Anda mungkin juga menyukai
- Analisa Sistem TenagaDokumen115 halamanAnalisa Sistem TenagageradakBelum ada peringkat
- Ast1 Gauss SeidelDokumen8 halamanAst1 Gauss SeidelTasha LeeBelum ada peringkat
- Chapter8Dokumen24 halamanChapter8DoaibuBelum ada peringkat
- Salma Ma'Aly Raihanah Ismah - Rangkaian ACDokumen15 halamanSalma Ma'Aly Raihanah Ismah - Rangkaian ACSalma Ma'aly Raihanah IsmahBelum ada peringkat
- Prob 8 Dan Prob 9Dokumen9 halamanProb 8 Dan Prob 9Daning Kinanti SutamaBelum ada peringkat
- Materi Sistem Kendali Kontinyu 08 AprillDokumen27 halamanMateri Sistem Kendali Kontinyu 08 AprillArneta YulistianiBelum ada peringkat
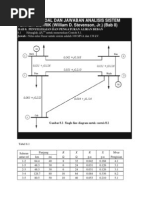
- Kumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Dokumen20 halamanKumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Arief Kurniawan50% (4)
- Laporan Resmi Elka Daya Ac To Ac ConverterDokumen6 halamanLaporan Resmi Elka Daya Ac To Ac ConverterFarhanNaufallBelum ada peringkat
- M Elvan RN - Rangk Trafo 1Dokumen3 halamanM Elvan RN - Rangk Trafo 1fancy boxBelum ada peringkat
- Materi Elektronika Daya Penyearah TerkendaliDokumen15 halamanMateri Elektronika Daya Penyearah TerkendaliMuhammad Alfian33% (3)
- Penguat Kelas BDokumen7 halamanPenguat Kelas BIbud Dwi PrasetyoBelum ada peringkat
- Revinda Azzalia Putri Wijaya - Praktikum Elektronika Nuklir - Laporan Resmi Praktikum Pulse ShapingDokumen13 halamanRevinda Azzalia Putri Wijaya - Praktikum Elektronika Nuklir - Laporan Resmi Praktikum Pulse ShapingRevinda Azzalia Putri WijayaBelum ada peringkat
- Studi Stabilitas Transient Sistem Tenaga Listrik Dengan MetodeDokumen34 halamanStudi Stabilitas Transient Sistem Tenaga Listrik Dengan MetodeMuhammad Andi AgustiantoBelum ada peringkat
- Laporan Praktikum Pemeliharaan Instrumentasi AmplifierDokumen9 halamanLaporan Praktikum Pemeliharaan Instrumentasi AmplifiermompBelum ada peringkat
- Buku ASTDokumen115 halamanBuku ASTBinti MasyrurohBelum ada peringkat
- Laporan Praktikum Sistem KendaliDokumen69 halamanLaporan Praktikum Sistem KendalidilacantikBelum ada peringkat
- Risky Via Feriyanti - P3 - Tugas 3Dokumen21 halamanRisky Via Feriyanti - P3 - Tugas 3rvia feriyantiBelum ada peringkat
- Tugas Ringkasan MateriDokumen41 halamanTugas Ringkasan MateriKairaMilaniFitriaIIBelum ada peringkat
- Makalah - ASTL-1 - Kelompok 10 - Kls-01Dokumen14 halamanMakalah - ASTL-1 - Kelompok 10 - Kls-01Alya Ilmy FadhilahBelum ada peringkat
- Handout RLDokumen98 halamanHandout RLTaufiq TaqimBelum ada peringkat
- Fauzan Dzulfiqar - 191724009 - 3C - TPTL - Laporan Modul 1Dokumen9 halamanFauzan Dzulfiqar - 191724009 - 3C - TPTL - Laporan Modul 13C09FauzanDz -Belum ada peringkat
- Arus Bolak Balik (MP) PDFDokumen13 halamanArus Bolak Balik (MP) PDFJarnawiBelum ada peringkat
- Capacitor BankDokumen9 halamanCapacitor BankkomedimetrotvBelum ada peringkat
- Transistor Kelas A PDFDokumen14 halamanTransistor Kelas A PDFWahyu Hadi SaputraBelum ada peringkat
- LAPORAN Mesin Listrik - Transformator 1 FasaDokumen14 halamanLAPORAN Mesin Listrik - Transformator 1 FasaTri mutiaBelum ada peringkat
