Anda mungkin juga menyukai
- RADAR 2aDokumen19 halamanRADAR 2aevhyajah0% (1)
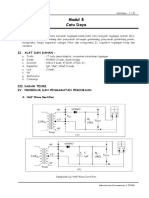
- Unit 2 Catu DayaDokumen7 halamanUnit 2 Catu Daya2IB02Achmad RiefqiBelum ada peringkat
- Modul 8 - Catu DayaDokumen8 halamanModul 8 - Catu Dayainggs econdaccBelum ada peringkat
- Tugas Radar Dan NavigasiDokumen28 halamanTugas Radar Dan NavigasiIsmu Nagh X-troneBelum ada peringkat
- Preview MixerrrrDokumen7 halamanPreview MixerrrrKURNIVAN NOER YUSVIANTOBelum ada peringkat
- Chapter 1 Respon FrekuensiDokumen23 halamanChapter 1 Respon FrekuensiRofiq NuryakinBelum ada peringkat
- Bagi Pertemuan 7 PDFDokumen20 halamanBagi Pertemuan 7 PDFCindy SilviaBelum ada peringkat
- Unit 2 Catu DayaDokumen7 halamanUnit 2 Catu DayaVit.Belum ada peringkat
- 02.pengkondisian Sinyal Dalam InstrumentasiDokumen32 halaman02.pengkondisian Sinyal Dalam Instrumentasifaiz fauzanBelum ada peringkat
- Laporan Lab Teknik Pengukuran Frekuensi TinggiDokumen20 halamanLaporan Lab Teknik Pengukuran Frekuensi TinggiIrham NurBelum ada peringkat
- Job3 - Filter BPF Dan BSF For DaringDokumen3 halamanJob3 - Filter BPF Dan BSF For DaringAristomi RanggaBelum ada peringkat
- Bab 1 PRTDokumen6 halamanBab 1 PRTZeihanBelum ada peringkat
- Pengkondisi Sinyal 1Dokumen33 halamanPengkondisi Sinyal 1Simanjuntak JulpianBelum ada peringkat
- Filter PenapisDokumen15 halamanFilter Penapisfarah_ana_2Belum ada peringkat
- Soal TCC Dvor Asii - 2Dokumen15 halamanSoal TCC Dvor Asii - 2Wildana HusnaBelum ada peringkat
- I1 Bode PlotDokumen4 halamanI1 Bode Plotdiva ayuBelum ada peringkat
- Instrumentasi Industri Jobsheet 7 Low Pass FilterDokumen9 halamanInstrumentasi Industri Jobsheet 7 Low Pass FilterChandra KusmayaBelum ada peringkat
- Unit 2 Catu DayaDokumen7 halamanUnit 2 Catu DayaHansAl-KhayyamiBelum ada peringkat
- Tugas 5 Radar NavigasiDokumen10 halamanTugas 5 Radar NavigasiArda NarendraBelum ada peringkat
- 03 TK2A Percobaan2 Penguat Dengan OpampDokumen19 halaman03 TK2A Percobaan2 Penguat Dengan OpampCrowBelum ada peringkat
- Aplikasi Phase Locked LoopDokumen5 halamanAplikasi Phase Locked LoopRahayu WindasariBelum ada peringkat
- Laprak HF Karakt DC Kel 1 Rev 01Dokumen13 halamanLaprak HF Karakt DC Kel 1 Rev 01aulia nisaBelum ada peringkat
- Makalah Kuliah: Osilator (9 Nopember 2002)Dokumen21 halamanMakalah Kuliah: Osilator (9 Nopember 2002)Romadhani Xtalplanet100% (1)
- 6 - Soni Lesmana - 190101024 - Te-2c - Tugas Konverter I To VDokumen9 halaman6 - Soni Lesmana - 190101024 - Te-2c - Tugas Konverter I To VSoni LesmanaBelum ada peringkat
- 11 - Filter Kapasitor-1Dokumen13 halaman11 - Filter Kapasitor-1Aris Styo AlfandiBelum ada peringkat
- LAB STL 02 Jobsheet 7 Low Pass FilterDokumen10 halamanLAB STL 02 Jobsheet 7 Low Pass FilterAntoni Yoga SetiawanBelum ada peringkat
- Tugas 13 - Heni Kartika (18033031)Dokumen7 halamanTugas 13 - Heni Kartika (18033031)Heni KartikaBelum ada peringkat
- DM DemodDokumen24 halamanDM DemodMiftakhul RohmahBelum ada peringkat
