Anda mungkin juga menyukai
- Mukhammad Fajrin Falakhi - Quiz 1Dokumen3 halamanMukhammad Fajrin Falakhi - Quiz 1IbrohimBelum ada peringkat
- Elektronika DayaDokumen16 halamanElektronika DayaHanifa ZicoBelum ada peringkat
- Kinetika Reaksi Kimia Dalam Pengolahan PanganDokumen31 halamanKinetika Reaksi Kimia Dalam Pengolahan Panganrebolegi100% (1)
- Bab 3Dokumen41 halamanBab 3Rizka Rinda PramastiBelum ada peringkat
- TUGAS GJR Hitung Alinemen Horizontal FIXDokumen61 halamanTUGAS GJR Hitung Alinemen Horizontal FIXVieny AsaBelum ada peringkat
- Kinetika Kimia Knetika ReaksiDokumen34 halamanKinetika Kimia Knetika ReaksiAhmad HafizBelum ada peringkat
- Makalah RL ACDokumen13 halamanMakalah RL ACHenri Hasudungan SinagaBelum ada peringkat
- PERHITUNGANDokumen5 halamanPERHITUNGANRoy Sam RetraubunBelum ada peringkat
- Pertemuan 8Dokumen9 halamanPertemuan 8Olga OktavianiBelum ada peringkat
- Tugas III - SPL - KelompokDokumen19 halamanTugas III - SPL - KelompokRiska Mu'amarizaBelum ada peringkat
- Metode Waktu ParuhDokumen30 halamanMetode Waktu ParuhElenna WardaniBelum ada peringkat
- Perbaikan Faktor Daya 1Dokumen8 halamanPerbaikan Faktor Daya 1iinBelum ada peringkat
- Kimia Fisik Bab 2Dokumen12 halamanKimia Fisik Bab 2Bibiana Rume maranBelum ada peringkat
- Praktikum Rangkaian Listrik I-DikonversiDokumen11 halamanPraktikum Rangkaian Listrik I-DikonversiDelsy Delfia SalamorBelum ada peringkat
- Soal AplikasiDokumen8 halamanSoal Aplikasisamuel laurentiusBelum ada peringkat
- Tuning and Plant Wide ControlDokumen5 halamanTuning and Plant Wide ControlAmal RizkyBelum ada peringkat
- P12 - 13 Evaluasi Sistem Pentanahan Gardu Induk Maros 150 KVDokumen15 halamanP12 - 13 Evaluasi Sistem Pentanahan Gardu Induk Maros 150 KVannisaanugerahBelum ada peringkat
- Jurnal Akuisisi Data Sandy Permana 1972-Halaman-DihapusDokumen42 halamanJurnal Akuisisi Data Sandy Permana 1972-Halaman-Dihapus20028 Sima Hariara NainggolanBelum ada peringkat
- Tugas Besar Pengendalian Sistem.Dokumen12 halamanTugas Besar Pengendalian Sistem.rilvanadinugrahaBelum ada peringkat
- Jawaban Quiz TTTDokumen4 halamanJawaban Quiz TTTilmiBelum ada peringkat
- Tugas 2 Kimia Fisika Kelompok 2Dokumen6 halamanTugas 2 Kimia Fisika Kelompok 2Anita Budi KrisnawatiBelum ada peringkat
- Kinetika MetalurgiDokumen13 halamanKinetika Metalurgiakbarul muttaqinBelum ada peringkat
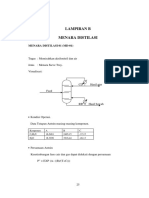
- LAMPIRAN B (Menara Distilasi)Dokumen13 halamanLAMPIRAN B (Menara Distilasi)Dewi SantikaBelum ada peringkat
- Voltameter TembagaDokumen11 halamanVoltameter TembagaFahmi MuslimBelum ada peringkat
- Kinetika Reaksi Kimia Dalam Pengolahan PanganDokumen31 halamanKinetika Reaksi Kimia Dalam Pengolahan PanganNadia PraditasariBelum ada peringkat
- Prob 8 Dan Prob 9Dokumen9 halamanProb 8 Dan Prob 9Daning Kinanti SutamaBelum ada peringkat
- Modul Aksial Tekan Dan LenturDokumen17 halamanModul Aksial Tekan Dan LenturHeru SetiawanBelum ada peringkat
- UAS - Transformator - 117 - 1501621008 - MUHAMMAD ALI FAJRIDokumen6 halamanUAS - Transformator - 117 - 1501621008 - MUHAMMAD ALI FAJRIMuhammad Alifajri18Belum ada peringkat
- Tugas AdsorpsiDokumen4 halamanTugas AdsorpsilutfiahBelum ada peringkat
- Laporan Tugas Final - Ade Rizal Novianto - 3td4teDokumen6 halamanLaporan Tugas Final - Ade Rizal Novianto - 3td4teAde RougenBelum ada peringkat
