Anda mungkin juga menyukai
- Motor DC SeriDokumen13 halamanMotor DC SeriWildan Muholad100% (1)
- Motor KapasitorDokumen26 halamanMotor KapasitorAdi SusantoBelum ada peringkat
- Makalah Sensor Dan Aktuator Pada IndustriDokumen14 halamanMakalah Sensor Dan Aktuator Pada IndustriArinda Dwi WahyuBelum ada peringkat
- Makalah FixDokumen14 halamanMakalah FixHerlin SetyawanBelum ada peringkat
- MikrokontrolerDokumen9 halamanMikrokontrolerMuh Nur Fatahillah100% (1)
- 3.MAKALAH BLDC MotorDokumen24 halaman3.MAKALAH BLDC Motordanang karuniaBelum ada peringkat
- Makalah Kendali Motor DCDokumen18 halamanMakalah Kendali Motor DCHanif Al FarrasBelum ada peringkat
- Laporan Bengkel PlatDokumen16 halamanLaporan Bengkel PlatHilal WafiBelum ada peringkat
- Kelompok 7 - Mesin Pres Kaleng CatDokumen6 halamanKelompok 7 - Mesin Pres Kaleng CatRfkyalgfhriiBelum ada peringkat
- Proteksi Motor ListrikDokumen15 halamanProteksi Motor ListrikMuhammad Razief FanamyBelum ada peringkat
- Prinsip Kerja Pada Sistem Eksitasi Dengan SikatDokumen1 halamanPrinsip Kerja Pada Sistem Eksitasi Dengan SikatmantapBelum ada peringkat
- AAA Listrik 1 Phasa Dan 3 PhasaDokumen6 halamanAAA Listrik 1 Phasa Dan 3 PhasaAdetya Duta Pratama100% (1)
- Transformator DistribusiDokumen13 halamanTransformator DistribusiKevin AditBelum ada peringkat
- Transistor Dan AplikasinyaDokumen17 halamanTransistor Dan Aplikasinyagusvani aulia putriBelum ada peringkat
- Komponen-Komponen ElektronikaDokumen19 halamanKomponen-Komponen ElektronikaAzukiMoelynBelum ada peringkat
- CoverDokumen57 halamanCoverapriBelum ada peringkat
- Motor ServoDokumen4 halamanMotor ServoKrishna Yuwana100% (1)
- Modul 9 Dasar Konversi Energi Listrik Motor SinkronDokumen11 halamanModul 9 Dasar Konversi Energi Listrik Motor SinkronVania Desy RBelum ada peringkat
- Sistem Pembangkitan Tegangan Generator DCDokumen4 halamanSistem Pembangkitan Tegangan Generator DCNensy Adalah SuendriBelum ada peringkat
- Sistem Kendali Kecepatan Motor DC Berbasis PWM (Group El-7)Dokumen9 halamanSistem Kendali Kecepatan Motor DC Berbasis PWM (Group El-7)fadjar_sensei100% (1)
- Laporan-KP-PLTD-BKS-Nur Khotimah-1707111345Dokumen56 halamanLaporan-KP-PLTD-BKS-Nur Khotimah-1707111345ARI GUNAWANBelum ada peringkat
- Laporan FillingDokumen30 halamanLaporan FillingDewo N uBelum ada peringkat
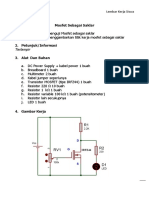
- Jobsheet MOSFET Sebagai SaklarDokumen2 halamanJobsheet MOSFET Sebagai SaklarIrwan SiburianBelum ada peringkat
- Motor StepperDokumen7 halamanMotor StepperRoniAmirChamdani100% (1)
- Mesin Gergaji KayuDokumen78 halamanMesin Gergaji KayuyudaBelum ada peringkat
- Laili Maulidia Salsabila Laporan Fisika 2Dokumen8 halamanLaili Maulidia Salsabila Laporan Fisika 2Difan TriBelum ada peringkat
- Ilmu Bahan Dan PirantiDokumen6 halamanIlmu Bahan Dan PirantiAslan MaxBelum ada peringkat
- Laporan Done Revisi 2Dokumen30 halamanLaporan Done Revisi 2Ali AbdullahBelum ada peringkat
- 2.materisesi1 - Parameter PemotonganDokumen10 halaman2.materisesi1 - Parameter Pemotonganmendung1986Belum ada peringkat
- Malinda Dwi C - 1012 - Acara 6Dokumen14 halamanMalinda Dwi C - 1012 - Acara 6MalindaMdcBelum ada peringkat
- Pengendali Pintu Gerbang Dan Garasi Secara OtomatisDokumen70 halamanPengendali Pintu Gerbang Dan Garasi Secara OtomatisYoga DwipayanaBelum ada peringkat
- 10 - Variable Speed DrveDokumen18 halaman10 - Variable Speed Drverifki wahyudiBelum ada peringkat