- Hanif Al Amri - Tugas Aplikasi LabolatoriumDokumen10 halamanHanif Al Amri - Tugas Aplikasi LabolatoriumHanif Al AmriBelum ada peringkat
- Laprak Elektronika Telekomunikasi 5 PengDokumen14 halamanLaprak Elektronika Telekomunikasi 5 Pengkurnia setiyawanBelum ada peringkat
- Laporan Wide Band AmplifierDokumen19 halamanLaporan Wide Band AmplifierMuhammad FarhanBelum ada peringkat
- Bab Ii PDFDokumen25 halamanBab Ii PDFKIRANA MAHARDHIKABelum ada peringkat
- ADC Dan DAC BaruDokumen62 halamanADC Dan DAC BaruAlfin FaizBelum ada peringkat
- 9 MixerDokumen19 halaman9 MixerVinsensius Sigit Widhi PrabowoBelum ada peringkat
- Unit 5 Pembangkit GelombangDokumen4 halamanUnit 5 Pembangkit GelombangJejak LangkahBelum ada peringkat
- Praktikum Tuned AmplifierDokumen13 halamanPraktikum Tuned AmplifierDaniel PutraBelum ada peringkat
- 1 - Rangkaian ResonatorDokumen43 halaman1 - Rangkaian Resonatormuhamadpanji alparizziBelum ada peringkat
- Materi 05 TRTDokumen9 halamanMateri 05 TRTSupriyadi donopawiroBelum ada peringkat
- Directional CouplerDokumen3 halamanDirectional CouplerMochammadPraditiaBelum ada peringkat
- Directional CouplerDokumen4 halamanDirectional CouplerNADYA SARAHBelum ada peringkat
- Bab-2 3 OPERASIONAL AMPLIFIER (OP-AMP) - FixDokumen42 halamanBab-2 3 OPERASIONAL AMPLIFIER (OP-AMP) - FixPhiaBelum ada peringkat
- Respon FrekuensiDokumen76 halamanRespon FrekuensiNurul KhotimhBelum ada peringkat
- 05 - Sistem Radar DopplerDokumen5 halaman05 - Sistem Radar DopplerAvo Wie LawaBelum ada peringkat
- Rangkaian Integrator RC AktifDokumen12 halamanRangkaian Integrator RC AktifGreenNadaBelum ada peringkat
- Laporan Integrator DeferensiatorDokumen25 halamanLaporan Integrator DeferensiatorRizki RahmawatiBelum ada peringkat
- Laporan 1Dokumen8 halamanLaporan 1Riie'Zzma GayatriBelum ada peringkat
- Penyearah Tak TerkendaliDokumen10 halamanPenyearah Tak TerkendaliMohamamd NanangBelum ada peringkat
- User Guide TemplateDokumen9 halamanUser Guide TemplatektcxpgtBelum ada peringkat
- Rangkaian Pembangkit Gelombang Dan PenerapannyaDokumen19 halamanRangkaian Pembangkit Gelombang Dan PenerapannyaSilviaBelum ada peringkat
- Laporan ECG Galuh Sandi MDokumen18 halamanLaporan ECG Galuh Sandi MGaluh SandiBelum ada peringkat
- Dioda Sebagai PenyearahDokumen16 halamanDioda Sebagai PenyearahRahmat Juniar DwiansyahBelum ada peringkat
- FSK DemodulationDokumen22 halamanFSK DemodulationNanda PutriBelum ada peringkat
- Laporan Praktikum 1Dokumen11 halamanLaporan Praktikum 1Meilani RahayuBelum ada peringkat
- Laporan Praktikum Elektronika Analog 2011 (Unsri)Dokumen61 halamanLaporan Praktikum Elektronika Analog 2011 (Unsri)Agustin Paryati100% (1)
- PLL MultiplierDokumen9 halamanPLL Multipliernurulagpira100% (1)
- Prosedur Percobaan SensorDokumen4 halamanProsedur Percobaan SensorevhyajahBelum ada peringkat
- Modul Pengantar Pemrograman Matlab PDFDokumen20 halamanModul Pengantar Pemrograman Matlab PDFShoffan ShoffaBelum ada peringkat
- Serial Port Computer & Pemrogramannya Dengan VB6.0Dokumen12 halamanSerial Port Computer & Pemrogramannya Dengan VB6.0evhyajahBelum ada peringkat
