LAPORAN PRAKTIK
SISTEM
MANUFAKTUR
FLEXIBLE
BERBASIS
Disusun Oleh:
Rizky Syarif Hidayatullah 18518249001
PROGRAM STUDI PENDIDIKAN TEKNIK MEKATRONIKA
FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA
2021
Jobsheet Praktik SMF hal-0
PENDIDIKAN TEKNIK MEKATRONIKA
FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA
P. SMF Job ke : 1.
IDENTIFIKASI KOMPONEN DAN
2013, Waktu :
PENGALAMATAN HANDLING STATION 120 menit
THT
A. Tujuan
Setelah selesai praktek peserta dapat:
1. Menyebutkan macam-macam komponen handling station
2. Menjelaskan fungsi masing masing komponen.
3. Menjelaskan cara kerja masing-masing komponen.
4. Menjelaskan cara kerja station.
B. Peralatan
1. Module Module MPS 500 1 unit
2. Modul PLC 1 unit
3. Komputer 1 set
4. Multimeter 1 buah
5. Kabel Penghubung secukupnya
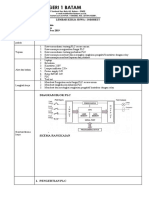
C. Langkah Kerja
1. Amati komponen-komponen yang ada pada station, buka www.festo.com carilah nama
komponen, spesifikasi dan cara kerja komponen tersebut, juga bisa anda cari di
manual book.
2. Catat pengamatan pada tabel berikut.
NAMA
No. GAMBAR SPESIFIKASI CARA KERJA / FUNGSI
KOMPONEN
1. I/O Terminal D : MP-B-AN-E/A-T Sebagai terminal (penyambungan) dari kabel-
kabel yang digunakan dalam mps distributing
2. Air Service Unit D : S-PW-LFR Menyaring dan mengatur tekanan udara yang
masuk ke system mps
3. Connector D : MP2-M-VB Kabel data dari I/O Terminal Syslink
4. Profile Plate D : DE-PP-350B Digunakan untuk tata letak komponen2
pneumatik di mps
Jobsheet Praktik SMF hal-2
5. Holder Module D : MP3-M-AN-BS Dudukan ini digunakan untuk sebagai tempat
Tinggi Standar : 117 mm workpiece
6. Slide Module D : MP3-M-RT250 Digunakan sebagai tempat benda kerja setelah
dipindahkan oleh handling
7. Senslink Transmitt D : MP3-M-SLS Station yang digunakan untuk menerima data
SOEG-L-Q30-P-A-S-2L komunikasi antar mps (menerima data dari mps
sebelumnya)
8. Senslink Receiver D : MP3-M-SLE Station yang digunakan untuk mengiirm data
SOEG-L-Q30-P-A-S-2L komunikasi antar mps (mengirim data ke mps
selanjutnya)
9. CP-Valve Handl D : MP3-CP-GMM Sebagai pengatur pembagian tekanan udara (ke
komponen pneumatic) sesuai dengan program
10. Picalfa Module D : MP3-M-PA-B-BS Sebagai modul pemindahan benda kerja
Linear drive: 600 mm (workpiece) dari modul holder ke module slide
stroke length, 3 end-
position sensors
Flat cylinder: 80 mm stroke
length, 2 end-position
sensors
Pneumatic gripper
Height: 700 mm
Width: 220 mm
Length: 730 mm
11. Proximity Sensor SME-8-S-LED-24 Digunakan untuk mendeteksi keberadaan benda
24vdc
Contact Normally Open
(NO)
12. Inductive proximity SIES-8M Digunakan untuk mendeteksi keberadaan benda
sensor Type PNP logam pada silinder
Normally Open (NO)
contact
13. Silencer U-M5 Peredam suara digunakan untuk mengurangi
kebisingan di lubang buang katup.
Varian
14. Gear Motor Linier Tegangan : 24vdc Digunakan untuk menggerakan atau sebagai gear
drive Arus : 0,31A dari penggerak linier drive
Power : 3,14W
Torque : 80Ncm
Berat 160g
Jobsheet Praktik SMF hal-3
15. Motor Speed Control Dimensi : 22,5mm x 75mm Digunakan untuk mengatur arah arus pada motor
x 105mm
Tegangan operasi:15-35vdc
Arus pada 24vdc : 10mA
16. Pararell Gripper HGP-1—A-B Digunakan untuk meng grip atau menjepit benda
kerja agar dapat dipindahkan dengan Picalfa
Module dari
17. One Way Flow GRLA-M5-QS-4-LF-C Mengatur kecepatan atau banyaknya udara yang
Control Tipe C mengalir ke silinder agar slinder bergerak dengan
aman
18. Flat Pneumatic DZF-18-80-P-A Sebagai bagian dari Picalfa Module untuk
Cylinder Double acting mengangkat benda kerja dengan bantuan gripper
19. Pneumatic Linear DGPL-12—P-A-GF-B Sebagai penggerak linier dari Picalfa Module
Drive Stroke 1-2.000mm
Diameter piston 12mm
20. Control panel Terdapat tombol ON, OFF, Mengatur pengoperasian station dengan manual
MANual, indicator led (step by step)
21. Workpiece Digunakan sebagai benda kerja dari station
3. lamatan input dan output PLC.