- Daya Aktif Reaktif SemuDokumen14 halamanDaya Aktif Reaktif SemuYudha Adhe WidodoBelum ada peringkat
- Topik 2Dokumen5 halamanTopik 2Farhan'zBelum ada peringkat
- k3.j3. Feby PratamaDokumen7 halamank3.j3. Feby PratamaFeby PratamaBelum ada peringkat
- Jobsheet 8Dokumen8 halamanJobsheet 8Kelvin IlferdoBelum ada peringkat
- Soal Asf-2024-Tipe ADokumen2 halamanSoal Asf-2024-Tipe AVio Gustian's channelBelum ada peringkat
- Unit 0 Dan 1Dokumen16 halamanUnit 0 Dan 1RIZAL MULIA INSANIBelum ada peringkat
- Optimasi Automatic Voltage Regulator Avr Pada Multimesin Untuk Mengurangi Osilasi Dengan Metode Linear Quadratic Regulator LQRDokumen8 halamanOptimasi Automatic Voltage Regulator Avr Pada Multimesin Untuk Mengurangi Osilasi Dengan Metode Linear Quadratic Regulator LQRazharBelum ada peringkat
- Elemen Sistem Terkontrol GabunganDokumen4 halamanElemen Sistem Terkontrol GabunganRainaBelum ada peringkat
- 4-TRAFO 3 FASA (Percobaan)Dokumen11 halaman4-TRAFO 3 FASA (Percobaan)Ainun Widi CahyaningrumBelum ada peringkat
- Pendiferensial Dan Pengintegral RCDokumen24 halamanPendiferensial Dan Pengintegral RCsyifaBelum ada peringkat
- 100 - Parameter Dari Elemen Pt2Dokumen4 halaman100 - Parameter Dari Elemen Pt2Rizki Tri PutraBelum ada peringkat
- Untai Gayut WaktuDokumen29 halamanUntai Gayut WaktuKevin Adhela CahyaBelum ada peringkat
- Johan Muhammad Iqbal - AC TO AC Voltage ControllerDokumen9 halamanJohan Muhammad Iqbal - AC TO AC Voltage Controller04 Johan Muhammad IqbalBelum ada peringkat
- Dasar TeoriDokumen6 halamanDasar TeoriMISRAH RAHAYUBelum ada peringkat
- Materi Elektronika Daya Ac RegulatorDokumen14 halamanMateri Elektronika Daya Ac RegulatorMuhammad Alfian100% (1)
- Bab 2Dokumen22 halamanBab 2Poltak MarpaungBelum ada peringkat
- Ghozy Ali Ramadhan - 4EB - ELEMEN PARAMETER PT2Dokumen4 halamanGhozy Ali Ramadhan - 4EB - ELEMEN PARAMETER PT2GhozyBelum ada peringkat
- Osilator 022200020Dokumen21 halamanOsilator 022200020KatherinaBelum ada peringkat
- Praktikum Trafo Arus CTDokumen14 halamanPraktikum Trafo Arus CTErhil AbriansyahBelum ada peringkat
- Rangkaian RLC Hubungan SeriDokumen5 halamanRangkaian RLC Hubungan SeriSiti ZhakiyahBelum ada peringkat
- Krisna Udayana 02 - RangkaianACDokumen37 halamanKrisna Udayana 02 - RangkaianACSeruniPratiwiBelum ada peringkat
- JOB 1. Penyearah Terkendali Pulsa - Tunggal Beban R Dan Campuran R-LDokumen12 halamanJOB 1. Penyearah Terkendali Pulsa - Tunggal Beban R Dan Campuran R-LRendy AnggaraBelum ada peringkat
- Resume Pending Item Transmisi Status Open BPTT Sec 1Dokumen1 halamanResume Pending Item Transmisi Status Open BPTT Sec 1Namir DinBelum ada peringkat
- 11Dokumen1 halaman11Namir DinBelum ada peringkat
- 1Dokumen1 halaman1Namir DinBelum ada peringkat
- Makalah Kelompok IDokumen26 halamanMakalah Kelompok INamir DinBelum ada peringkat
- BA Galian Tanah Keras 140J-1Dokumen3 halamanBA Galian Tanah Keras 140J-1Namir DinBelum ada peringkat
- TUGAS 2 DIKLAT Rio KurniawanDokumen3 halamanTUGAS 2 DIKLAT Rio KurniawanNamir DinBelum ada peringkat