- 2020 10 26 09 43 23 D091191052 Perpan9 FACHRIAL NOVRI TRIYANDI D091191052Dokumen13 halaman2020 10 26 09 43 23 D091191052 Perpan9 FACHRIAL NOVRI TRIYANDI D091191052Fachrial Novri TriyandiBelum ada peringkat
- Elctr - 7. Transfer Daya MaksimumDokumen21 halamanElctr - 7. Transfer Daya MaksimumRizki AkbarBelum ada peringkat
- Kondktometri 1 NitaDokumen9 halamanKondktometri 1 NitaSyahrawi MuhammadBelum ada peringkat
- Uts Kelistrikan Lefrandi SimanjuntakDokumen5 halamanUts Kelistrikan Lefrandi SimanjuntakOndi SiagianBelum ada peringkat
- BAB XI - Studi Kasus - Relay ProteksiDokumen10 halamanBAB XI - Studi Kasus - Relay ProteksiAnas RifaiBelum ada peringkat
- Laporan Lengkap Perc 1Dokumen16 halamanLaporan Lengkap Perc 1lisda watiBelum ada peringkat
- Laporan Praktikum Elektronika - Boost - Hilman Naufal Rafi - 184308045 - TKA3BDokumen8 halamanLaporan Praktikum Elektronika - Boost - Hilman Naufal Rafi - 184308045 - TKA3BHilman NaufalBelum ada peringkat
- Soal ElektrogravimetriDokumen3 halamanSoal ElektrogravimetriYulida erdani100% (1)
- Contoh Soal Kinetika KimiaDokumen10 halamanContoh Soal Kinetika KimiaAnonymous lkeo2i9FoBelum ada peringkat
- Soal Fisika Statistika 30-40Dokumen8 halamanSoal Fisika Statistika 30-40dyah_inggitBelum ada peringkat
- Tugas Fisdas 7Dokumen5 halamanTugas Fisdas 7Akmal100% (1)
- Kunci Jawaban Soal Teori Fisika Osn 2006Dokumen5 halamanKunci Jawaban Soal Teori Fisika Osn 2006Enin Ira SupriantoBelum ada peringkat
- Tugas Kelompok KimfisDokumen17 halamanTugas Kelompok KimfisMuhammad KaesaBelum ada peringkat
- TRAFO 115 - 1501620012 - Mahran MawaridDokumen5 halamanTRAFO 115 - 1501620012 - Mahran MawaridmahranmawaridBelum ada peringkat
- Tugas 3 - ASTL Lanjut - Anindira Listy Hartisa - 21060122420025Dokumen15 halamanTugas 3 - ASTL Lanjut - Anindira Listy Hartisa - 21060122420025Anindira Listy HartisaBelum ada peringkat
- Kelompok 2 - Tugas TRK I Latihan Soal (Revisi)Dokumen7 halamanKelompok 2 - Tugas TRK I Latihan Soal (Revisi)TegarRochmad OddyPramantoBelum ada peringkat
- Bentley 4e Solman-Principles of Measurement SystemDokumen35 halamanBentley 4e Solman-Principles of Measurement SystemFadhil Akmal Fakhri100% (1)
- Kinetika Reaksi CLOCK THE OLD NASSAUDokumen13 halamanKinetika Reaksi CLOCK THE OLD NASSAUCantika AldaBelum ada peringkat
- Contoh Soal Rangkaian TransientDokumen14 halamanContoh Soal Rangkaian TransientDINA ALFARIZA NST0% (3)
- Tugas Bab 2 Perpin Kita CompressDokumen12 halamanTugas Bab 2 Perpin Kita CompressChandra JulianBelum ada peringkat
- 04 Reaksi Eksotermis Dan Bertekanan TinggiDokumen20 halaman04 Reaksi Eksotermis Dan Bertekanan TinggiNadia Gusti Ami PutriBelum ada peringkat
- Hukum TermodinamikaDokumen2 halamanHukum TermodinamikaRhieva Wong CilikBelum ada peringkat
- P. Anzar M.praktikum K.diskritDokumen10 halamanP. Anzar M.praktikum K.diskritrinthamelisaguloBelum ada peringkat
- Tugas Ke-3 KINKAT Kelompok 2Dokumen5 halamanTugas Ke-3 KINKAT Kelompok 2Novelia Ananda FitrilaBelum ada peringkat
- Untai ListrikDokumen12 halamanUntai ListrikWanterPiusLimbongBelum ada peringkat
- Laju Suatu Reaksi Pada TDokumen3 halamanLaju Suatu Reaksi Pada TTri YaniBelum ada peringkat
- Dy Bank Soal Dan 1Dokumen29 halamanDy Bank Soal Dan 1Muhammad NazirullahBelum ada peringkat
- Laporan Praktikum Fpercobaan KalorimeterDokumen13 halamanLaporan Praktikum Fpercobaan KalorimeterNabila PangestiBelum ada peringkat
