Anda mungkin juga menyukai
- Proximity SensorDokumen8 halamanProximity SensorAhmad Labib FardanyBelum ada peringkat
- M Akbar Anfasa - 035 - Remote Sensing RB - Tugas 3Dokumen13 halamanM Akbar Anfasa - 035 - Remote Sensing RB - Tugas 3Clay ThompsonBelum ada peringkat
- Metode Analisa Material.Dokumen13 halamanMetode Analisa Material.Ulfah Naida MarbunBelum ada peringkat
- Tugas Geo 3 - MighaeDokumen5 halamanTugas Geo 3 - MighaeMighael Imanuel EprilinsonBelum ada peringkat
- Bab IiDokumen25 halamanBab IiNasry Putra Bungsu MoBelum ada peringkat
- ACARA II - Pengenalan Jenis-Jenis CitraDokumen72 halamanACARA II - Pengenalan Jenis-Jenis CitraYUHUBelum ada peringkat
- Revisi - C - Kelompok 8 - Uji Karakteristik Sensor Ultrasonik Dan Infrared ModulDokumen7 halamanRevisi - C - Kelompok 8 - Uji Karakteristik Sensor Ultrasonik Dan Infrared ModulIian Nugraha SeptiyanBelum ada peringkat
- 2-Konsep Dasar "Remote Sensing"Dokumen33 halaman2-Konsep Dasar "Remote Sensing"Alkurniawan SaputraBelum ada peringkat
- Kuliah Inderaja PDFDokumen52 halamanKuliah Inderaja PDFAndiraBelum ada peringkat
- Penginderaan JauhDokumen12 halamanPenginderaan JauhAndi Zarkia NurBelum ada peringkat
- REMOTE SENSING EvisiDokumen88 halamanREMOTE SENSING EvisiDimas SusiloBelum ada peringkat
- Remote SensingDokumen7 halamanRemote SensingRizal ArdiantoBelum ada peringkat
- Dasar-Dasar Penginderaan JauhDokumen27 halamanDasar-Dasar Penginderaan JauhNoviana TariganBelum ada peringkat
- Pengenalan Jenis-Jenis CitraDokumen12 halamanPengenalan Jenis-Jenis CitraImabezces DYBelum ada peringkat
- Penginderaan JauhDokumen9 halamanPenginderaan JauhnyuherdiyantoadiBelum ada peringkat
- Laporan Akuisisi Data Dan Pengolahan SinyalDokumen24 halamanLaporan Akuisisi Data Dan Pengolahan SinyalGilbertPrabowoBelum ada peringkat
- Tugas PJ ResolusiDokumen5 halamanTugas PJ ResolusiPlenist Plekenyut-kenyutBelum ada peringkat
- Tugas Grafika KomputerDokumen13 halamanTugas Grafika KomputerAldhy KurniawanBelum ada peringkat
- Penginderaan JauhDokumen31 halamanPenginderaan JauhRafii FauzanBelum ada peringkat
- Analisis Difenhidramin HCL Menggunakan Metode Spektroskopi Inframerah Dan Spektrofotometri Uv PDF FreeDokumen20 halamanAnalisis Difenhidramin HCL Menggunakan Metode Spektroskopi Inframerah Dan Spektrofotometri Uv PDF Freesurya rahadiBelum ada peringkat
- Tugas 1 - Mekatronika - AaDokumen4 halamanTugas 1 - Mekatronika - AaAhmad Zein SyahnaBelum ada peringkat
- Tugas InstrumentasiDokumen17 halamanTugas InstrumentasiNuratikah WidyastutiBelum ada peringkat
- Spektrofotometri Infra MerahDokumen19 halamanSpektrofotometri Infra MerahBudinta LubizzBelum ada peringkat
- Hartoni Gumay: Penginderaan Jauh Gelombang Mikro Dan RadarDokumen11 halamanHartoni Gumay: Penginderaan Jauh Gelombang Mikro Dan RadarLiaBelum ada peringkat
- Peninderaan JauhDokumen63 halamanPeninderaan Jauhbernadeth marlessyBelum ada peringkat
- Cara Pengunaan Alat StreoskopDokumen21 halamanCara Pengunaan Alat StreoskopyudhaBelum ada peringkat
- Materi Sementara Parameter CT ScanDokumen12 halamanMateri Sementara Parameter CT ScanPramu AmanahBelum ada peringkat
- Tugas Prof AmDokumen28 halamanTugas Prof AmMariameisrirahayuBelum ada peringkat
- Alat Radiasi Elektromagnetik - Kelompok 3Dokumen17 halamanAlat Radiasi Elektromagnetik - Kelompok 3Kiki Riska DewiBelum ada peringkat
- CT ScanDokumen12 halamanCT ScanTri SeptianBelum ada peringkat
- Spektroskopi Infra Merah Dan Resonansi Magnetik IntiDokumen17 halamanSpektroskopi Infra Merah Dan Resonansi Magnetik IntigitaBelum ada peringkat
