Anda mungkin juga menyukai
- Implementasi, Pengujian, PemeliharaanDokumen42 halamanImplementasi, Pengujian, PemeliharaanNarhimo100% (1)
- Makalah Kipas AnginDokumen12 halamanMakalah Kipas AnginDiniOktavBelum ada peringkat
- Laporan Akhir-KELOMPOK 3Dokumen16 halamanLaporan Akhir-KELOMPOK 3Enni M AzzahraBelum ada peringkat
- Alarm Anti MalingDokumen19 halamanAlarm Anti MalingsandraBelum ada peringkat
- Transceiver Prinsip KerjaDokumen8 halamanTransceiver Prinsip KerjaDwi SetiantoBelum ada peringkat
- Laporan Praktikum IDokumen18 halamanLaporan Praktikum IGinanjar BwBelum ada peringkat
- Gerbang LogikaDokumen30 halamanGerbang LogikaMarianiBelum ada peringkat
- Makalah RadarDokumen9 halamanMakalah Radarahmad arifuddinBelum ada peringkat
- Jurnal Praktikum BUTTONDokumen3 halamanJurnal Praktikum BUTTONSinau AsyikBelum ada peringkat
- J3D116036 DimasPutraP RobotPenghindarHalanganDokumen14 halamanJ3D116036 DimasPutraP RobotPenghindarHalanganDimas PutraBelum ada peringkat
- Praktikum 3 Line FollowerDokumen13 halamanPraktikum 3 Line FollowerArham AnwarBelum ada peringkat
- LAPORAN PROYEK Embedded SystemDokumen15 halamanLAPORAN PROYEK Embedded SystemRuth Yolanda GultomBelum ada peringkat
- Laporan Biner Coded DecimalDokumen9 halamanLaporan Biner Coded DecimalBennyMharghaaNstBelum ada peringkat
- Lks Teknologi DigitalDokumen14 halamanLks Teknologi DigitalAmira Rachmatillah100% (1)
- Alat Pendeteksi HujanDokumen2 halamanAlat Pendeteksi HujanTeplox 24Belum ada peringkat
- Perancangan Dan Implementasi Display LCD Menggunakan Modul Vga Pada FpgaDokumen7 halamanPerancangan Dan Implementasi Display LCD Menggunakan Modul Vga Pada FpgaIskandar Setiadi100% (3)
- Perpindahan LED Menggunakan Aplikasi MIDE51Dokumen4 halamanPerpindahan LED Menggunakan Aplikasi MIDE51Herryca RonaldoBelum ada peringkat
- Laporan SOI Modul 2Dokumen20 halamanLaporan SOI Modul 2Gunawan TobingBelum ada peringkat
- Soal&jwbDokumen16 halamanSoal&jwbWigie AgestyaBelum ada peringkat
- Laporan Instalasi ArduinoDokumen11 halamanLaporan Instalasi ArduinoRizky Ahmad FirdausBelum ada peringkat
- Tugas Besar 1 RobotikaDokumen11 halamanTugas Besar 1 RobotikaDessy Iztamia ShemaBelum ada peringkat
- Materi Sistem MinimumDokumen1 halamanMateri Sistem MinimumDani RamdaniBelum ada peringkat
- Laporan Praktikum Pengalamatan Ipv4 Modul 3Dokumen22 halamanLaporan Praktikum Pengalamatan Ipv4 Modul 3Ilham abdulazizBelum ada peringkat
- UTS Genap 2020/2021 Prakt. Dasar Teknik DigitalDokumen5 halamanUTS Genap 2020/2021 Prakt. Dasar Teknik DigitalKeamananOsama Afgan Wahyu Putra Prasetyo.Belum ada peringkat
- Laporan Percobaan Dioda PNDokumen8 halamanLaporan Percobaan Dioda PN042 Nandi Mardiansyah AzhariBelum ada peringkat