- LOGBOOK MINGGU KE-13 - Anamta Arrum Sulistyo AjiDokumen2 halamanLOGBOOK MINGGU KE-13 - Anamta Arrum Sulistyo Aji502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- LOGBOOK MINGGU KE-3 - Anamta Arrum Sulistyo AjiDokumen2 halamanLOGBOOK MINGGU KE-3 - Anamta Arrum Sulistyo Aji502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- LOGBOOK MINGGU KE-5 - Anamta Arrum Sulistyo AjiDokumen2 halamanLOGBOOK MINGGU KE-5 - Anamta Arrum Sulistyo Aji502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Laporang Magang Fix-1-MergedDokumen29 halamanLaporang Magang Fix-1-Merged502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- LOGBOOK MINGGU KE-2 - Anamta Arrum Sulistyo AjiDokumen2 halamanLOGBOOK MINGGU KE-2 - Anamta Arrum Sulistyo Aji502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Bab IiiDokumen14 halamanBab Iii502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Dasar Teori - P3Dokumen2 halamanDasar Teori - P3502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- UC Considering Spinning ReserveDokumen10 halamanUC Considering Spinning Reserve502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Selamat SoreDokumen5 halamanSelamat Sore502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas Modul - P5Dokumen4 halamanTugas Modul - P5502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- P5 - A2 - Anamta Arrum Sulistyo Aji-8-16Dokumen9 halamanP5 - A2 - Anamta Arrum Sulistyo Aji-8-16502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- LAMPIRAN1Dokumen10 halamanLAMPIRAN1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas Quis (Resume) - Anamta Arrum Sulistyo Aji - 5022201134Dokumen1 halamanTugas Quis (Resume) - Anamta Arrum Sulistyo Aji - 5022201134502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Dasar Teori - P5Dokumen2 halamanDasar Teori - P5502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas Modul - P4Dokumen4 halamanTugas Modul - P4502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas Modul - P1Dokumen4 halamanTugas Modul - P1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas 1Dokumen1 halamanTugas 1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- NilaiDokumen2 halamanNilai502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas Modul - P2Dokumen4 halamanTugas Modul - P2502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Dasar TeoriDokumen3 halamanDasar Teori502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Dasar Teori - P1Dokumen2 halamanDasar Teori - P1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Kelompok 9 - Artikel IlmiahDokumen28 halamanKelompok 9 - Artikel Ilmiah502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- ListDokumen2 halamanList502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas 1Dokumen1 halamanTugas 1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas 1Dokumen3 halamanTugas 1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Tugas Overcurret Coordination - 2Dokumen2 halamanTugas Overcurret Coordination - 2502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Template PenulisanDokumen1 halamanTemplate Penulisan502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Template PenulisanDokumen1 halamanTemplate Penulisan502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Forwar D BiasDokumen11 halamanForwar D Bias502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Template PenulisanDokumen3 halamanTemplate Penulisan502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat