA&url=http%3A%2F%2Fweb.mit.edu%2Fehliu%2FPublic%2Fsclark
%2FGolub%2520G.H.%2C%2520Van%2520Loan%2520C.F.-
%2520Matrix%2520Computations.pdf&usg=AFQjCNHxBKCVK1pJ8R9BQZngZjYEbPMU-
A&sig2=nkc79sI_Z0Khdm3rZTg8vA
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
9 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Dalam hal ini, tanda sama dengan (=) berarti menyamakan (assign) dari operasi yang ada di
sebelah kanannya ke sebelah kiri.
Contoh 6:
1 1 4 5
4 T
{2} [4 5] = {2} { } = [ 8 10]
5
3 3 12 15
4. Perkalian Matriks dengan Vektor
Dalam rekayasa, bentuk yang paling sering muncul dalam perkalian matriks dengan vektor
adalah bentuk
{Y} = [A]{X} + {Y}
Sekali lagi, dalam hal ini, tanda = bukan berarti kesamaan matematis (mathematical equality),
tapi penyamaan (assignment), yaitu pemutakhiran (updating) terhadap nilai sebelumnya dari
vektor {y}. Bentuk seperti ini disebut dengan “gaxpy” yang sebenarnya berarti “penggaliban
(generalized) skalar ax ditambah (plus) y”. Untuk diketahui, gaxpy adalah bentuk umum dari
saxpy (scalar ax plus y) yaitu {y} = a{x} + {y}.
Untuk masalah gaxpy, tiap elemen vektor {y} dapat dihitung berdasarkan
n
yi = yi + ∑ aij xj i = 1, m
j=1
Jadi, algoritma gaxpy dapat ditulis dengan dua cara yaitu yang berdasarkan baris (row-
oriented) dan yang berdasarkan kolom (column-oriented)
Gaxpy berdasarkan baris (row-oriented Gaxpy)
Y(i) = 0.0
DO 10 I=1,M
DO 20 J=1,N
Y(I) = Y(I) + A(I,J) * X(J)
20 CONTINUE
10 CONTINUE
Dari algoritma di atas terlihat bahwa banyaknya perhitungan yang harus dilakukan adalah
O(mn).
Alternatif lain dari algoritma di atas juga dapat diperoleh dengan menanggap matriks [A]
sebagai kumpulan dari kolom-kolom
Contoh 7:
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
10 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
algoritma alternatif
1 2 1×7+2×8 ⏞ 1 2 23
7
[3 4 ] { } = [ 3×7+4×8 ] = 7 × {3 } + 8 × { 4 } = {53}
8 ⏟5 × 7 + 6 × 8
5 6 5 6 83
algoritma biasa
Gaxpy berdasarkan kolom (column-oriented Gaxpy)
Y(i) = 0.0
DO 10 J=1,N
DO 20 I=1,M
Y(I) = Y(I) + A(I,J) * X(J)
20 CONTINUE
10 CONTINUE
4. Perkalian Matriks dengan Matriks
Untuk mempelajari berbagai cara perhitungan perkalian matriks dengan matriks, tinjau contoh
berikut:
Contoh 8: Kita akan menghitung perkalian dua matriks
1 2 5 6
[ ][ ]
3 4 7 8
1. Cara Biasa: dilakukan perkalian titik terhadap setiap elemen matriks
1 2 5 6 1∙5+2∙7 1∙6+2∙8 19 22
[ ][ ]=[ ]=[ ]
3 4 7 8 3∙5+4∙7 3∙6+4∙8 43 50
2. Cara Saxpy: perkalian dilakukan sebagai kombinasi linier (linear combination) dari kolom-
kolom matriks sebelah kiri
1 2 5 6 1 2 1 2 5 + 14 6 + 16 19 22
[ ][ ] = [5 { } + 7 { } 6 { } + 8 { }] = [{ } { }] = [ ]
3 4 7 8 3 4 3 4 15 + 28 18 + 32 43 50
3. Cara Perkalian Luar (Outer Product): hasil perkalian adalah jumlah dari perkalian luar
1 2 5 6 1 5 T 2 7 T 5 6 14 16 19 22
[ ][ ] = { }{ } + { }{ } = [ ]+[ ]=[ ]
3 4 7 8 3 6 4 8 15 18 28 32 43 50
Meskipun berbagai cara tersebut hasilnya sama, namun kinerja (performance)-nya dapat
sangat berbeda karena ketika dalam proses perhitungan menggunakan komputer, terdapat
perbedaan dalam lalu lintas memori. Efisiensi dari suatu algoritma matriks tergantung dari
beberapa faktor
Seperti yang telah disinggung di atas, perkalian matriks-dengan matriks secara umum dapat
dirumuskan sebagai
[𝐴]𝑚×𝑛 × [𝐵]𝑛×𝑝 = [𝐶]𝑚×𝑝
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