- Arsitektur Sistem Mikroprosesor z80Dokumen11 halamanArsitektur Sistem Mikroprosesor z80Luthfy AhmadBelum ada peringkat
- Running Text Microcontroler At89s51Dokumen42 halamanRunning Text Microcontroler At89s51Masabroni WaeBelum ada peringkat
- Modul Iii "Statement Percabangan": Laporan Praktikum Algoritma Dan PemrogramanDokumen28 halamanModul Iii "Statement Percabangan": Laporan Praktikum Algoritma Dan PemrogramanCarissa PutriBelum ada peringkat
- Alarm Maling Menggunakan Rangkaian Bel Dan Pemanfaatan Laser Dengan LDRDokumen11 halamanAlarm Maling Menggunakan Rangkaian Bel Dan Pemanfaatan Laser Dengan LDRKakàk BàikBelum ada peringkat
- Arduino Dan Delphi 7Dokumen6 halamanArduino Dan Delphi 7SitiWatiBelum ada peringkat
- Rangkaian Running TextDokumen13 halamanRangkaian Running TextNaufal AnandaBelum ada peringkat
- Pertemuan-IV RuntunanSekuensial S1IF05ADokumen40 halamanPertemuan-IV RuntunanSekuensial S1IF05ALailatulBelum ada peringkat
- BAB 3 Mikroprosesor - Laporan PraktikumDokumen6 halamanBAB 3 Mikroprosesor - Laporan Praktikumaris efendyBelum ada peringkat
- Soal Latihan Bab II RamaDokumen4 halamanSoal Latihan Bab II RamaHadyan R100% (1)
- Jurnal Kipas Angin OtomatisDokumen19 halamanJurnal Kipas Angin Otomatisarbaa kurniawan100% (1)
- Modul 1-7 Sistem InstrumentasiDokumen62 halamanModul 1-7 Sistem InstrumentasiFaizal abidBelum ada peringkat
- Adc 0804Dokumen2 halamanAdc 0804Fatahillah AtaBelum ada peringkat
- Fungsi Dan Struktur Robot Line FollowerDokumen46 halamanFungsi Dan Struktur Robot Line FollowerAisyah PutriBelum ada peringkat
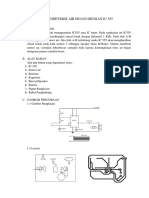
- Alat Pendeteksi Air Hujan Ic 555Dokumen7 halamanAlat Pendeteksi Air Hujan Ic 555Icha Bellyna Putri0% (1)
- Laporan 3Dokumen14 halamanLaporan 3Yurika NuraniBelum ada peringkat
- Laporan Tentang Raspberry Pi3Dokumen5 halamanLaporan Tentang Raspberry Pi3Muhammad FarhanBelum ada peringkat
- Bab 1 MikrokontrollerDokumen21 halamanBab 1 MikrokontrollerRudian Syahrul HiaBelum ada peringkat
- L200190077 - Syarifatul DF - C - Tugas Modul3Dokumen3 halamanL200190077 - Syarifatul DF - C - Tugas Modul3Fauzan AdiansaBelum ada peringkat
- Lab 4 Static RoutingDokumen9 halamanLab 4 Static RoutingAbdul Karim100% (1)
- Laporan 1 LedDokumen12 halamanLaporan 1 LedDio AlvendriBelum ada peringkat
- Contoh Proposal Project Dasar PemrogramanDokumen14 halamanContoh Proposal Project Dasar PemrogramanRendy RoviardiBelum ada peringkat
- Latihan Soal 9-10Dokumen10 halamanLatihan Soal 9-10Sukma SanjayaBelum ada peringkat
- Mengatur Kecerahan LED Dengan PotensiometerDokumen2 halamanMengatur Kecerahan LED Dengan PotensiometerselviaBelum ada peringkat
- Sistem MinimumDokumen1 halamanSistem MinimumAziezah Firzie ItawamhaBelum ada peringkat
