Anda mungkin juga menyukai
- Pertemuan 3Dokumen21 halamanPertemuan 3Daiasa ElcBelum ada peringkat
- Komponen Sepeda Motor ListrikDokumen43 halamanKomponen Sepeda Motor ListrikGaguk KusnandarBelum ada peringkat
- Apa Itu Motor BLDCDokumen2 halamanApa Itu Motor BLDCJunabBelum ada peringkat
- Laporan Praktikum Rangkaian H-Bridge KontrolDokumen16 halamanLaporan Praktikum Rangkaian H-Bridge KontrolAmsalSilabanBelum ada peringkat
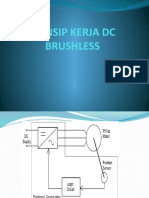
- Prinsip Kerja DC BrushlessDokumen23 halamanPrinsip Kerja DC BrushlessGhozi PratamBelum ada peringkat
- LegowoDokumen34 halamanLegoworahmat teaBelum ada peringkat
- MESIN-MESIN LISTRIK MATERI Ke 2-3 OKDokumen23 halamanMESIN-MESIN LISTRIK MATERI Ke 2-3 OKMantek Rpmle SamsruBelum ada peringkat
- Menganalisis Aruhan ElektromagnetDokumen28 halamanMenganalisis Aruhan ElektromagnetzitawongBelum ada peringkat
- RobotikaDokumen7 halamanRobotikaAnnisa Yasmin Noor ZainBelum ada peringkat
- Materi 1 SISTEM PENGISIAN SEPEDA MOTORDokumen6 halamanMateri 1 SISTEM PENGISIAN SEPEDA MOTORroliBelum ada peringkat
- Pengereman Motor Induksi Dengan Injeksi Sumber DCDokumen22 halamanPengereman Motor Induksi Dengan Injeksi Sumber DCGregorius GradyBelum ada peringkat
- MotorDokumen9 halamanMotorMahasan AhmadBelum ada peringkat
- Prinsip Kerja Motor Arus SearahDokumen9 halamanPrinsip Kerja Motor Arus SearahWahyu Septriandi SaktiBelum ada peringkat
- Prinsip Kerja Generator DCDokumen2 halamanPrinsip Kerja Generator DCYuli athiyaBelum ada peringkat
- Prinsip Kerja DCDokumen8 halamanPrinsip Kerja DCyogi vernandoBelum ada peringkat
- Prinsip Kerja Motor Listrik DC Dan ACDokumen10 halamanPrinsip Kerja Motor Listrik DC Dan ACTeguh PradnyanaBelum ada peringkat
- BLDC Teori-1 PDFDokumen15 halamanBLDC Teori-1 PDFGumilarHarsyaPutraBelum ada peringkat
- PEL79MotorDan PenjanaDokumen7 halamanPEL79MotorDan PenjanaRosmini Abdul RahmanBelum ada peringkat
- Sistem Kendali MFHDokumen11 halamanSistem Kendali MFHparhan hatadiBelum ada peringkat
- QwerDokumen27 halamanQwerDidi SupraptoBelum ada peringkat
- Motor DC Brushless Tiga Fasa-Satu KutubDokumen6 halamanMotor DC Brushless Tiga Fasa-Satu KutubMaula AhmadBelum ada peringkat
- Induksi Elektro-Wps OfficeDokumen8 halamanInduksi Elektro-Wps OfficeI.DZULFIQOR ASKARULHAQBelum ada peringkat
- Materi 4. GeneratorDokumen73 halamanMateri 4. GeneratorRex LapisBelum ada peringkat
- Motor DC BrushlessDokumen8 halamanMotor DC BrushlessLuthvi Okiariandi100% (1)
- Arus Listrik ACDokumen11 halamanArus Listrik ACadamizzuddinBelum ada peringkat
- Makalah Elda AC DriveDokumen18 halamanMakalah Elda AC DriveTri JuniardiBelum ada peringkat
- Cara Kerja BLDC MotorDokumen3 halamanCara Kerja BLDC MotorOpikBelum ada peringkat