11 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
𝑛
𝑐𝑖𝑗 = ∑ 𝑎𝑖𝑘 𝑏𝑘𝑗
𝑘=1
Sehingga algoritma yang dapat digunakan untuk cara biasa dapat dilihat pada contoh program
berikut:
PROGRAM PERKALIAN_MATRIKS_BIASA
INTEGER A(2,2), B(2,2), C(2,2)
DATA A/1,3,2,4/, B/5,7,6,8/
N = 2
! SEKEDAR MEMASTIKAN KEBENARAN DATA
PRINT *, A
PRINT *, B
! PANGGIL SUBROUTINE YANG DIPERLUKAN
PRINT *, "PANGGIL SUBROUTINE CARA BIASA"
CALL KALMAT (A,B,C,N)
PRINT *, "SETELAH DIPANGGIL"
PRINT *, C
END
SUBROUTINE KALMAT (A,B,C,N)
INTEGER A(N,N), B(N,N), C(N,N), N
PRINT *,"DI DALAM SUBROUTINE KALMAT"
DO 10 I=1,N
DO 10 J=1,N
C(I,J) = 0
DO 10 K=1,N
C(I,J)=C(I,J)+A(I,K)*B(K,J)
10 CONTINUE
RETURN
END
5. Pemodelan Matriks pada Rangka
Batang Bidang
Rangka Batang Bidang (plane truss) adalah rangka batang dua dimensi dari batang-batang
lurus dan prismatis (berpenampang sama di sepanjang batang) yang ujung-ujungnya
berhubungan melalui sendi tanpa gesekan (frictionless). Rangka batang ini dibebani dalam
bidang yang sama pada ujung-ujung sendi tersebut.
Pada bagian ini, akan dipelajari analisis rangka batang bidang yang didasarkan pada metoda
matriks kekakuan (matrix stiffness method). Metoda analisis ini berlaku umum karena bisa
diterapkan juga pada struktur statis tertentu (statically determinate structures) maupun
struktur statis tak-tentu (statically indeterminate structures).
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
12 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
5.1. Sistem Koordinat Lokal dan Global
Dalam metoda matriks kekakuan, berlaku dua sistem koordinat untuk menentukan struktur,
pembebanannya dan hubungan antara beban dengan perpindahan (displacement). Kedua
sistem koordinat itu adalah sistem koordinat global (atau sistem koordinat struktur) dan sistem
koordinat lokal (dalam hal ini sistem koordinat batang).
Koordinat global (umumnya berupa Cartesian) digunakan untuk menggambarkan
keseluruhan geometri struktur dan hubungan beban-perpindahan di semua bagiannya.
Umumnya, koordinat global ini berupa koordinat Cartesian XYZ dan struktur terletak pada
bidang XY.
Sedangkan sistem koordinat lokal digunakan untuk memberikan gambaran besarnya beban
dan perpindahan dalam arah searah atau tegak lurus sumbu batang. Gambar di bawah ini
menunjukkan contoh kedua sistem koordinat tersebut terhadap struktur rangka yang terdiri
atas 6 batang5
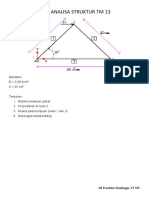
(a) Struktur Rangka Batang Bidang (b) Model analitis yang menunjukkan
sebenarnya Sistem Koordinat Global dan Lokal
Gambar 1: Contoh Rangka Batang Bidang
5
Diambil dari
https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0ahUKEwj_6KC_qe3NAhUST
o8KHUBoBpAQFggcMAA&url=http%3A%2F%2Fwww.pucmmsti.edu.do%2Fwebsise%2Festudiante%2Fmat
erias%2F201220131%2FST-IC%2520-424-T-
001%2FAnalisis%2520Matricial%2C%25201de%25203.pdf&usg=AFQjCNH8vyxteH6NWbJ_AztLLZOYXZfi
hA&sig2=sYrfgxHYWUD69dufkd4IbQ&cad=rja
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
13 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
5.2. Derajat Kebebasan
Secara umum, derajat kebebasan (degree of freedom, DOF) dari suatu struktur adalah
banyaknya perpindahan (dapat berupa lendutan / pergeseran / translations atau perputaran /
rotations) bebas (independent) dari titik kumpul (joints) yang diperlukan untuk dapat
menggambarkan perubahan bentuk (deformed shape) dari struktur akibat pembebanan.