4. Catat pada tabel berikut.
No. Alamat Nama NAMA KOMPONEN
Alamat
KOMPONEN INPUT
1. I 136.0 PART_AV Workpiece available
2. I 136.1 1B1 Proximity Magnetik
3. I 136.2 1B2 Proximity Magnetik
4. I 136.3 1B3 Proximity Magnetik
5. I 136.4 2B1 Proximity Magnetik
6. I 136.5 2B2 Proximity Magnetik
7. I 136.6 2B1 Proximity Optik (sensor warna)
8. I 136.7 IP_FI Downstream station
9. I 136.8 Start Tombol push ON (normally Open)
10. I 136.9 Stop Tombol push OFF (normally Open)
11. I 136.10 Swich Switch Manual/Auto
Jobsheet Praktik SMF hal-4
MAN/AUTO
KOMPONEN OUTPUT F
10. Q 136.0 1M1 3/2 Valve Solenoid
11. Q 136.1 1M2 3/2 Valve Solenoid
12. Q 136.2 2M1 5/2 Valve Solenoid
13. Q 136.3 3M1 5/2 Valve Solenoid
14. Q 136.7 IP_N_FO Sensor transtmitter (sender)
15. Q 136.8 Lampu Q1 Indikator lampu
16 Q 136.9 Lampu Q2 Indikator lampu
11. Lihat video MPS 500 pada handling Station
12. Amati proses kerjanya
13. Tuliskan Algoritma station yang diamati.
a. Mulai
b. Kondisi awal, Lampu riset menyala, tidak ada gerakan pada station tidak ada benda kerja
pada holder module
c. Jika tombol start ditekan, station ke posisi inisial (default) : linear drive ke paling kiri,
gripper Open, silinder flat pada posisi atas.
d. Jika terdapat benda kerja pada holder module, lampu start off, silinder flat turun, gripper
open, delay 1 detik, gripper close, silinder flat naik
e. Jika sensor warna mendeteksi benda warna hitam, linear drive geser ke posisi atas slide
hitam yang telah ditentukan,
f. Silinder flat turun, kemudian gripper open, delay 1 detik, silinder flat naik, selanjutnya
linear drive geser ke posisi paling kiri.
g. Kemudian kembali ke point d
h. Sedangkan jika sensor warna mendeteksi benda selain hitam, linear drive geser ke posisi
atas slide merah yang telah ditentukan,
i. Silinder flat turun, kemudian gripper open, delay 1 detik, silinder flat naik, selanjutnya
linear drive geser ke posisi paling kiri.
j. Kemudian kembali ke point d
Jobsheet Praktik SMF hal-5
14. Buatlah diagram sequensial dari station tersebut berdasar proses yang dituliskan.
Jobsheet Praktik SMF hal-6
15. Buatlah deskripsi cara kerja distributing station.
Handling Station merupakan station yang bertugas untuk mendistribusikan benda kerja dari
posisi downstream station ke tempat penyimpanan benda kerja sesuai warna yang telah
ditentukan. Untuk sistem kerjanya ialah saat sensor benda kerja mendeteksi benda kerja maka
handling yang dari awal sudah berada di posisi downstream akan menurunkan grip ke arah
benda kerja lalu mencengkram benda dan menaikan kembali grip yang akan diteruskan dengan
handling bergerak ke posisi sesuai benda kerja yang telah ditentukan di awal,apabila benda
kerja berwarna merah maka handling akan berhenti di posisi downstream station dan akan
menurunkan grip kebawah lalu melepas gripper untuk menaruh benda kerja pada posisi slider
paling ujung
16. Buatlah laporan dari hasil praktik.
Station Handling merupakan station yang mendistribusikan benda kerja sesuai warna yang telah
ditentukan sebelumnya,terdapat dua slider yang telah disediakan untuk pemisah warna benda
kerja,ini merupakan lanjutan dari sistem testing yang apabila good product dia akan dibawa oleh
handling dari posisi penyimpanan benda kerja ke posisi slider yang sudah ditentukan,untuk
sistemnya sendiri terdapat gripper naik turun cengkram dan handling untuk pemindah posisi dari
tempat benda kerja ke slider selanjutnya yaitu tempat penyimpanan benda kerja. Untuk sistem
kerjanya yaitu gripper turun ke bawah untuk mengambil benda kerja (proses gripper) lalu
handling untuk mendistribusikan benda kerja dari tempat A ke tempat slider penyimpanan.