- Teori Tambahan MesinDokumen36 halamanTeori Tambahan MesinRianti TampubolonBelum ada peringkat
- BLDC JobSheetTKendali ALMTDokumen8 halamanBLDC JobSheetTKendali ALMTAl MtdrsBelum ada peringkat
- Rancang Bangun Penggerak Daya Motor BrusDokumen18 halamanRancang Bangun Penggerak Daya Motor Brusakhmad wirantoBelum ada peringkat
- AlternatorDokumen9 halamanAlternatorkfi MandianginBelum ada peringkat
- Makalah UTSDokumen45 halamanMakalah UTSEgiaBelum ada peringkat
- Kelompok 2 - CycloconverterDokumen20 halamanKelompok 2 - CycloconverterElektro C'18 UnjaniBelum ada peringkat
- Prinsip Kerja Generator ACDokumen13 halamanPrinsip Kerja Generator ACAbdur RahmanBelum ada peringkat
- Motor Listrik BLDCDokumen6 halamanMotor Listrik BLDChabibBelum ada peringkat
- Materi 2. Prinsip Kerja Motor ListrikDokumen4 halamanMateri 2. Prinsip Kerja Motor ListrikDaniel MallAzzBelum ada peringkat
- Bab Motor DC Rev02Dokumen41 halamanBab Motor DC Rev02iotaupsilonBelum ada peringkat
- Motor KapasitorDokumen26 halamanMotor KapasitorAdi SusantoBelum ada peringkat
- Mesin DCDokumen15 halamanMesin DCAntony ChristianBelum ada peringkat
- Aktuator Berbasis ArduinoDokumen10 halamanAktuator Berbasis ArduinoEdwin Syihab HariantoBelum ada peringkat
- Single Acting Cylinder Dan Double Acting CylinderDokumen7 halamanSingle Acting Cylinder Dan Double Acting Cylindermafud0% (1)
- Motor StepperrrDokumen4 halamanMotor StepperrrVipBelum ada peringkat
- Pendahuluan Motor DC ShuntDokumen3 halamanPendahuluan Motor DC ShuntAhmad Ridhoansyah Nur WibowoBelum ada peringkat
- Laporan Akhir Praktikum MOTOR AC 1 FASADokumen23 halamanLaporan Akhir Praktikum MOTOR AC 1 FASALouisBelum ada peringkat
- SOAL Pengisian Sepeda Motor Dan PembahasanDokumen11 halamanSOAL Pengisian Sepeda Motor Dan PembahasanDian Pasa MeidaBelum ada peringkat
- Mesin ListrikDokumen8 halamanMesin ListrikVarano TugaBelum ada peringkat
- Generator AcDokumen7 halamanGenerator Acyosaria oktariBelum ada peringkat
- Teori CycloconverterDokumen5 halamanTeori CycloconverterDicky AriBelum ada peringkat
- Pengertian Dan Prinsip Kerja Generator ACDokumen4 halamanPengertian Dan Prinsip Kerja Generator ACroger that100% (2)
- BAB V Sistem PengisianDokumen11 halamanBAB V Sistem PengisianRiyan Pate KamangBelum ada peringkat
- Motor Induksi Satu FasaDokumen12 halamanMotor Induksi Satu FasaNfa FeriBelum ada peringkat
- ElectromagnetDokumen10 halamanElectromagnetbudi_ummBelum ada peringkat
- Quadrian Adiputranto Ir 04122019223055 Listrik Instrumen PesBang Kuliah 9,10 11 PDFDokumen20 halamanQuadrian Adiputranto Ir 04122019223055 Listrik Instrumen PesBang Kuliah 9,10 11 PDFRaihan Farhan RamadhanBelum ada peringkat