Karena sendi pada titik kumpul bersifat tanpa gesekan, tidak ada momen dan putaran sudut.
Jadi untuk masalah rangka batang, yang perlu dihitung adalah besarnya perpindahan titik
kumpul saja. Dengan demikian, keseluruhan rangka batang pada gambar di atas mempunyai
5 derajat kebebasan, yaitu 1 di titik kumpul 2 dan masing-masing 2 pada titik kumpul 3 dan 4,
seperti terlihat pada gambar di bawah ini.
Gambar 2: Derajat kebebasan dan koordinat peletakan
Ke-lima perpindahan titik kumpul tersebut, dapat dikumpulkan dalam suatu vektor {d}, yaitu:
{d} = {d1 d2 d3 d4 d5 }T
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
14 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Banyaknya baris pada vektor {d} sama dengan besarnya derajat kebebasan, sedangkan
banyaknya derajat kebebasan dapat dihitung sebagai,
NDOF = NC × N − NR
dengan: NDOF = banyaknya derajat kebebasan
NC = banyaknya derajat kebebasan pada setiap titik kumpul. Untuk rangka
batang bidang, NC = 2, yaitu perpindahan searah dengan sumbu-X dan
searah dengan sumbu-Y
N = banyaknya titik kumpul
NR = jumlah total reaksi perletakan, yaitu 2 untuk perletakan sendi dan 1 untuk
perletakan rol.
Jadi untuk rangka batang di atas, banyaknya derajat kebebasan NDOF = 4 × 2 − 3 = 5.
Dengan demikian, perubahan bentuk struktur (deformed structure) setelah pembebanan
dalam arah yang positif adalah seperti pada Gambar 3.
5.3. Penomoran Derajat Kebebasan dan Koordinat Perletakan
Derajat kebebasan diberi nomor dimulai dari titik kumpul dengan nomor yang terkecil yang
mempunyai derajat kebebasan dan terus dilanjutkan hingga titik kumpul dengan nomor
terbesar. Umumnya pada setiap titik kumpul, derajat kebebasan arah X didahulukan, lalu
diikuti oleh arah Y.
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
15 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Gambar 3: Perubahan Bentuk Struktur dan Penomoran derajat kebebasan
Untuk koordinat perletakan, bisa digambarkan dengan panah dan garis miring (↛) untuk
membedakannya dengan panah biasa yang telah digunakan untuk derajat kebebasan.
Penomoran koordinat perletakan dilakukan setelah derajat kebebasan, artinya nomor
koordinat perletakan dimulai dari NDOF + 1 (lihat gambar di bawah)
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
16 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Gambar 4: Penomoran koordinat perletakan
5.4. Vektor Beban pada Titik Kumpul
Beban luar yang bekerja pada titik kumpul rangka batang, dinyatakan dengan komponen gaya
dalam arah X dan arah Y dari koordinat global, positif jika searah dengan positif dari sumbu X
dan Y. Dengan demikian, beban miring pada titik kumpul 3 (lihat Gambar 1(a)) harus diuraikan
dalam komponen-komponen yang searah dengan sumbu X (150 cos 30° = 129,9k) dan sumbu
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
17 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Y (150 sin 30° = 75k). Jadi beban-beban pada titik kumpul dari seluruh rangka batang dapat
secara bersama ditulis sebagai:
{P} = {P1 P2 P3 P4 P5 }T = {0 129,9 −75 0 −75}T
Vektor {P} disebut dengan vektor beban pada titik kumpul dari rangka batang.Perlu digaris
bawahi bahwa banyaknya baris pada vektor {P} sama dengan banyaknya derajat kebebasan.
5.5. Vektor Reaksi Perletakan
Suatu perletakan menahan perpindahan dari suatu titik kumpul dalam arah tertentu sehingga
menimbulkan reaksi perletakan pada titik kumpul itu dalam arah yang sesuai dengan arah
yang ditahannya. Dalam kasus di atas, keseluruhan reaksi perletakan dapat dikumpulkan
dalam satu vektor reaksi perletakan yaitu,
{R} = {R 6 R7 R 8 }T
Banyaknya baris pada vektor reaksi perletakan sama banyaknya dengan banyaknya reaksi
perletakan NR.