- Prinsip Kerja Motor Universal Mudah Dimengerti Dibandingkan Dengan Prinsip Kerja Motor DCDokumen1 halamanPrinsip Kerja Motor Universal Mudah Dimengerti Dibandingkan Dengan Prinsip Kerja Motor DCRizaniBelum ada peringkat
- 2.2. Motor ServoDokumen8 halaman2.2. Motor ServoacapitanoBelum ada peringkat
- Resume Cuk Converter 2019Dokumen6 halamanResume Cuk Converter 2019Delta AliBelum ada peringkat
- Presentasi LiskapDokumen14 halamanPresentasi LiskapfaridBelum ada peringkat
- Persamaan Jumah Lebar Roda Gigi LewisDokumen6 halamanPersamaan Jumah Lebar Roda Gigi LewisDeny Cow PrabowoBelum ada peringkat
- Evaluasi Akhir Semester 2Dokumen3 halamanEvaluasi Akhir Semester 2kristi aniBelum ada peringkat
- Makalah Starting Autotransformator (Autorecovered)Dokumen13 halamanMakalah Starting Autotransformator (Autorecovered)Muhammad Irsyad AwaludinBelum ada peringkat
- Mesin Arus SearahDokumen18 halamanMesin Arus SearahAnang Satyawidjaya100% (1)
- Motor Servo Stepper TERBARUDokumen13 halamanMotor Servo Stepper TERBARURajansonSiregarBelum ada peringkat
- Kelebihan Komunikasi Data Serial Rs 232Dokumen1 halamanKelebihan Komunikasi Data Serial Rs 232DheekongBelum ada peringkat
- Amik Tri Suprianto - 112018060 - Laporan Penyearah Terkendali Dan Kendali Tegangan ACDokumen67 halamanAmik Tri Suprianto - 112018060 - Laporan Penyearah Terkendali Dan Kendali Tegangan ACAmik Tri SupriantoBelum ada peringkat
- Laporan AkhirDokumen28 halamanLaporan AkhirJauzie LastBelum ada peringkat
- Pulse Width Modulation (PWM) PROPTA 13142KB109 PDFDokumen60 halamanPulse Width Modulation (PWM) PROPTA 13142KB109 PDFThebe Lanank SajagadBelum ada peringkat
- Proposal Rancang Bangun Inverter Revisi3Dokumen13 halamanProposal Rancang Bangun Inverter Revisi3OfekBelum ada peringkat
- Laporan Motor InduksiDokumen15 halamanLaporan Motor InduksiSupriBelum ada peringkat
- Proposal Perancangan Sistem ElektronikaDokumen13 halamanProposal Perancangan Sistem ElektronikaDidik PrasetiyoBelum ada peringkat
- Hukum Eksperimental Dan Rangkain SederhanaDokumen13 halamanHukum Eksperimental Dan Rangkain SederhanaAlfredBelum ada peringkat
- Pembuatan Ohm MeterDokumen7 halamanPembuatan Ohm MeternagatozzBelum ada peringkat
- Laporan Praktikum Programable Logic Controller (PLC)Dokumen28 halamanLaporan Praktikum Programable Logic Controller (PLC)Dionisius AKBelum ada peringkat
- Proposal Dana Krtmi 2022 Fixx Dengan BemDokumen21 halamanProposal Dana Krtmi 2022 Fixx Dengan BemDinda KiranaBelum ada peringkat
- Materi Ujian Motor DC UAS 17.1 Teknik MesinDokumen41 halamanMateri Ujian Motor DC UAS 17.1 Teknik MesinEdy Soekonco SuperkipsBelum ada peringkat
- Makalah Pengasutan Motor DCDokumen14 halamanMakalah Pengasutan Motor DCRupaidah HarahapBelum ada peringkat
- Pengereman Motor Induksi Dengan Injeksi Sumber DCDokumen22 halamanPengereman Motor Induksi Dengan Injeksi Sumber DCGregorius GradyBelum ada peringkat
- Praktikum 3Dokumen13 halamanPraktikum 3Agung KrisnaBelum ada peringkat
- Modul Motor ListrikDokumen6 halamanModul Motor ListrikEdho WidyatamaBelum ada peringkat
- RPP Pertemuan 1-2Dokumen12 halamanRPP Pertemuan 1-2selviBelum ada peringkat
- Jurnal 1 PDFDokumen8 halamanJurnal 1 PDFarishardiyanto89Belum ada peringkat
- DTTL - F1B019006 - Ade Setian - Perc4 - Rev 12juni21Dokumen49 halamanDTTL - F1B019006 - Ade Setian - Perc4 - Rev 12juni21Arif Hakam HidayatBelum ada peringkat