Anda mungkin juga menyukai
- RoBo Aktuator Penggerak XIDokumen26 halamanRoBo Aktuator Penggerak XIMahardira DewantaraBelum ada peringkat
- AktuatorDokumen39 halamanAktuatorbasofi luqmanBelum ada peringkat
- Motor StepperDokumen9 halamanMotor SteppernovrizaaaBelum ada peringkat
- Materi Driver Motor StepperDokumen8 halamanMateri Driver Motor StepperAli Fajar NurohimBelum ada peringkat
- AKTUATORDokumen5 halamanAKTUATORThomas IndriantoBelum ada peringkat
- AktuatorDokumen5 halamanAktuatorpriyojokoBelum ada peringkat
- Aplikasi Motor Stepper Menggunakan At89s51 Dengan SDCCDokumen9 halamanAplikasi Motor Stepper Menggunakan At89s51 Dengan SDCCBocah IlangBelum ada peringkat
- D029-Aktuator ElektrikDokumen8 halamanD029-Aktuator ElektrikYusufBelum ada peringkat
- Budi Somantri - 12-2017-105 - Mekatronika Aa - Tugas 3 PDFDokumen11 halamanBudi Somantri - 12-2017-105 - Mekatronika Aa - Tugas 3 PDFArdanBelum ada peringkat
- Makalah StepperDokumen9 halamanMakalah StepperDedi Ridwan Fauzi100% (1)
- Aktuator 1Dokumen10 halamanAktuator 1Aldi AlfariziBelum ada peringkat
- Pengertian Motor StepperDokumen11 halamanPengertian Motor Stepperyodha_kusumaBelum ada peringkat
- Motor ListrikDokumen19 halamanMotor ListrikDonni AnggerBelum ada peringkat
- StepperDokumen12 halamanStepperFajar Haris Fauzi fajarharis.2019Belum ada peringkat
- Aktuator Berbasis ArduinoDokumen10 halamanAktuator Berbasis ArduinoEdwin Syihab HariantoBelum ada peringkat
- JenisDokumen2 halamanJenisLarry IchiroBelum ada peringkat
- Motor StepperDokumen7 halamanMotor StepperCarly DepsenBelum ada peringkat
- Dasar Konversi Energi ListrikDokumen7 halamanDasar Konversi Energi Listrikgdzxj74746Belum ada peringkat
- Driver Motor StepperDokumen18 halamanDriver Motor SteppernadiahBelum ada peringkat
- Pengetahuan Dasar Motor PenggerakDokumen23 halamanPengetahuan Dasar Motor PenggerakBe Herman100% (1)
- Pengendalian Motor DC Dengan Metode PWMDokumen15 halamanPengendalian Motor DC Dengan Metode PWMMeutia RahmahBelum ada peringkat
- OhmeterDokumen7 halamanOhmetersheiiBelum ada peringkat
- Aktuator FixDokumen6 halamanAktuator FixRadix AdityaBelum ada peringkat
- Motor Stepper.Dokumen8 halamanMotor Stepper.redspidey13Belum ada peringkat
- Training Litar Kawalan MotorDokumen19 halamanTraining Litar Kawalan MotorHairulnizam ZailaniBelum ada peringkat
- Tugas 1Dokumen17 halamanTugas 1Latif KurniaBelum ada peringkat
- Dasar Motor StepperDokumen7 halamanDasar Motor StepperHendi SantosoBelum ada peringkat
- #2Dokumen18 halaman#2Benedictus Edwin NugrahaBelum ada peringkat
- Teori Motor Stepper MekatronikaDokumen5 halamanTeori Motor Stepper MekatronikaHekal AmbiaBelum ada peringkat
- Motor StepperDokumen6 halamanMotor StepperRoniAmirChamdaniBelum ada peringkat
- AktuatorDokumen30 halamanAktuatorwili haryantoBelum ada peringkat
- Makalah Motor 1 Phasa ZefanyaDokumen10 halamanMakalah Motor 1 Phasa ZefanyaZefanya GurningBelum ada peringkat
- Landasan Teori: 1. AlternatorDokumen22 halamanLandasan Teori: 1. AlternatorFaizinBelum ada peringkat