5.6. Hubungan Kekakuan Batang dalam Sistem Koordinat Lokal
Dalam metoda kekakuan, perpindahan titik kumpul {d} pada suatu struktur karena beban luar
{P}, ditentukan dengan menyelesaikan sistem persamaan simultan yang dinyatakan dalam
bentuk,
[K]{d} = {P}
Matriks [K] disebut dengan matriks kekakuan stuktur. Untuk keseluruhan struktur, matriks ini
dibentuk dengan merangkai matriks kekakuan dari tiap batang. Matriks kekakuan untuk suatu
batang memberikan hubungan antara gaya yang bekerja di ujung-ujung batang dengan
perpindahan yang terjadi di ujung-ujung tersebut.
Sebagai contoh, lihat rangka batang pada Gambar 5(a). Suatu rangka batang akan berubah
bentuk (deform) ketika dibebani. Selain itu, timbul pula gaya-gaya dalam pada batang-batang
tersebut untuk “melawan” beban luar.
Posisi awal dan bentuk setelah dibebani dari rangka batang tersebut ditunjukkan pada
Gambar 5(b). Dalam hal ini L, E dan A masing-masing adalah panjang, modulus elastisitas
dan penampang batang m. Agar dapat sepenuhnya menentukan perpindahan setiap titik pada
batang m, perlu diketahui perpindahan ujung-ujung batang dalam arah x dan arah y. Jadi,
batang m mempunyai 4 perpindahan pada ujungnya, yaitu {u} = {u1 u2 u3 u4 }T. Selain
itu, timbul pula gaya-gaya dalam {Q} = {Q1 Q2 Q3 Q 4 }T yang searah dan tegak lurus
batang. Perlu digaris-bawahi bahwa perpindahan dan gaya-gaya dalam ini seluruhnya dalam
sistem koordinat lokal dari batang m.
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
18 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
(a) Struktur Rangka Batang
(b) Perpindahan {u} dan Gaya-gaya Dalam {Q} pada Batang m
Harus selalu diingat bahwa yang ingin kita ketahui adalah hubungan antara perpindahan {u}
dengan gaya-gaya dalam {Q}. Hubungan tersebut dapat terlihat nyata jika dilakukan
pemisahan terhadap pengaruh dari masing-masing gaya-gaya dalam Q i terhadap
perpindahan {u} dari keseluruhan batang m, seperti yang diperlihatkan pada Gambar 5(c)
sampai dengan Gambar 5(f). Diagram pada Gambar 5(b) sebenarnya adalah gabungan atau
jumlah dari diagram-diagram pada Gambar 5(c) sampai Gambar 5(f) tersebut.
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
19 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Gambar 5: Penyusunan matriks kekakuan batang dalam koordinat lokal
Dari Gambar 5(c) – 5(f) tersebut terlihat bahwa
{Q} = [k]{u}
Dalam hal ini, matriks [k] adalah matriks kekakuan suatu batang dalam sistem koordinat lokal,
yaitu,
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
20 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
k11 k12 k13 k14
k 21 k 22 k 23 k 24
[k] = [ ]
k 31 k 32 k 33 k 34
k 41 k 42 k 43 k 44
Masing-masing elemen dari matriks [k] yaitu k ij disebut sebagai koefisien kekakuan dari
batang m. Setiap elemen k ij merupakan besarnya gaya dalam (baik yang searah atau tegak
lurus batang, sesuai dengan urutannya masing-masing) yang bekerja pada titik i yang
mengakibatkan perpindahan satu satuan pada titik j (uj = 1) sedangkan besarnya
perpindahan pada titik lainnya sama dengan nol. Besarnya gaya dalam ini dapat diperoleh
dengan menerapkan persamaan keseimbangan dan kompatibilitas yang berdasarkan pada
mekanika bahan. Dengan demikian, gaya-gaya dalam yang diperoleh dengan mengambil satu
satuan perpindahan sebenarnya merupakan koefisien kekakuan dari suatu batang.
