Anda mungkin juga menyukai
- Osilasi HarmonikDokumen8 halamanOsilasi HarmonikFransBelum ada peringkat
- Partikel Yang Bergerak Pada Bidang Miring Yang Dapat DigerakkanDokumen2 halamanPartikel Yang Bergerak Pada Bidang Miring Yang Dapat DigerakkanDevi ThayanBelum ada peringkat
- Penerapan Mekanika LagrangianDokumen9 halamanPenerapan Mekanika Lagrangianzafirah dini marsyaBelum ada peringkat
- Makalah Kelompok 2Dokumen12 halamanMakalah Kelompok 2Ahmad HidayahBelum ada peringkat
- Latihan Soal SoalDokumen3 halamanLatihan Soal Soalahmad mukhlis anshoriBelum ada peringkat
- Tes 1 Fismat I Ganjil 2021-2022Dokumen2 halamanTes 1 Fismat I Ganjil 2021-2022Thunder AnimeBelum ada peringkat
- Soal+Pembahasan FixDokumen14 halamanSoal+Pembahasan FixMiftahWulanBelum ada peringkat
- Perbaikan Uas MekanikaDokumen7 halamanPerbaikan Uas Mekanikahalawa mafia18Belum ada peringkat
- Kel1 Hal15-22 LagrangeDokumen6 halamanKel1 Hal15-22 LagrangeDevi Yulianti WafiahBelum ada peringkat
- Modul-Ajar2 - MT 2020 - SentroidDokumen22 halamanModul-Ajar2 - MT 2020 - SentroidUntuk ZoomBelum ada peringkat
- 04 - Alik Susiyanto - PendulumDokumen6 halaman04 - Alik Susiyanto - Pendulum042FD4TE ALIK SUSIYANTOBelum ada peringkat
- Achmad Qoddri - Ringkasan4 - TRKDokumen3 halamanAchmad Qoddri - Ringkasan4 - TRKAchmad QoddriBelum ada peringkat
- Laporan Konstanta PegasDokumen13 halamanLaporan Konstanta PegasAlya Zahra FauziaBelum ada peringkat
- Makalah Optik ModernDokumen17 halamanMakalah Optik Modernhafizah rahmiBelum ada peringkat
- Konsep-SeismikDokumen5 halamanKonsep-Seismikfakhrizalrisky04Belum ada peringkat
- Dinamika Lagrange Dan Hamilton O L e H PDokumen61 halamanDinamika Lagrange Dan Hamilton O L e H PZainal Abidin MustofaBelum ada peringkat
- Laporan Praktikum PegasDokumen17 halamanLaporan Praktikum PegasTri HandayaningsihBelum ada peringkat
- 07 OsilasiDokumen31 halaman07 OsilasiMuyassarah MaharaniBelum ada peringkat
- 7 GetaranDokumen10 halaman7 Getarannabila safithriBelum ada peringkat
- LAPRAK 1 - Nur 'Ainiyyah Hasni - 4211419032Dokumen17 halamanLAPRAK 1 - Nur 'Ainiyyah Hasni - 4211419032Nur 'Ainiyyah HasniBelum ada peringkat
- GetaranDokumen17 halamanGetaranSerendipityBelum ada peringkat
- Bab Vi Getaran PDFDokumen18 halamanBab Vi Getaran PDFHatta Anugerah50% (2)
- Materi Uts KindemDokumen71 halamanMateri Uts KindemMazinoBelum ada peringkat
- Makalah Teori Relativitas EinsteinDokumen8 halamanMakalah Teori Relativitas EinsteinFajar Wahyu PutraBelum ada peringkat
- Tutorial 2 (Dinamika)Dokumen5 halamanTutorial 2 (Dinamika)fafa raraBelum ada peringkat
- Transformasi Refleksi 1 PDFDokumen2 halamanTransformasi Refleksi 1 PDFHugo BenedictoBelum ada peringkat
- Pembahasan Hardcore GelombangDokumen5 halamanPembahasan Hardcore GelombangMUHAMMAD BINTANG PRAZEGABelum ada peringkat
- Pengertian OsilasiDokumen8 halamanPengertian Osilasinurbaizura100% (1)
- Pengertian OsilasiDokumen8 halamanPengertian OsilasiTyo Hernandess0% (1)
- Up 3Dokumen6 halamanUp 3Renny PanjaitanBelum ada peringkat
- Rita Permata Sari Sitorus (4143121049)Dokumen14 halamanRita Permata Sari Sitorus (4143121049)Rita SitorusBelum ada peringkat
- Transformasi LorentzDokumen7 halamanTransformasi Lorentzrifky 2710Belum ada peringkat
- ID Getaran Bebas Pada Balok KantileverDokumen10 halamanID Getaran Bebas Pada Balok Kantileverisfan ramdhaniBelum ada peringkat
- Matematika - Teknik - Kimia - 2 - Bab 3 Fungsi-Fungsi KhususDokumen3 halamanMatematika - Teknik - Kimia - 2 - Bab 3 Fungsi-Fungsi Khususarinda fsBelum ada peringkat