- Motor Stepper Dan Motor ServoDokumen10 halamanMotor Stepper Dan Motor ServobungahsnBelum ada peringkat
- Motor StepperrrDokumen4 halamanMotor StepperrrVipBelum ada peringkat
- Bab IiiDokumen23 halamanBab Iiiardan yanuwarBelum ada peringkat
- Wahyu Setyawan 41416320037Dokumen5 halamanWahyu Setyawan 41416320037waixussBelum ada peringkat
- Makalah Motor StepperDokumen13 halamanMakalah Motor Steppermas madBelum ada peringkat
- Makalah Motor StepperDokumen13 halamanMakalah Motor StepperApang AriefBelum ada peringkat
- Kel 6 Rafi & ZhahraDokumen9 halamanKel 6 Rafi & ZhahraIlham ArtBelum ada peringkat
- Sistem Starting Motor Dengan Liquid RotorDokumen35 halamanSistem Starting Motor Dengan Liquid RotorFahmiMuhammadRifai100% (9)
- Makalah Motor StepperDokumen5 halamanMakalah Motor StepperWinji Dwi MBelum ada peringkat
- Motor Stepper & Motor Servo YuscaDokumen18 halamanMotor Stepper & Motor Servo YuscaAHMAD JUKLIV PANDUBelum ada peringkat
- Tugas Widya Apri WandiniDokumen15 halamanTugas Widya Apri WandiniPendi AriantoBelum ada peringkat
- Alternator DN RegulatorDokumen40 halamanAlternator DN Regulatorteknik tkrBelum ada peringkat
- Laporan Projek Praktikum Motor StepperDokumen11 halamanLaporan Projek Praktikum Motor StepperRecta Tidar100% (1)
- Kelompok 3 - Motor SteperDokumen12 halamanKelompok 3 - Motor SteperArya RochmanBelum ada peringkat
- Starting Motor Induksi 3 FasaDokumen7 halamanStarting Motor Induksi 3 FasaMaya Mawarni BiranaBelum ada peringkat
- Motor Stepper Penjelasan PresentasiDokumen20 halamanMotor Stepper Penjelasan PresentasiAchmad RivaldiBelum ada peringkat
- Operasi PembangkitDokumen8 halamanOperasi PembangkitAndrean SuryaBelum ada peringkat
- Charging SystemDokumen43 halamanCharging SystemMr GtBelum ada peringkat
- Motor StepperDokumen7 halamanMotor StepperRoniAmirChamdani100% (1)
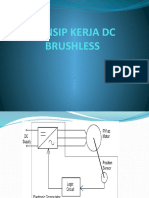
- Prinsip Kerja DC BrushlessDokumen23 halamanPrinsip Kerja DC BrushlessGhozi PratamBelum ada peringkat
- Arya Winara Tugas1 Teori SisdalDokumen9 halamanArya Winara Tugas1 Teori SisdalArya Winara SaputraBelum ada peringkat
- Makalah Praktikum Motor DC Daya KecilDokumen14 halamanMakalah Praktikum Motor DC Daya KecilAldy PradanaBelum ada peringkat
- 5-Pertemuan 05 - Aktuator Mekanik Dan Listrik PDFDokumen4 halaman5-Pertemuan 05 - Aktuator Mekanik Dan Listrik PDFAnes Mourinho SiregarBelum ada peringkat
- Pekerjaan Hote L Banana inDokumen1 halamanPekerjaan Hote L Banana inFerry Mangihut SiahaanBelum ada peringkat
- BASTPDokumen1 halamanBASTPFerry Mangihut SiahaanBelum ada peringkat
- Yahoo Mail - (LPSE) (KUALIFIKASI) Undangan Pembuktian KualifikasiDokumen2 halamanYahoo Mail - (LPSE) (KUALIFIKASI) Undangan Pembuktian KualifikasiFerry Mangihut SiahaanBelum ada peringkat
- Tendik ITB Dilatih Penggunaan Sistem Oracle Fusion Untuk Pengelolaan KeuanganDokumen3 halamanTendik ITB Dilatih Penggunaan Sistem Oracle Fusion Untuk Pengelolaan KeuanganFerry Mangihut SiahaanBelum ada peringkat
- GBR Listrik KodiklatDokumen1 halamanGBR Listrik KodiklatFerry Mangihut SiahaanBelum ada peringkat