Seperti kita ketahui, suatu batang yang mempunyai panjang L, modulus elastisitas E dan luas
penampang A, jika dibebani sebesar P dalam arah sumbu batang, akan bertambah panjang
(juga dalam arah sumbu batang) sebesar ΔL, yaitu:
PL EA
ΔL = ⇔P= ΔL
EA L
Karena permasalahan yang dibahas adalah rangka batang, tidak ada perpindahan dalam arah
tegak lurus sumbu batang. Dalam Gambar 5(b), hal ini menunjukkan bahwa
u2 = u4 = 0 ⟹ Q 2 = Q 4 = 0
Dengan demikian, jika u1 = 1 dan u3 = 0 (lihat Gambar 5(c)), maka
EA EA
Q1 = u = = k11
L 1 L
EA EA
Q3 = − u1 = − = k 31
L L
Q 2 = k 21 = Q 4 = k 41 = 0
Sedangkan, jika u1 = 0 dan u3 = 1 (lihat Gambar 5(e)), maka
EA EA
Q1 = − u3 = − = k13
L L
EA EA
Q3 = u3 = = k 33
L L
Q 2 = k 23 = Q 4 = k 43 = 0
Sehingga, diperoleh matriks kekakuan batang m seperti di bawah ini yang merupakan matriks
simetris (k ij = k ji ). Perlu dicatat bahwa semua matriks kekakuan dari struktur yang linier
elastis merupakan matriks simetris.
1 0 −1 0
EA 0 0 0 0]
[k] = [
L −1 0 1 0
0 0 0 0
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
21 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Tugas
1. Buatlah algoritma dalam rangka membuat program komputer untuk menghitung
determinan matriks. Gunakan matriks pada Contoh 2 untuk menguji kebenaran
program yang dibuat.
2. Susun juga program komputer untuk menghitung invers dari suatu matriks. Gunakan
matriks pada Contoh 5.
3. Lihat Gambar 1. Hitung matriks kekakuan dari masing-masing batang.
Rujukan
Anonim, konsep buku tentang penyelesaian masalah struktur dengan cara matriks. Dapat
diunduh dari
https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0ahUKE
wj_6KC_qe3NAhUSTo8KHUBoBpAQFggcMAA&url=http%3A%2F%2Fwww.pucmmsti.
edu.do%2Fwebsise%2Festudiante%2Fmaterias%2F201220131%2FST-IC%2520-
424-T-
001%2FAnalisis%2520Matricial%2C%25201de%25203.pdf&usg=AFQjCNH8vyxteH6
NWbJ_AztLLZOYXZfihA&sig2=sYrfgxHYWUD69dufkd4IbQ&cad=rja
Golub, G.H., Van Loan, C.F., “Matrix Computations”, 4th edition, The Johns Hopkins
University Press, 2013. Bisa diunduh dari tautan berikut:
https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact
=8&ved=0ahUKEwjpjPr02uzNAhVEjJQKHUqrAFkQFggjMAA&url=http%3A%2F%2Fw
eb.mit.edu%2Fehliu%2FPublic%2Fsclark%2FGolub%2520G.H.%2C%2520Van%2520
Loan%2520C.F.-
%2520Matrix%2520Computations.pdf&usg=AFQjCNHxBKCVK1pJ8R9BQZngZjYEbP
MU-A&sig2=nkc79sI_Z0Khdm3rZTg8vA
Luknanto, D., “Metoda Numerik”, Bahan Kuliah Metoda Numerik, Jurusan Teknik Sipil FT
UGM, Yogyakarta, November 2001, bisa diunduh dari
luk.staff.ugm.ac.id/numerik/MetodaNumerik.pdf
Wang, Chu Kia, “Pengantar Analisis Struktur dengan Cara Matriks” (diterjemahkan oleh
Ismoyo), Prentice-Hall, 1973, bisa diunduh dari
https://darmadi18.files.wordpress.com/2010/09/pengantar-analisis-struktur-
matriks.pdf
Lampiran: Tautan-tautan (Links) yang
Bermanfaat
1. Netlib -- http://www.netlib.org/
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
22 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Netlib merupakan tempat penyimpanan berbagai perangkat lunak untuk perhitungan ilmiah
dalam jumlah yang sangat besar. Di Netlib, terdapat program komputer (terutama dalam
bahasa pemrograman FORTRAN) terhadap berbagai masalah rekayasa dan matematika.
Netlib ini dikembangkan sebelum paket perangkat lunak menjadi komoditas yang dapat
diperjual-belikan seperti sekarang, karena itu perangkat lunak pada Netlib umumnya milik
umum (public domain).6
2. Matrix Market -- http://math.nist.gov/MatrixMarket/
Matrix Market adalah tempat penyimpanan matriks-matriks yang dapat digunakan untuk
menguji algoritma pemrograman yang kita kembangkan sendiri.