- 8 Panjang Kurva Dan Luas Permukaan Benda PutarDokumen31 halaman8 Panjang Kurva Dan Luas Permukaan Benda PutarAnrey SetiawanBelum ada peringkat
- Bab 1 Tum 1Dokumen26 halamanBab 1 Tum 1Ari PutraBelum ada peringkat
- Pemodelan Matematika Sistem MekanikDokumen7 halamanPemodelan Matematika Sistem MekanikRosalinda LindaBelum ada peringkat
- Achmad Qoddri - Ringkasan6 - TRKDokumen6 halamanAchmad Qoddri - Ringkasan6 - TRKAchmad QoddriBelum ada peringkat
- Bahan Ajar Gerak Harmonik SederhanaDokumen29 halamanBahan Ajar Gerak Harmonik SederhanaAnieZz Wilujeng TikatiwiLoversBelum ada peringkat
- Solusi 2007Dokumen14 halamanSolusi 2007witarestyBelum ada peringkat
- Tugas 1 Simulasi Sistem MekanikDokumen7 halamanTugas 1 Simulasi Sistem MekanikpenyBelum ada peringkat
- Relasi Dan FungsiDokumen20 halamanRelasi Dan FungsiIsmiyah PalupiBelum ada peringkat
- P1Dokumen22 halamanP1DirgahBelum ada peringkat
- Modul-Ajar2 - MT 2020 - Momen InersiaDokumen21 halamanModul-Ajar2 - MT 2020 - Momen InersiaMuhammad Maftuh Rizky AffandyBelum ada peringkat
- (A-1) Ordinary Differential Equations - First Order ODEDokumen5 halaman(A-1) Ordinary Differential Equations - First Order ODEFelix PrimaBelum ada peringkat
- Fungsi Trigonometri Dan Fungsi InversDokumen16 halamanFungsi Trigonometri Dan Fungsi InversPutri Hasanah HarahapBelum ada peringkat
- 2.1. Analisis TeganganDokumen89 halaman2.1. Analisis TeganganFadlul121Belum ada peringkat
- Rangkuman Getaran BebasDokumen4 halamanRangkuman Getaran Bebasganjar121Belum ada peringkat
- 07 OsilasiDokumen36 halaman07 OsilasiAnanda PrajaBelum ada peringkat
- BAB I-III Kinematika Kuliah-1Dokumen72 halamanBAB I-III Kinematika Kuliah-1EDyBelum ada peringkat
- Getaran Harmonik - Kel 4Dokumen7 halamanGetaran Harmonik - Kel 4Intan AyuBelum ada peringkat
- Resume 1 (Osilasi Harmonis Sederhana)Dokumen5 halamanResume 1 (Osilasi Harmonis Sederhana)Aulia AnnisaBelum ada peringkat
- Gelombang SeismikDokumen14 halamanGelombang SeismikRimaBelum ada peringkat
- Buku Mekanika KumpulanDokumen66 halamanBuku Mekanika KumpulanyudiBelum ada peringkat
- Pegas Shock BreakerDokumen3 halamanPegas Shock BreakerIvandra LatumakulitaBelum ada peringkat
- Pers SchrodingerDokumen23 halamanPers SchrodingerArif DwitarastaaBelum ada peringkat
- T5bab 1 Ubahan-ADokumen1 halamanT5bab 1 Ubahan-AHANIFAHBelum ada peringkat
- Surat Izin PimpinanDokumen1 halamanSurat Izin PimpinanFiki SetiawanBelum ada peringkat
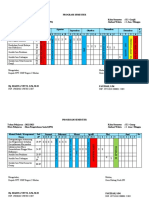
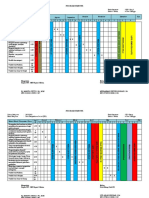
- Semester Program Class Ix FauziahDokumen2 halamanSemester Program Class Ix FauziahIRFANSYAH ANAK SIRAITBelum ada peringkat
- Semester Program Class Vii FauziahDokumen1 halamanSemester Program Class Vii FauziahIRFANSYAH ANAK SIRAITBelum ada peringkat
- RPP Revisi Semester Program Class Vii AisyahDokumen1 halamanRPP Revisi Semester Program Class Vii AisyahIRFANSYAH ANAK SIRAITBelum ada peringkat
- Revisi Semester Program Class Viii AisyahDokumen3 halamanRevisi Semester Program Class Viii AisyahIRFANSYAH ANAK SIRAITBelum ada peringkat
- KEPEMIMPINANDokumen5 halamanKEPEMIMPINANIRFANSYAH ANAK SIRAITBelum ada peringkat
- S-2 - VEKTOR - MEKANIKA - TERAPAN. - MAKALAHpptDokumen32 halamanS-2 - VEKTOR - MEKANIKA - TERAPAN. - MAKALAHpptIRFANSYAH ANAK SIRAITBelum ada peringkat
- Irfansyah Sistem KelistrikanDokumen12 halamanIrfansyah Sistem KelistrikanIRFANSYAH ANAK SIRAITBelum ada peringkat
- Vektor Dimensi 3 1Dokumen16 halamanVektor Dimensi 3 1IRFANSYAH ANAK SIRAITBelum ada peringkat
- Irfansyah TransformatorDokumen34 halamanIrfansyah TransformatorIRFANSYAH ANAK SIRAITBelum ada peringkat