Jobsheet Praktik SMF hal-7
Anda mungkin juga menyukai
- Rizky Syarif H - Jobsheet Identifikasi Testing StationDokumen6 halamanRizky Syarif H - Jobsheet Identifikasi Testing StationRizky SyarifBelum ada peringkat
- MPS500Dokumen6 halamanMPS500Ahmad TaufikBelum ada peringkat
- OPTIMASI SMFDokumen8 halamanOPTIMASI SMFRizky SyarifBelum ada peringkat
- OPTIMASI SMFDokumen8 halamanOPTIMASI SMFRizky SyarifBelum ada peringkat
- RyanJulianto 18518244003 FMS (HANDLINGSTATION)Dokumen7 halamanRyanJulianto 18518244003 FMS (HANDLINGSTATION)Rizky SyarifBelum ada peringkat
- FMS - Identifikasi Testing StationDokumen7 halamanFMS - Identifikasi Testing StationAhmad TaufikBelum ada peringkat
- FMS - Processing StationDokumen9 halamanFMS - Processing StationaphyetsBelum ada peringkat
- Rizky Syarif H - Jobsheet Identifikasi Distributing StationDokumen8 halamanRizky Syarif H - Jobsheet Identifikasi Distributing StationRizky SyarifBelum ada peringkat
- Rizky Syarif H - Jobsheet Identifikasi Sorting StationDokumen9 halamanRizky Syarif H - Jobsheet Identifikasi Sorting StationRizky SyarifBelum ada peringkat
- Silabus Mapel SKEEDokumen8 halamanSilabus Mapel SKEEFilla FidyanaBelum ada peringkat
- Jobsheet PLC FIXDokumen38 halamanJobsheet PLC FIXfadliBelum ada peringkat
- Soal Uts PMKDokumen4 halamanSoal Uts PMKalexBelum ada peringkat
- Dasar PLC Omron Cpm1aDokumen94 halamanDasar PLC Omron Cpm1aHusni Ramdhani100% (1)
- Jobsheet PLCDokumen5 halamanJobsheet PLCFidelis BillyBelum ada peringkat
- MENGUKUR JARAK DENGAN SENSOR ULTRASONIKDokumen8 halamanMENGUKUR JARAK DENGAN SENSOR ULTRASONIKRonBelum ada peringkat
- Rangkaian Pengunci on-OfF Dengan Timer - Praktik 3Dokumen5 halamanRangkaian Pengunci on-OfF Dengan Timer - Praktik 3HaruBelum ada peringkat
- Silabus Mapel Kontrol Elektromekanik Kelas XIIDokumen8 halamanSilabus Mapel Kontrol Elektromekanik Kelas XIIRoyyanFaizalMajidBelum ada peringkat
- Jobsheet Elektropneumatik 1Dokumen1 halamanJobsheet Elektropneumatik 1tedi ruswandiBelum ada peringkat
- Jobsheet Sistem Mekatronik Berbasis CaeDokumen8 halamanJobsheet Sistem Mekatronik Berbasis CaeIntan R DeviBelum ada peringkat
- CAPAIAN PEMBELAJARAN Fase FDokumen4 halamanCAPAIAN PEMBELAJARAN Fase FMuhamad SolihinBelum ada peringkat
- Materi Pengendali Sistem RobotikDokumen4 halamanMateri Pengendali Sistem RobotikDani RamdaniBelum ada peringkat
- Modul Ajar DDTE - Komponen Aktif-PasifDokumen53 halamanModul Ajar DDTE - Komponen Aktif-PasifbudiBelum ada peringkat
- Job 3Dokumen13 halamanJob 3Meri YantoBelum ada peringkat
- SOAL PENGENDALIAN SISTEM DIGITALDokumen5 halamanSOAL PENGENDALIAN SISTEM DIGITALzikry al ayyubiBelum ada peringkat
- Jobsheet Sensor LDRDokumen3 halamanJobsheet Sensor LDRAan Synster100% (1)
- Modul Ajar Ske XiDokumen14 halamanModul Ajar Ske XiNur Muhammad Fadli100% (1)
- JOB MPS RevisiDokumen92 halamanJOB MPS RevisiDimasBelum ada peringkat
- Jobsheet Sistem RobotikDokumen9 halamanJobsheet Sistem RobotikIntan R DeviBelum ada peringkat