- PCBDokumen9 halamanPCBReinasti CahyaBelum ada peringkat
- Fitur Dan Instruksi ProcessorDokumen11 halamanFitur Dan Instruksi ProcessorAwal SaktiBelum ada peringkat
- Tugas GTO Dan MCTDokumen8 halamanTugas GTO Dan MCTFiqri Setia PermanaBelum ada peringkat
- Praktikum Gelombang Sinus Dengan DelphiDokumen10 halamanPraktikum Gelombang Sinus Dengan DelphiComenderBataliaonBlackBelum ada peringkat
- Arus Dan Tegangan ACDokumen11 halamanArus Dan Tegangan ACMega Nurjannah AhmadBelum ada peringkat
- Pin Ppi 8255Dokumen5 halamanPin Ppi 8255phanteqangmahBelum ada peringkat
- 18 Putri Shafa SH - Jobsheet BAB IX (Sensor Ultrasonic) 2Dokumen13 halaman18 Putri Shafa SH - Jobsheet BAB IX (Sensor Ultrasonic) 2Jaebum ChicBelum ada peringkat
- LKPD Sensor UltrasonikDokumen3 halamanLKPD Sensor UltrasonikSaya IkanBelum ada peringkat
- 18 Putri Shafa SH - Jobsheet BAB IX (Sensor Ultrasonic)Dokumen11 halaman18 Putri Shafa SH - Jobsheet BAB IX (Sensor Ultrasonic)Jaebum ChicBelum ada peringkat
- Lampu Belajar Otomatis Menggunakan Sensor Ultrasonik HCDokumen6 halamanLampu Belajar Otomatis Menggunakan Sensor Ultrasonik HCLucy LuBelum ada peringkat
- Mengukur Jarak Dengan Menggunakan Sensor Ultrasonik Dan ArduinoDokumen4 halamanMengukur Jarak Dengan Menggunakan Sensor Ultrasonik Dan Arduinozainal0111Belum ada peringkat
- Sap Pelsos, Disabilitas, Korban Bencana, PengungsiDokumen2 halamanSap Pelsos, Disabilitas, Korban Bencana, PengungsiJannahBelum ada peringkat
- Pertemuan Ke 15 MODAL DALAM MERAIH KESEJAHTERAANDokumen11 halamanPertemuan Ke 15 MODAL DALAM MERAIH KESEJAHTERAANJannahBelum ada peringkat
- Pertemuan 8-1Dokumen35 halamanPertemuan 8-1JannahBelum ada peringkat
- Project 2 Sensor Dan TransduserDokumen6 halamanProject 2 Sensor Dan TransduserJannahBelum ada peringkat
- Soal Uts - Kinematika Dan DinamikaDokumen1 halamanSoal Uts - Kinematika Dan DinamikaJannah100% (1)
- Tugas Mandiri 1 - Resume Bab 1Dokumen1 halamanTugas Mandiri 1 - Resume Bab 1JannahBelum ada peringkat
- Real Time Clock (RTC) DS1307 Atau DS3231 I. Tujuan: Praktik Sensor & Transduser PST 006Dokumen6 halamanReal Time Clock (RTC) DS1307 Atau DS3231 I. Tujuan: Praktik Sensor & Transduser PST 006JannahBelum ada peringkat
- Project 4 Sensor Dan TransduserDokumen5 halamanProject 4 Sensor Dan TransduserJannahBelum ada peringkat
- 1 - Dasar-Dasar Elektronika DayaDokumen7 halaman1 - Dasar-Dasar Elektronika DayaJannahBelum ada peringkat
- Tugas Pengantar Adminitrasi Dan ManajemenDokumen3 halamanTugas Pengantar Adminitrasi Dan ManajemenJannahBelum ada peringkat
- Tugas 1 WirausahaDokumen3 halamanTugas 1 WirausahaJannahBelum ada peringkat
- I011201131 - Raudatul Jannah B.ina 57Dokumen3 halamanI011201131 - Raudatul Jannah B.ina 57JannahBelum ada peringkat