Anda mungkin juga menyukai
- bab 3 detDokumen19 halamanbab 3 detkusumahadieaBelum ada peringkat
- MastergeonalDokumen54 halamanMastergeonalRoby UdinBelum ada peringkat
- Smart SolutionDokumen12 halamanSmart SolutionDodit PradiptaBelum ada peringkat
- Representasi Graf, Graf Isomorfik, Graf Plannar Dan Graf DualDokumen44 halamanRepresentasi Graf, Graf Isomorfik, Graf Plannar Dan Graf DualRisasi Febriani Ganda100% (6)
- Materi Kimia KuantumDokumen21 halamanMateri Kimia KuantumThita Nuryanti JabanBelum ada peringkat
- Determinan Kelompok 3 FixDokumen49 halamanDeterminan Kelompok 3 FixAsdfghjklBelum ada peringkat
- Fix ISOMETRIDokumen15 halamanFix ISOMETRInitaBelum ada peringkat
- GEOMETRI ANALITIKDokumen50 halamanGEOMETRI ANALITIKرضون رفيددن0% (1)
- Pengantar Analisis Real IDokumen146 halamanPengantar Analisis Real IHusna Arifa100% (4)
- Analisis Bab1 Bab2 PDFDokumen46 halamanAnalisis Bab1 Bab2 PDFImelda RimoBelum ada peringkat
- Makalah Analisa Vektor Tentang Integral 2Dokumen19 halamanMakalah Analisa Vektor Tentang Integral 2Intan Kertiyani100% (2)
- Deret Geometri Tak HinggaDokumen6 halamanDeret Geometri Tak HinggaAlvin ArthaBelum ada peringkat
- Modul Matematika - FX Aven (9113090009)Dokumen59 halamanModul Matematika - FX Aven (9113090009)Ai'Kizuki Dei Arks SinclairBelum ada peringkat
- Makalah Kelompok 1 TrigonometriDokumen26 halamanMakalah Kelompok 1 TrigonometriGITA FADILABelum ada peringkat
- LINGKARAN DAN SFERDokumen36 halamanLINGKARAN DAN SFERTri WulandariBelum ada peringkat
- Geometri Analitik Bidang - LingkaranDokumen20 halamanGeometri Analitik Bidang - Lingkaranshaeisel50% (2)
- 5 HP Bersyarat - KondisiDokumen15 halaman5 HP Bersyarat - KondisiLaura JattiBelum ada peringkat
- KRIGING METODEDokumen34 halamanKRIGING METODEFahrul Razi RustamBelum ada peringkat
- SHSGKGGSDGSDGDSGSDGSDGSDGDSGDokumen78 halamanSHSGKGGSDGSDGDSGSDGSDGSDGDSGL LubizBelum ada peringkat
- Soal Bilangan Kompleks MatematikaDokumen55 halamanSoal Bilangan Kompleks MatematikaRaissa Vedayanti100% (7)
- Sistem Persamaan LinearDokumen9 halamanSistem Persamaan LinearAndri susantoBelum ada peringkat
- Tentukan Dimensi BesaranDokumen18 halamanTentukan Dimensi Besaranmuhammad afrizalBelum ada peringkat
- Geometri Analitik Bidang - LingkaranDokumen20 halamanGeometri Analitik Bidang - LingkaranSiti MardhiyahBelum ada peringkat
- Kelompok 2 ISOMETRIDokumen16 halamanKelompok 2 ISOMETRIAnonymous 09UsapuM3QBelum ada peringkat
- Soal Olimpiade Matematika Seleksi Tingkat Propinsi TahunDokumen7 halamanSoal Olimpiade Matematika Seleksi Tingkat Propinsi TahunrezkyisalBelum ada peringkat
- Makalah MTKDokumen15 halamanMakalah MTKTaufik NurhidayatBelum ada peringkat
- Purcell Hasil Kali SilangDokumen13 halamanPurcell Hasil Kali SilangFebii AlamsyahBelum ada peringkat
- Komputasi Grafik ResumeDokumen12 halamanKomputasi Grafik Resume2A012Gian Vilcan PatraBelum ada peringkat
- Ale (Lapangan, Merentang, Subruang) Kelompok 2Dokumen22 halamanAle (Lapangan, Merentang, Subruang) Kelompok 2Lisa Laila RafidaBelum ada peringkat
- Analisis Kompleks - 3Dokumen6 halamanAnalisis Kompleks - 3Arifia MisbakhBelum ada peringkat