3. Matlab Central -- http://www.mathworks.com/matlabcentral/
Berisi demo penggunaan perangkat lunak MATLAB
4. Kumpulan Matriks Jarang -- http://www.cise.ufl.edu/research/sparse/matrices/
Berisi ribuan contoh matriks jarang dalam berbagai format yang tersimpan pada University of
Florida
5. ARPACK -- http://www.caam.rice.edu/software/ARPACK/
Kumpulan subrutin dalam bahasa pemrograman FORTRAN untuk menyelesaikan masalah-
masalah nilai eigen.
6. FORTRAN Compiler --- http://www.cse.yorku.ca/~roumani/fortran/ftn.htm
6
https://en.wikipedia.org/wiki/Netlib
2021 Metoda Numerik Lanjut Pusat Bahan Ajar dan eLearning
23 Ir. Pariatmono Sukamdo, MSc, DIC, PhD http://www.mercubuana.ac.id
Anda mungkin juga menyukai
- Buku Aljabar Linear - Matriks OperasinyaDokumen29 halamanBuku Aljabar Linear - Matriks Operasinyacv.valacecityconstructionBelum ada peringkat
- Muhamad Adrik Satrio Laksono - 20021044 - Matematika B - Tgs 1Dokumen11 halamanMuhamad Adrik Satrio Laksono - 20021044 - Matematika B - Tgs 1Adrik Muhammad100% (1)
- 4 Matriks Dan DeterminanDokumen8 halaman4 Matriks Dan DeterminanNaufal RahmatullahBelum ada peringkat
- Kelompok 11 - Matriks, Transformasi, Dan VektorDokumen73 halamanKelompok 11 - Matriks, Transformasi, Dan VektorDini FebyBelum ada peringkat
- Makalah Pemakaian Matrix Dalam EkonomiDokumen22 halamanMakalah Pemakaian Matrix Dalam EkonomiJasmine Salsabila LutfiBelum ada peringkat
- Handout MatriksDokumen10 halamanHandout MatriksIlmiatir100% (1)
- Makalah DeterminanDokumen12 halamanMakalah Determinanhafizh phoennaBelum ada peringkat
- LKPD Determinan Matriks#Luiana (11715201163)Dokumen9 halamanLKPD Determinan Matriks#Luiana (11715201163)Dalfah Ratna DewiBelum ada peringkat
- Ma TriksDokumen8 halamanMa TriksFabian SamudraBelum ada peringkat
- Modul Matriks - Pertemuan 1 PDFDokumen8 halamanModul Matriks - Pertemuan 1 PDFGung GiscaBelum ada peringkat
- Matriks (Pertemuan Ke 15)Dokumen3 halamanMatriks (Pertemuan Ke 15)Ruud Van OutsidersBelum ada peringkat
- Pengertian MatriksDokumen9 halamanPengertian MatriksHeidy Amelia SetiaputriBelum ada peringkat
- MATRIKSDokumen38 halamanMATRIKSLutfia AmeliaBelum ada peringkat
- Tugas Makalah Matematika LanjutanDokumen17 halamanTugas Makalah Matematika LanjutanKang JinnoBelum ada peringkat
- Matriks Dan RelasiDokumen4 halamanMatriks Dan Relasi03-Atika Rokhma-XIMipa3 SMAN1PasuruanBelum ada peringkat
- Mathemat I KDokumen8 halamanMathemat I KnadiaBelum ada peringkat
- Materi 10 Matriks InversDokumen12 halamanMateri 10 Matriks InversMariatul KiptiahBelum ada peringkat
- RPP Bab Matriks Kelas XI Semester 1 Kurikulum 2013Dokumen28 halamanRPP Bab Matriks Kelas XI Semester 1 Kurikulum 2013Dina may100% (1)
- MBL-K9 Matriks Dan Operasinya PDFDokumen22 halamanMBL-K9 Matriks Dan Operasinya PDFSekar ayu MifthadillahBelum ada peringkat
- Hilma NajmahDokumen22 halamanHilma NajmahM Amran Abdu RosyidBelum ada peringkat
- Cardinality & MatrixDokumen6 halamanCardinality & Matrix03-Atika Rokhma-XIMipa3 SMAN1PasuruanBelum ada peringkat
- ISI Determinan MatriksDokumen7 halamanISI Determinan Matrikssarwan hamidBelum ada peringkat