- Eksperimen Sinyal TVDokumen12 halamanEksperimen Sinyal TVkholis_smktelkomBelum ada peringkat
- Radar CuacaDokumen14 halamanRadar CuacaevhyajahBelum ada peringkat
- PALAPA-RING ... Towards Indonesia-ConnectedDokumen20 halamanPALAPA-RING ... Towards Indonesia-ConnectedevhyajahBelum ada peringkat
- Perc8-Aritmetika DasarDokumen8 halamanPerc8-Aritmetika DasarJusnadi HusainBelum ada peringkat
- Instrumentasi VirtualDokumen10 halamanInstrumentasi VirtualevhyajahBelum ada peringkat
- 38-Muara KakapDokumen116 halaman38-Muara Kakapmahbub_kokoBelum ada peringkat
- Gerbang Logika PDFDokumen13 halamanGerbang Logika PDFEddy Purwoko100% (3)
- Analisis Spektrum Frekuensi Isyarat EKG Menggunakan Jaringan Syaraf Tiruan Multi-Layer Perceptron Dan Algoritma Quick PropagationDokumen7 halamanAnalisis Spektrum Frekuensi Isyarat EKG Menggunakan Jaringan Syaraf Tiruan Multi-Layer Perceptron Dan Algoritma Quick PropagationevhyajahBelum ada peringkat
- Capture Vidio Menggunakan Ds PackDokumen5 halamanCapture Vidio Menggunakan Ds PackToyinx BeerBelum ada peringkat
- Transformator PengujianDokumen9 halamanTransformator PengujianevhyajahBelum ada peringkat
- Sejarah Perkembangan Tegangan TinggiDokumen11 halamanSejarah Perkembangan Tegangan TinggievhyajahBelum ada peringkat
- Operational Amplifier - Doc 1Dokumen10 halamanOperational Amplifier - Doc 1Bozan Hizbul Hidayat CemchijweBelum ada peringkat
- Analisis Fenomena Elektrohidrodinamik Pada Permukaan Minyak Silikon Menggunakan Plasma Lucutan Pijar Korona PositifDokumen13 halamanAnalisis Fenomena Elektrohidrodinamik Pada Permukaan Minyak Silikon Menggunakan Plasma Lucutan Pijar Korona PositifevhyajahBelum ada peringkat
- Rangkaian Logika DigitalDokumen112 halamanRangkaian Logika DigitalevhyajahBelum ada peringkat
- Gejala ResonansiDokumen4 halamanGejala ResonansievhyajahBelum ada peringkat
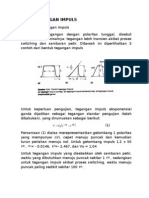
- Pembangkitan Tegangan ImpulsDokumen4 halamanPembangkitan Tegangan Impulsevhyajah100% (1)
- Pengukuran Tegangan Tinggi Ac, DC Dan ImpulsDokumen13 halamanPengukuran Tegangan Tinggi Ac, DC Dan Impulsevhyajah100% (1)
- Antenna Dan PropagasiDokumen15 halamanAntenna Dan PropagasievhyajahBelum ada peringkat
- Sistem BilanganDokumen215 halamanSistem BilanganevhyajahBelum ada peringkat
- Teknik Pemanfaatan Tenaga Listrik 2Dokumen169 halamanTeknik Pemanfaatan Tenaga Listrik 2a2sn_eliz100% (3)
- Defenisi Tegangan ImpulsDokumen4 halamanDefenisi Tegangan Impulsevhyajah100% (1)
- Modul Teknik Dasar Rectifier Dan InverterDokumen37 halamanModul Teknik Dasar Rectifier Dan InverterH3liax98% (49)
- Rangkaian PenyearahDokumen4 halamanRangkaian PenyearahevhyajahBelum ada peringkat
- Teknologi Integrated Circuit (IC)Dokumen10 halamanTeknologi Integrated Circuit (IC)evhyajahBelum ada peringkat
- Perancangan Rangkaian DigitalDokumen6 halamanPerancangan Rangkaian DigitalevhyajahBelum ada peringkat
- Pengantar Robotika PDFDokumen21 halamanPengantar Robotika PDFqolipBelum ada peringkat