- DETERMINAN MATRIKSDokumen13 halamanDETERMINAN MATRIKSdwi mahadiyanBelum ada peringkat
- Garis Lurus (Lanjutan)Dokumen5 halamanGaris Lurus (Lanjutan)Arsista ArdiBelum ada peringkat
- Matriks dan Penerapannya dalam Bidang EkonomiDokumen10 halamanMatriks dan Penerapannya dalam Bidang EkonomiTaufik Nur HidayatBelum ada peringkat
- Bab 3 - ME - Fungsi LinierDokumen11 halamanBab 3 - ME - Fungsi Linierhaura0% (1)
- Barisan Dan DeretDokumen15 halamanBarisan Dan DereteralcaemBelum ada peringkat
- DETERMINAN MATRIKS 3x3Dokumen12 halamanDETERMINAN MATRIKS 3x3Nur IsramiyantiBelum ada peringkat
- 2 DeterminanDokumen25 halaman2 DeterminanAisyahBelum ada peringkat
- Alin Part 3 - (Determinan Matriks)Dokumen30 halamanAlin Part 3 - (Determinan Matriks)fahrulBelum ada peringkat
- Pertemuan 5 - Persamaan Garis Dan Garis Lurus (Lanjutan) PDFDokumen5 halamanPertemuan 5 - Persamaan Garis Dan Garis Lurus (Lanjutan) PDFDettchanBelum ada peringkat
- Baris & DeretDokumen12 halamanBaris & DeretnahrulitaBelum ada peringkat
- Pengertian TrigonometriDokumen4 halamanPengertian Trigonometrisilvia dwiBelum ada peringkat
- Geometri Pada Bidang - VEKTORDokumen12 halamanGeometri Pada Bidang - VEKTORDahlan ErwinBelum ada peringkat
- Koordinat PolarDokumen34 halamanKoordinat PolarCikgu Adam YusofBelum ada peringkat
- Binomial IlkomDokumen18 halamanBinomial Ilkomroni hamonanganBelum ada peringkat
- KALKULUSDokumen15 halamanKALKULUSElbrigita Yohana EY LadaBelum ada peringkat
- SELEKSI_TINGKAT_PROPINSIDokumen9 halamanSELEKSI_TINGKAT_PROPINSIYacawBelum ada peringkat
- Operasi Limit Dan Kekontinuan Fungsi VektorDokumen24 halamanOperasi Limit Dan Kekontinuan Fungsi VektorMuazir Tukloy100% (1)
- Bilangan Kompleks-NewDokumen39 halamanBilangan Kompleks-NewJasson Darrian SalimBelum ada peringkat
- MATEMATIKA UNTUK MESIN DAN PENGERJAAN LOGAM Dimas Wahyu Nur PratamaDokumen33 halamanMATEMATIKA UNTUK MESIN DAN PENGERJAAN LOGAM Dimas Wahyu Nur PratamaKaka AlmaydaBelum ada peringkat
- Materi Bilangan BulatDokumen15 halamanMateri Bilangan BulatdeniBelum ada peringkat
- MENGHUBUNGKAN PERSAMAAN DAN GARIS LURUSDokumen7 halamanMENGHUBUNGKAN PERSAMAAN DAN GARIS LURUSeki tirtana zamzaniBelum ada peringkat
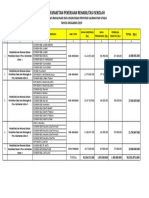
- Pemaketan Rehab Sekolah 2019 NewDokumen1 halamanPemaketan Rehab Sekolah 2019 NewRahmat YaminBelum ada peringkat
- PAUD4306 Tugas2Dokumen3 halamanPAUD4306 Tugas2Rahmat YaminBelum ada peringkat
- Daftar Acara RandyDokumen2 halamanDaftar Acara RandyRahmat YaminBelum ada peringkat
- Rahmat Yamin TRK Lortay CGK Flight OriginatingDokumen3 halamanRahmat Yamin TRK Lortay CGK Flight OriginatingRahmat YaminBelum ada peringkat
- Undangan WalimahDokumen8 halamanUndangan WalimahSofi BaeBelum ada peringkat
- Ken IngDokumen2 halamanKen IngRahmat YaminBelum ada peringkat
- Perataan Bersyarat1Dokumen4 halamanPerataan Bersyarat1Rahmat YaminBelum ada peringkat
- Perataan Bersyarat1Dokumen4 halamanPerataan Bersyarat1Rahmat YaminBelum ada peringkat
- Mengkaji Perbedaan Diagonalisasi Matriks Atas Field Dan Matriks Atas Ring KomutatifDokumen8 halamanMengkaji Perbedaan Diagonalisasi Matriks Atas Field Dan Matriks Atas Ring KomutatifMuhib TingkirBelum ada peringkat