Anda mungkin juga menyukai
- Bab-3-Fungsi AlihDokumen20 halamanBab-3-Fungsi AlihPLAT RBelum ada peringkat
- Transformasi LaplaceDokumen29 halamanTransformasi Laplaceadi ranggaBelum ada peringkat
- Sistem Kendali OTOMATIS Fungsi Alih Dan Diagram BlokDokumen31 halamanSistem Kendali OTOMATIS Fungsi Alih Dan Diagram BlokDwi SurantoBelum ada peringkat
- Model Matematis 1Dokumen30 halamanModel Matematis 1ivan rizaldyBelum ada peringkat
- Watak Dinamis Sensor PDFDokumen41 halamanWatak Dinamis Sensor PDFYovi Herlin SaputraBelum ada peringkat
- Mekanika HamiltonianDokumen11 halamanMekanika HamiltonianTriani ManikBelum ada peringkat
- Minggu 4 DSK4-PRINTDokumen13 halamanMinggu 4 DSK4-PRINTdeviBelum ada peringkat
- DASAR SISTEM KONTROL SMD 2Dokumen19 halamanDASAR SISTEM KONTROL SMD 2Nanda PrasetyoBelum ada peringkat
- PFA 2 - Fungsi TransmisiDokumen29 halamanPFA 2 - Fungsi TransmisiAdmin EngineerBelum ada peringkat
- H062278278Dokumen27 halamanH062278278FiKrie X-friendsBelum ada peringkat
- ODE 4 MhsDokumen157 halamanODE 4 MhsARJUNA WINATABelum ada peringkat
- Persamaan Hamilton-DikonversiDokumen15 halamanPersamaan Hamilton-DikonversiMoh RendiBelum ada peringkat
- Makalah Transformasi Linier PDFDokumen29 halamanMakalah Transformasi Linier PDFAhmad Hafidz MahendraBelum ada peringkat
- Transformasi Laplace Persamaan DifferensialDokumen52 halamanTransformasi Laplace Persamaan DifferensialAndi ayuBelum ada peringkat
- Persamaan Diferensial 2021Dokumen55 halamanPersamaan Diferensial 2021Yohan KrisnandiBelum ada peringkat
- Lembar Jawaban FisikaDokumen40 halamanLembar Jawaban FisikaRidzki Dary0% (1)
- Transformasi Linier PDFDokumen41 halamanTransformasi Linier PDFChristian JeremiaBelum ada peringkat
- BAB 2 Fungsi TransferDokumen27 halamanBAB 2 Fungsi TransferMHD ILHAMBelum ada peringkat
- Konsep Ruang KeadaanDokumen23 halamanKonsep Ruang KeadaanRagil PrasetyaBelum ada peringkat
- Bab 042006 PemodelandananalisispengendalianprosesDokumen63 halamanBab 042006 PemodelandananalisispengendalianprosesSafril Kartika WardanaBelum ada peringkat
- Sistem Kontrol 3Dokumen8 halamanSistem Kontrol 3IbrahimFiiSabilillaahBelum ada peringkat
- 8-Arus Bolak Balik-1 PDFDokumen48 halaman8-Arus Bolak Balik-1 PDFNadya19Belum ada peringkat
- Laplace 1Dokumen41 halamanLaplace 1Michael ThungBelum ada peringkat
- Dinamika Struktur-3Dokumen33 halamanDinamika Struktur-3Cipta AntoBelum ada peringkat
- Model Matematik Sistem FisikDokumen8 halamanModel Matematik Sistem FisikRizki LesmanaBelum ada peringkat
- Model Matematis Sistem DinamisDokumen8 halamanModel Matematis Sistem DinamisPupung Candra PBelum ada peringkat
- Sistem FisisDokumen14 halamanSistem FisisDimas Sandy KurniawanBelum ada peringkat
- Materi GelombangDokumen17 halamanMateri GelombangNia WatiBelum ada peringkat
- 1 (Osilasi Harmonik)Dokumen29 halaman1 (Osilasi Harmonik)Rexsy DuaBelum ada peringkat
- LAB PTE 05 Modul 9 Identifikasi Sistem PDFDokumen7 halamanLAB PTE 05 Modul 9 Identifikasi Sistem PDFke onkBelum ada peringkat
- BAB 3 - Kinematika PartikelDokumen24 halamanBAB 3 - Kinematika PartikelTonnyLieBelum ada peringkat