- Job Sheet 9 ATSDokumen7 halamanJob Sheet 9 ATSRiski AdiBelum ada peringkat
- MENGENAL PLCDokumen62 halamanMENGENAL PLCNur Kholifah Hidayah0% (1)
- RPP SMK MekatronikaDokumen4 halamanRPP SMK MekatronikaRizky SyarifBelum ada peringkat
- ATP Pemeliharaan Dan Perbaikan Peralatan Elektronika Industri-LukmanDokumen5 halamanATP Pemeliharaan Dan Perbaikan Peralatan Elektronika Industri-LukmanLukman AriyantoBelum ada peringkat
- Jobsheet Elind Dle 4.1Dokumen4 halamanJobsheet Elind Dle 4.1Ruslan HaryandiBelum ada peringkat
- Soal Sistem Kendali Elektronik Kelas XI TEIDokumen5 halamanSoal Sistem Kendali Elektronik Kelas XI TEILinda Hidayati100% (1)
- RPP Sistem Pengendali ElektronikDokumen8 halamanRPP Sistem Pengendali ElektronikIntan R Devi67% (3)
- Pengertian RelayDokumen2 halamanPengertian RelayAgus PrijantoBelum ada peringkat
- Soal - Soal Sistem Kontrol Elektromekanik Dan Elektronik, XI TOI TEKNIK LISTRIKDokumen5 halamanSoal - Soal Sistem Kontrol Elektromekanik Dan Elektronik, XI TOI TEKNIK LISTRIKFadil100% (1)
- FMS - Testing StationDokumen10 halamanFMS - Testing Stationaphyets100% (1)
- TEKNIK INSTALASI LISTRIKDokumen6 halamanTEKNIK INSTALASI LISTRIKFikri Fawzan Alfaridzi100% (2)
- Sistim Kendali AnalogDokumen20 halamanSistim Kendali AnalogWidyVhiantii Al' Izzah25% (4)
- KARTU SOAL Power Supply 2015Dokumen16 halamanKARTU SOAL Power Supply 2015fransiskareniwijayanBelum ada peringkat
- Perekayasaan Sistem Robotik PDFDokumen217 halamanPerekayasaan Sistem Robotik PDFAfrian Rizza0% (1)
- SMART RELAY ZELIO LOGIC SPECIFICATIONSDokumen17 halamanSMART RELAY ZELIO LOGIC SPECIFICATIONSgempur rs50% (2)
- Modul SolderingDokumen10 halamanModul SolderingFauzi NugrohoBelum ada peringkat
- Smart RelayDokumen8 halamanSmart RelayRizki MeliasariBelum ada peringkat
- MODUL PLC CP1E UPDATE SiapDokumen40 halamanMODUL PLC CP1E UPDATE SiapRykha Avadian WahyudiBelum ada peringkat
- Modul Ajar PLC PDFDokumen14 halamanModul Ajar PLC PDFBayu WahyudiBelum ada peringkat
- SEGMENT DISPLAYDokumen2 halamanSEGMENT DISPLAYRADEN DIAZ SUKMA LAKSANA PUTRABelum ada peringkat
- Soal - Soal PLCDokumen5 halamanSoal - Soal PLCMarthinus Pasangallo100% (1)
- KI-KD Pembuatan & Pemlharaan Peralatan Elektronik-Kelas XIIDokumen3 halamanKI-KD Pembuatan & Pemlharaan Peralatan Elektronik-Kelas XIICah PhuputBelum ada peringkat
- Konsep Fisika Dasar PneumatikDokumen19 halamanKonsep Fisika Dasar PneumatikSugiari100% (3)
- Modul Ajar Xi Titl Elemen 2 Versi 2022Dokumen25 halamanModul Ajar Xi Titl Elemen 2 Versi 2022kurikulum stekmalBelum ada peringkat
- Jobsheet Star Delta ManualDokumen5 halamanJobsheet Star Delta ManualRashif Farhan100% (2)
- Soal Teknik Kontrol XiDokumen11 halamanSoal Teknik Kontrol XiIrfan Aminudin100% (3)
- RPP Sensor Dan AktuatorDokumen15 halamanRPP Sensor Dan Aktuatorfajar100% (1)
- 4 Mapel (Pre, Spe, PSR, P4e)Dokumen4 halaman4 Mapel (Pre, Spe, PSR, P4e)Fajar YTBelum ada peringkat
- PROXIMITY SENSORDokumen19 halamanPROXIMITY SENSORDesi Azmarianty100% (1)
