0% menganggap dokumen ini bermanfaat (0 suara)
187 tayangan11 halamanModul 11
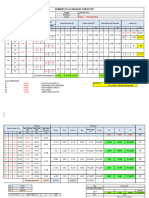
Modul ini membahas tentang pengukuran poligon tertutup, meliputi langkah-langkah hitungan, peralatan dan bahan yang digunakan, prosedur pengukuran, dan pengolahan data hasil pengukuran. Langkah-langkah hitungan meliputi penjumlahan sudut, koreksi sudut, dan perhitungan azimuth tiap sisi. Peralatan utama adalah theodolit dan total station beserta aksesoris pendukungnya. Pengukuran dilakukan dengan mengukur sudut dan
Diunggah oleh
ᯇᯒ᯲ᯑᯬᯘᯪHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai DOCX, PDF, TXT atau baca online di Scribd
0% menganggap dokumen ini bermanfaat (0 suara)
187 tayangan11 halamanModul 11
Modul ini membahas tentang pengukuran poligon tertutup, meliputi langkah-langkah hitungan, peralatan dan bahan yang digunakan, prosedur pengukuran, dan pengolahan data hasil pengukuran. Langkah-langkah hitungan meliputi penjumlahan sudut, koreksi sudut, dan perhitungan azimuth tiap sisi. Peralatan utama adalah theodolit dan total station beserta aksesoris pendukungnya. Pengukuran dilakukan dengan mengukur sudut dan
Diunggah oleh
ᯇᯒ᯲ᯑᯬᯘᯪHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai DOCX, PDF, TXT atau baca online di Scribd