- Komang Angga Widiatma - ALJABAR LINEARDokumen10 halamanKomang Angga Widiatma - ALJABAR LINEAR13Komang Angga WidiatmaBelum ada peringkat
- Matriks LanjutanDokumen14 halamanMatriks Lanjutandianapuspitasari696Belum ada peringkat
- Makalah MatriksDokumen22 halamanMakalah MatriksSyera AgneozkyBelum ada peringkat
- Matriks IDokumen8 halamanMatriks Ibkdpsdm dompuBelum ada peringkat
- MatriksDokumen11 halamanMatriksErna SiregarBelum ada peringkat
- Makalah Matematika GammaDokumen10 halamanMakalah Matematika GammaPrstndamellBelum ada peringkat
- Bahan Ajar UlDokumen7 halamanBahan Ajar UlNur IsramiyantiBelum ada peringkat
- Makalah Transpose Dan Kesamaan Dua MatriksDokumen10 halamanMakalah Transpose Dan Kesamaan Dua MatriksalwinisnawatiBelum ada peringkat
- MatrikDokumen28 halamanMatrikYeni TriasariBelum ada peringkat
- Topik 7 E-Learning - MATRKSDokumen19 halamanTopik 7 E-Learning - MATRKSRaihan Rohadatul 'AisyBelum ada peringkat
- Matriks Jenis Dan Operasi MatriksDokumen7 halamanMatriks Jenis Dan Operasi Matriksryan emanuelBelum ada peringkat
- 013 - Bintang Nur Rohim - Tugas 1 PLM CDokumen5 halaman013 - Bintang Nur Rohim - Tugas 1 PLM CBintang RohimBelum ada peringkat
- Bab 1 Matriks Dan DerteminanDokumen17 halamanBab 1 Matriks Dan Derteminanmawar_polbengBelum ada peringkat
- Laprak Matlab 1Dokumen11 halamanLaprak Matlab 1Amar SinagaBelum ada peringkat
- RPP Mikro (Matriks)Dokumen31 halamanRPP Mikro (Matriks)Firda AmiliyantoBelum ada peringkat
- Determinan MatriksDokumen9 halamanDeterminan MatriksYon setiawanBelum ada peringkat
- Isi Perbaikan KalkulusDokumen19 halamanIsi Perbaikan KalkulusZx_luthfiBelum ada peringkat
- Topik 5.determinan MatriksDokumen29 halamanTopik 5.determinan MatriksRonnie AndreasBelum ada peringkat
- 4 MatriksDokumen5 halaman4 MatriksPrasetyo PramonoBelum ada peringkat
- Modul 13 - Matematika TeknikDokumen16 halamanModul 13 - Matematika TeknikRizky RamadhanBelum ada peringkat
- Matriks Pertemuan 3 PDFDokumen9 halamanMatriks Pertemuan 3 PDFDidik SuhandriBelum ada peringkat
- Matrix Dan DeterminanDokumen19 halamanMatrix Dan DeterminanPanji Wahyu BimantoroBelum ada peringkat
- Materi Matriks ModulDokumen10 halamanMateri Matriks Modulnandaninurratnasari 26Belum ada peringkat
- Revisi Kel1 - Aljabar - PSPM - 22DDokumen35 halamanRevisi Kel1 - Aljabar - PSPM - 22Dazritazdin.4222111004Belum ada peringkat
- Jepretan Layar 2023-08-07 Pada 08.48.26Dokumen12 halamanJepretan Layar 2023-08-07 Pada 08.48.26Awit FebriansariBelum ada peringkat
- Invers MatriksDokumen7 halamanInvers MatriksJuni GeminersBelum ada peringkat
- Fungsi-Fungsi MatriksDokumen15 halamanFungsi-Fungsi MatriksArco DewaBelum ada peringkat
- Matriks BenarDokumen11 halamanMatriks BenarIngee DwiBelum ada peringkat
- Klmp4 1D32 TTP MatrikDokumen14 halamanKlmp4 1D32 TTP MatrikIrsan TriadiBelum ada peringkat
- Kelompok 2Dokumen25 halamanKelompok 2Agus WuryantoBelum ada peringkat
- Aljabar Linier Jenis2 Dan Operasi MatriksDokumen15 halamanAljabar Linier Jenis2 Dan Operasi MatriksRiza Hilmi 22Belum ada peringkat