- RyanJulianto 18518244003 FMSDokumen7 halamanRyanJulianto 18518244003 FMSRizky SyarifBelum ada peringkat
- SMF Jobsheet 6Dokumen7 halamanSMF Jobsheet 6Ahmad TaufikBelum ada peringkat
- Laprak4 Angga PMMMDokumen11 halamanLaprak4 Angga PMMMAngga Ria SyahputraBelum ada peringkat
- Modul Untuk PelatihanGuruSMKDokumen53 halamanModul Untuk PelatihanGuruSMKAkhmadRiyantoBelum ada peringkat
- DETEKSI GERAKDokumen11 halamanDETEKSI GERAKReyhan AdamBelum ada peringkat
- Sensor ApiDokumen12 halamanSensor ApiRizky SyarifBelum ada peringkat
- 5 Labsheet Sound ActivationDokumen14 halaman5 Labsheet Sound ActivationRizky SyarifBelum ada peringkat
- 4 Labsheet MQ-7Dokumen12 halaman4 Labsheet MQ-7Rizky SyarifBelum ada peringkat
- Cara Memasukkan Kode Numerik Secara LangsungDokumen11 halamanCara Memasukkan Kode Numerik Secara LangsungRizky SyarifBelum ada peringkat
- Proses Setting Simulator Pada SSCNCDokumen10 halamanProses Setting Simulator Pada SSCNCRizky SyarifBelum ada peringkat
- 7 Jobsheet Kelembapan TanahDokumen14 halaman7 Jobsheet Kelembapan TanahIvanBelum ada peringkat
- 1 Labsheet JoystickDokumen13 halaman1 Labsheet JoystickRizky SyarifBelum ada peringkat
- Labsheet 02 Rev4Dokumen8 halamanLabsheet 02 Rev4Mona WulansariBelum ada peringkat
- 2 Labsheet ReedSwitch-dikonversiDokumen10 halaman2 Labsheet ReedSwitch-dikonversiAngelia AyuBelum ada peringkat
- Bisnis Revolusi Industri 4.0Dokumen22 halamanBisnis Revolusi Industri 4.0Rizky SyarifBelum ada peringkat
- Labsheet 03 - RS Flip-FlopDokumen5 halamanLabsheet 03 - RS Flip-FlopFeri Fidi WanttobePiratesBelum ada peringkat
- Zerosicks Gergaji Tangan BundarDokumen30 halamanZerosicks Gergaji Tangan BundarAlfi BachtiarBelum ada peringkat
- RPP Gerbang LogikaDokumen8 halamanRPP Gerbang LogikaDimasBelum ada peringkat
- Zerosicks RSDokumen187 halamanZerosicks RSRizky SyarifBelum ada peringkat
- Rizky Syarif H - Jobsheet Identifikasi Distributing StationDokumen8 halamanRizky Syarif H - Jobsheet Identifikasi Distributing StationRizky SyarifBelum ada peringkat
- 1ppt Bisnis Revolusi Industri 4.0Dokumen8 halaman1ppt Bisnis Revolusi Industri 4.0Rizky SyarifBelum ada peringkat
- Modul Manajemen Industri Muhal PDFDokumen151 halamanModul Manajemen Industri Muhal PDFHesti Vini 'vichi'Belum ada peringkat
- RyanJulianto 18518244003 FMSDokumen7 halamanRyanJulianto 18518244003 FMSRizky SyarifBelum ada peringkat
- Rizky Syarif H - Jobsheet Identifikasi Sorting StationDokumen9 halamanRizky Syarif H - Jobsheet Identifikasi Sorting StationRizky SyarifBelum ada peringkat
- Lab ViewDokumen41 halamanLab ViewIwan Ruhiyana100% (2)
- Sistem Kendali Elektropneumatik Menggunakan PLCDokumen3 halamanSistem Kendali Elektropneumatik Menggunakan PLCRizky SyarifBelum ada peringkat
- 3 Labsheet FlameDokumen12 halaman3 Labsheet FlameRizky SyarifBelum ada peringkat
- Sistem Kontrol Elektro-PneumatikDokumen8 halamanSistem Kontrol Elektro-PneumatikRizky SyarifBelum ada peringkat