- 2521 Asep Saepudin PT KIMIA FARMA PLANT BANJARAN 10022023 082142 Signed PDFDokumen1 halaman2521 Asep Saepudin PT KIMIA FARMA PLANT BANJARAN 10022023 082142 Signed PDFFerry Mangihut SiahaanBelum ada peringkat
- ADokumen1 halamanAFerry Mangihut SiahaanBelum ada peringkat
- 2415 M Arieffin PT BANGUN PUJI LUMBUNG ABADI 10022023 082635 Signed PDFDokumen1 halaman2415 M Arieffin PT BANGUN PUJI LUMBUNG ABADI 10022023 082635 Signed PDFFerry Mangihut SiahaanBelum ada peringkat
- Daftar Mata Pembayaran Pekerjaan Utama LPTQDokumen1 halamanDaftar Mata Pembayaran Pekerjaan Utama LPTQFerry Mangihut SiahaanBelum ada peringkat
- Hps Gardu 2021 UlpDokumen3 halamanHps Gardu 2021 UlpFerry Mangihut SiahaanBelum ada peringkat
- LPSE Provinsi Jawa Barat - Informasi TenderDokumen1 halamanLPSE Provinsi Jawa Barat - Informasi TenderFerry Mangihut SiahaanBelum ada peringkat
- Ebook Form Checklist Audit Smk3Dokumen61 halamanEbook Form Checklist Audit Smk3Satri Dhito100% (2)
- Boq Rumah Genset Bandara Ok.Dokumen4 halamanBoq Rumah Genset Bandara Ok.Ferry Mangihut SiahaanBelum ada peringkat
- 03 SRT Kesediaan Pengurangan Volum 2020Dokumen1 halaman03 SRT Kesediaan Pengurangan Volum 2020Ferry Mangihut SiahaanBelum ada peringkat
- V.17 - MDP Tender PK PascakualifikasiDokumen191 halamanV.17 - MDP Tender PK Pascakualifikasididin kopiBelum ada peringkat
- Kop Kontrak Lsds Srg20Dokumen1 halamanKop Kontrak Lsds Srg20Ferry Mangihut SiahaanBelum ada peringkat
- 16075547-Scan Ba PenjelasanDokumen3 halaman16075547-Scan Ba PenjelasanFerry Mangihut SiahaanBelum ada peringkat
- Berita Acara Hasil Pelelangan-34699014Dokumen3 halamanBerita Acara Hasil Pelelangan-34699014Ferry Mangihut SiahaanBelum ada peringkat
- 27055300-1. Pengumuman Lelang 0017Dokumen1 halaman27055300-1. Pengumuman Lelang 0017Ferry Mangihut SiahaanBelum ada peringkat
- 1C - Training Auditor SMK3Dokumen11 halaman1C - Training Auditor SMK3Ferry Mangihut SiahaanBelum ada peringkat
- Surat K3Dokumen1 halamanSurat K3Ferry Mangihut SiahaanBelum ada peringkat
- Surat Teguran Iujptl Cabdin BandungDokumen8 halamanSurat Teguran Iujptl Cabdin BandungFerry Mangihut SiahaanBelum ada peringkat
- V.17 - MDP Tender PK PascakualifikasiDokumen191 halamanV.17 - MDP Tender PK Pascakualifikasididin kopiBelum ada peringkat
- KAK Genset Dan UPSDokumen7 halamanKAK Genset Dan UPSFerry Mangihut SiahaanBelum ada peringkat
- Mikrokontroler At89c51Dokumen7 halamanMikrokontroler At89c51Ferry Mangihut SiahaanBelum ada peringkat
- 015 Surat PC APEI Surat Pelaksanaan Ujian SERKOM Pembangkit Tenaga Listrik April 2021Dokumen6 halaman015 Surat PC APEI Surat Pelaksanaan Ujian SERKOM Pembangkit Tenaga Listrik April 2021Ferry Mangihut SiahaanBelum ada peringkat
- 28053000-Pengumuman FinalDokumen2 halaman28053000-Pengumuman FinalFerry Mangihut SiahaanBelum ada peringkat
- A D D e N D U M Pju Tamansari - GaneshaDokumen3 halamanA D D e N D U M Pju Tamansari - GaneshaFerry Mangihut SiahaanBelum ada peringkat
- Booklet Sepeda Untuk Kesehatan JantungDokumen12 halamanBooklet Sepeda Untuk Kesehatan JantungGilang Fajar RamadhanBelum ada peringkat