- KinematikaDokumen29 halamanKinematikaDhihya UrrosyidinBelum ada peringkat
- BAB VIII - Transformasi LinearDokumen8 halamanBAB VIII - Transformasi LinearCelenganthropus100% (4)
- Chapter 3 Laplace TransfromDokumen20 halamanChapter 3 Laplace TransfromardiBelum ada peringkat
- m6-7 Kriteria KinerjaDokumen92 halamanm6-7 Kriteria Kinerjarifkisr011Belum ada peringkat
- Matlan2 IA FeniDokumen19 halamanMatlan2 IA FeniDwi ErmawatiBelum ada peringkat
- GelombangDokumen18 halamanGelombangReggy WijayaBelum ada peringkat
- Falih Dan DblokDokumen3 halamanFalih Dan Dblok20M. Muhyidin YasinBelum ada peringkat
- Kinematika 1 Dan 2Dokumen79 halamanKinematika 1 Dan 2Dhihya UrrosyidinBelum ada peringkat
- Makalah Differential Equations Using Laplace Transforms - Kelompol-3 - 3 KICDokumen21 halamanMakalah Differential Equations Using Laplace Transforms - Kelompol-3 - 3 KICsilmi tsabitaBelum ada peringkat
- 7-Radiasi ElektromagnetikDokumen22 halaman7-Radiasi ElektromagnetikAksa Ardi PartanuBelum ada peringkat
- Teorema Fundamental Pada Kalkulus VektorDokumen16 halamanTeorema Fundamental Pada Kalkulus VektorGabriel YspBelum ada peringkat
- BAB 2. TRANSFORMASI LAPLACE 2.1 Pengertian Transformasi Latar Belakang Penggunaan Transformasi Contoh Sederhana Penggunaan Transformasi-DikonversiDokumen20 halamanBAB 2. TRANSFORMASI LAPLACE 2.1 Pengertian Transformasi Latar Belakang Penggunaan Transformasi Contoh Sederhana Penggunaan Transformasi-DikonversiRakaaBelum ada peringkat
- Gerak HarmonisDokumen12 halamanGerak HarmonisSalsa LarashatiBelum ada peringkat
- Tugas Dasar Sistem KontrolDokumen2 halamanTugas Dasar Sistem KontrolMUHAMMAD HASAN FATHUL ARIFINBelum ada peringkat
- Konsep Dasar Sistem Pengaturan Sistem Pengaturan AdalahDokumen123 halamanKonsep Dasar Sistem Pengaturan Sistem Pengaturan AdalahO'Bell - ChanBelum ada peringkat
- Transformasi LinierDokumen9 halamanTransformasi LinierapriliaBelum ada peringkat
- Reduksi Diagram AlirDokumen123 halamanReduksi Diagram AlirANDI CAPUNGBelum ada peringkat
- Fungsi Transfer, Diagram Blok Dan Respon Sistem Orde 1Dokumen20 halamanFungsi Transfer, Diagram Blok Dan Respon Sistem Orde 1Suci FajriatiBelum ada peringkat
- SI-2131 Mekanika Fluida Dan Hidraulika (Pengenalan Analisis Dimensi-Minggu5)Dokumen20 halamanSI-2131 Mekanika Fluida Dan Hidraulika (Pengenalan Analisis Dimensi-Minggu5)Devina CalistaBelum ada peringkat
- BAB 7 - PDP (Persamaan Gelombang)Dokumen10 halamanBAB 7 - PDP (Persamaan Gelombang)Dodi SaputraBelum ada peringkat
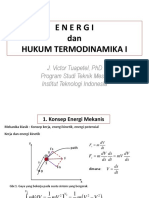
- Energi Dan HK Termodinamika IDokumen20 halamanEnergi Dan HK Termodinamika IIlham AdityaBelum ada peringkat
- Pertemuan 7Dokumen37 halamanPertemuan 7Masjidil AqshaBelum ada peringkat
- GLB Dan GLBBDokumen16 halamanGLB Dan GLBBDevania PutriBelum ada peringkat
- Alin 07 - Transformasi LinearDokumen35 halamanAlin 07 - Transformasi LinearDwi Putri LestariBelum ada peringkat
- Tugas Besar Sistem Kontrol Rahmat ArifDokumen15 halamanTugas Besar Sistem Kontrol Rahmat ArifUBI BULOGBelum ada peringkat