- Week2 1Dokumen37 halamanWeek2 1Tes TooBelum ada peringkat
- MAKALAH MATRIKS (Last)Dokumen19 halamanMAKALAH MATRIKS (Last)Arika Dinda Stevani PurbaBelum ada peringkat
- Modul IvDokumen5 halamanModul IvRahmaakrtikaBelum ada peringkat
- Matriks FixDokumen54 halamanMatriks FixSherliana Halim100% (3)
- Bahan Ajar Lesson StudyDokumen3 halamanBahan Ajar Lesson StudyRu'yatut RBelum ada peringkat
- Forum BetonDokumen5 halamanForum Betonarumaiza kurniawanBelum ada peringkat
- Jenis-Jenis SPLDokumen3 halamanJenis-Jenis SPLarumaiza kurniawanBelum ada peringkat
- Quis 11 Anstruk 2 - Satria Eka DayaDokumen9 halamanQuis 11 Anstruk 2 - Satria Eka DayaAndika Hendra PBelum ada peringkat
- Hal 2Dokumen3 halamanHal 2arumaiza kurniawanBelum ada peringkat
- Fahrykurniawan - Tugas Besar 2Dokumen7 halamanFahrykurniawan - Tugas Besar 2arumaiza kurniawanBelum ada peringkat
- FORUM8Dokumen3 halamanFORUM8arumaiza kurniawanBelum ada peringkat
- Fahrykurniawan - Tugas Besar 2Dokumen7 halamanFahrykurniawan - Tugas Besar 2arumaiza kurniawanBelum ada peringkat
- Quis TM 13Dokumen1 halamanQuis TM 13arumaiza kurniawanBelum ada peringkat
- TB 1Dokumen3 halamanTB 1arumaiza kurniawan100% (1)
- Arumaiza - 55720010008 - MTK TerapanDokumen7 halamanArumaiza - 55720010008 - MTK Terapanarumaiza kurniawan100% (1)
- 16 - Educação e Função Dos Médiuns (Versão-Jan08)Dokumen3 halaman16 - Educação e Função Dos Médiuns (Versão-Jan08)tchauradar100% (1)
- Forum&Quiz 6 Fahry Kurniawan 41118110049 Mtk3Dokumen3 halamanForum&Quiz 6 Fahry Kurniawan 41118110049 Mtk3arumaiza kurniawanBelum ada peringkat
- TB 1Dokumen3 halamanTB 1arumaiza kurniawan100% (1)
- Metode Subtitusi BalikDokumen2 halamanMetode Subtitusi Balikarumaiza kurniawanBelum ada peringkat
- 2020 Tugas 2Dokumen2 halaman2020 Tugas 2arumaiza kurniawanBelum ada peringkat
- Fahry Kurniawan - 41118110049 - Quis TM 1Dokumen3 halamanFahry Kurniawan - 41118110049 - Quis TM 1arumaiza kurniawanBelum ada peringkat
- Fahry Kurniawan - 411118110049 - AnalisaStruktur3 - Quiz5Dokumen3 halamanFahry Kurniawan - 411118110049 - AnalisaStruktur3 - Quiz5arumaiza kurniawanBelum ada peringkat
- FAHRY KURNIAWAN - 41118110049 - Quis TM 1Dokumen3 halamanFAHRY KURNIAWAN - 41118110049 - Quis TM 1arumaiza kurniawanBelum ada peringkat
- Tugas 2 - Matriks Dan VektorDokumen2 halamanTugas 2 - Matriks Dan Vektorarumaiza kurniawanBelum ada peringkat
- Fahry Kurniawan - 41118110049 - Quis TM 1Dokumen3 halamanFahry Kurniawan - 41118110049 - Quis TM 1arumaiza kurniawanBelum ada peringkat
- Forum & Quiz 6 Fahry Kurniawan - 41118110049Dokumen3 halamanForum & Quiz 6 Fahry Kurniawan - 41118110049arumaiza kurniawanBelum ada peringkat
- Fahry Kurniawan - 411118110049 - AnalisaStruktur3 - Quiz3Dokumen4 halamanFahry Kurniawan - 411118110049 - AnalisaStruktur3 - Quiz3arumaiza kurniawanBelum ada peringkat
- Metoda Numerik Lanjut - Tugas 1Dokumen7 halamanMetoda Numerik Lanjut - Tugas 1arumaiza kurniawanBelum ada peringkat
- Perhitungan Tugas 2Dokumen17 halamanPerhitungan Tugas 2arumaiza kurniawanBelum ada peringkat