- Asas Penginderaan Jauh Non Fotografik Sistem Gelombang Mikro Dan Sistem RadarDokumen8 halamanAsas Penginderaan Jauh Non Fotografik Sistem Gelombang Mikro Dan Sistem RadarAlifia Syarna Salika100% (1)
- m53 Penginderaan JauhDokumen18 halamanm53 Penginderaan Jauhraisyamuhammad148Belum ada peringkat
- 5 Penginderaan JauhDokumen60 halaman5 Penginderaan JauhKhairul AzizBelum ada peringkat
- NAMA - SRI ZAHA-WPS OfficeDokumen17 halamanNAMA - SRI ZAHA-WPS OfficeSrii ZaharaBelum ada peringkat
- Resume Analisis Kualitatif Dan Kuantitatif Spektrofotometri Ir (Infra Red)Dokumen12 halamanResume Analisis Kualitatif Dan Kuantitatif Spektrofotometri Ir (Infra Red)Muhammad FaisalBelum ada peringkat
- Terjemahan Materi Remote SensingDokumen34 halamanTerjemahan Materi Remote Sensingmentari utami putriBelum ada peringkat
- Resolusi SpasialDokumen8 halamanResolusi SpasialRirin oktaviaBelum ada peringkat
- Jurnal Einstein: Implementasi Sensor Ultrasonik Hc-Sr04 Sebagai Sensor Parkir Mobil Berbasis ArduinoDokumen8 halamanJurnal Einstein: Implementasi Sensor Ultrasonik Hc-Sr04 Sebagai Sensor Parkir Mobil Berbasis ArduinodzikavicBelum ada peringkat
- Komponen CahayaDokumen22 halamanKomponen CahayaAdi PrabowoBelum ada peringkat
- Ananing Setyo - 26020215130077Dokumen7 halamanAnaning Setyo - 26020215130077Awang BagasBelum ada peringkat
- Penginderaan JauhDokumen66 halamanPenginderaan Jauhnabilazahra982Belum ada peringkat
- Penginderaan JauhDokumen69 halamanPenginderaan JauhYullia PuTriBelum ada peringkat
- Fourier-Transform Infrared (Ftir), Uv-VisDokumen28 halamanFourier-Transform Infrared (Ftir), Uv-VisYoza FitriadiBelum ada peringkat
- Ultrasound Imaging Tambahan MateriDokumen29 halamanUltrasound Imaging Tambahan MateriImam AlfiantoBelum ada peringkat
- Contoh Azas Fotometri Dalam Kehidupan Sehari-HariDokumen4 halamanContoh Azas Fotometri Dalam Kehidupan Sehari-HariFerry WijayaBelum ada peringkat
- SensorDokumen4 halamanSensorYessy Dwita RachmaBelum ada peringkat
- Bagaimana Citra ENVI 1Dokumen56 halamanBagaimana Citra ENVI 1Ananda S Micola100% (1)
- Robotika Petemuan 2 Dan 3Dokumen40 halamanRobotika Petemuan 2 Dan 3ats harmatsistaBelum ada peringkat
- Materi - Ke 10 - PJ Citra Untuk Media PembljrnDokumen16 halamanMateri - Ke 10 - PJ Citra Untuk Media Pembljrnbaldatun toyyibatunBelum ada peringkat
- Penetapan Kadar Defindrihidramin HCLDokumen19 halamanPenetapan Kadar Defindrihidramin HCLAriefRajibBelum ada peringkat
- Laporan Praktikum Inderaja Modul 4 - Pan SharpeningDokumen27 halamanLaporan Praktikum Inderaja Modul 4 - Pan SharpeningDody VirgiawanBelum ada peringkat
- RBL Gelombang-Kelompok 2: Pemanfaatan Gelombang Ultrasonik Sebagai Alat Pendeteksi Benda SekitarDokumen8 halamanRBL Gelombang-Kelompok 2: Pemanfaatan Gelombang Ultrasonik Sebagai Alat Pendeteksi Benda SekitarDavid EriksonBelum ada peringkat
- Artikel FTIRDokumen16 halamanArtikel FTIRFauzi Cynk VinnaBelum ada peringkat
- SpektrometerDokumen8 halamanSpektrometerNerangel LvBelum ada peringkat
- Interaksi Energi Matahari Dalam Sistem Bumi Dan AtmosfirDokumen11 halamanInteraksi Energi Matahari Dalam Sistem Bumi Dan AtmosfirMuhammad Arief WibowoBelum ada peringkat
- P Memberdayakan Gerakan LiterasiDokumen38 halamanP Memberdayakan Gerakan LiterasiMuhammad Arief WibowoBelum ada peringkat
- F PAPER KOlokium 2015 SimantuDokumen9 halamanF PAPER KOlokium 2015 SimantuMuhammad Arief WibowoBelum ada peringkat
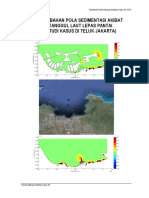
- ID Pemetaan Sebaran Sedimen Dasar BerdasarkDokumen11 halamanID Pemetaan Sebaran Sedimen Dasar BerdasarkMuhammad Arief WibowoBelum ada peringkat