Anda mungkin juga menyukai
- Tugas Perencanaan Proyek Industri Tinggal PrintDokumen21 halamanTugas Perencanaan Proyek Industri Tinggal PrintFreddy Marthin Poetra SimangunsongBelum ada peringkat
- Jurnal Saklar Otomatis 2019 PDFDokumen7 halamanJurnal Saklar Otomatis 2019 PDFApril FirmanBelum ada peringkat
- TP - Mass Energy BalanceDokumen40 halamanTP - Mass Energy BalanceBhaktiHDwiCBelum ada peringkat
- Makalah Ekologi IndustriDokumen10 halamanMakalah Ekologi Industrinur muhammad safiiBelum ada peringkat
- P5 K3 Workplace Safety Health ProgramDokumen36 halamanP5 K3 Workplace Safety Health ProgramDhe La VegaBelum ada peringkat
- Jurnal Oven PengeringDokumen17 halamanJurnal Oven PengeringAldi AhsanBelum ada peringkat
- Proposal Tugas AkhirDokumen9 halamanProposal Tugas AkhirRifqi Fadli Azhar HasibuanBelum ada peringkat
- Tugas Ekonomi Teknik KimiaDokumen10 halamanTugas Ekonomi Teknik KimiaMuhammad Barin ElyasaBelum ada peringkat
- Kitosan Sebagai Edible Coating Pada Ikan Lele Dumbo (Clarias Gariepinus) Asap Yang Dikemas Vakum Selama Penyimpanan Suhu Ruang - 3 PDFDokumen95 halamanKitosan Sebagai Edible Coating Pada Ikan Lele Dumbo (Clarias Gariepinus) Asap Yang Dikemas Vakum Selama Penyimpanan Suhu Ruang - 3 PDFDanielBelum ada peringkat
- ANALISIS DAMPAK LINGKUNGAN 05121002047 Afriyani Zulyanti (AMDAL)Dokumen15 halamanANALISIS DAMPAK LINGKUNGAN 05121002047 Afriyani Zulyanti (AMDAL)afriyanizulyantiBelum ada peringkat
- Permasalahan Lingkungan Yang Sering Terjadi Di WonosoboDokumen3 halamanPermasalahan Lingkungan Yang Sering Terjadi Di WonosoboImam MahriyansahBelum ada peringkat
- HumidifikasiDokumen26 halamanHumidifikasiAkhmad KautsarBelum ada peringkat
- TEKPANG Vacuum Mangga (Bab 4) KelompokDokumen7 halamanTEKPANG Vacuum Mangga (Bab 4) Kelompoknadia susiyanaBelum ada peringkat
- PKM Kerlicok (Keripik Gembili Coklat)Dokumen20 halamanPKM Kerlicok (Keripik Gembili Coklat)Ana Cahya99Belum ada peringkat
- Tugas Week 3 - Daftar Eksplorasi Dan Analisis Tren Teknologi - May Lisa Trifiana - STIE PENADokumen5 halamanTugas Week 3 - Daftar Eksplorasi Dan Analisis Tren Teknologi - May Lisa Trifiana - STIE PENAMAY TRIFIANABelum ada peringkat
- Laporan Teknik Pengolahan JamDokumen7 halamanLaporan Teknik Pengolahan JamricoBelum ada peringkat
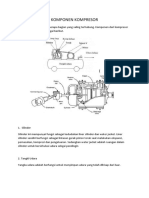
- Komponen KompresorDokumen4 halamanKomponen KompresorHafizhBelum ada peringkat
- PROPOSAL MAGANG INDUSTRI FORMAL PT PLN (Persero) UP3 SukoharjoDokumen38 halamanPROPOSAL MAGANG INDUSTRI FORMAL PT PLN (Persero) UP3 SukoharjoDeva RamadhanBelum ada peringkat
- LPJ Oprec 2023Dokumen12 halamanLPJ Oprec 2023Riska RasyidaBelum ada peringkat
- Bab 1Dokumen5 halamanBab 1Rizki Zella Novita SariBelum ada peringkat
- BAB I PT PksDokumen27 halamanBAB I PT PksPutri WildaniBelum ada peringkat
- Bab 3Dokumen58 halamanBab 3Park Ie-inBelum ada peringkat
- Tugas InstrumentasiDokumen9 halamanTugas InstrumentasiRizky AnjanaBelum ada peringkat
- Laporan Kerja Praktek Statistika 2017Dokumen61 halamanLaporan Kerja Praktek Statistika 2017Purnama PutraBelum ada peringkat
- Evaluasi Kelayakan Investasi Usaha "Minuman Segar Jus Buah Dan Pop Ice"Dokumen11 halamanEvaluasi Kelayakan Investasi Usaha "Minuman Segar Jus Buah Dan Pop Ice"Maria Sandikania MulyaBelum ada peringkat
- Proposal PMM Umm Desa BanjararumDokumen4 halamanProposal PMM Umm Desa BanjararumAdisty DevindaBelum ada peringkat
- Laporan PKL Fajar Kurniawan P (Revisi HN)Dokumen36 halamanLaporan PKL Fajar Kurniawan P (Revisi HN)LegendOf KurniaBelum ada peringkat
- Program Kreativitas MahasiswaDokumen27 halamanProgram Kreativitas MahasiswaSyauqi AsyhabiraBelum ada peringkat
- Kerja Praktek Asli Bab 1Dokumen31 halamanKerja Praktek Asli Bab 1Feri WahyudiBelum ada peringkat
- Proposal PKL - Riwina Bibina BR SinulinggaDokumen8 halamanProposal PKL - Riwina Bibina BR SinulinggaKKN Pancur Batu KaroBelum ada peringkat
- Materi Vertical DryerDokumen3 halamanMateri Vertical DryerAnggraini PutriBelum ada peringkat
- Makalah Statistik MutuDokumen3 halamanMakalah Statistik MutuSri BeasulaniBelum ada peringkat
- Flow Chart Cara Kerja Alat Mesin Pompa Air OtomatisDokumen2 halamanFlow Chart Cara Kerja Alat Mesin Pompa Air OtomatisAhmadSyarapa0% (1)
- Best Meat Aspek PemasaranDokumen5 halamanBest Meat Aspek PemasaranBabas SamasiBelum ada peringkat
- Tugas M-11 Kuesioner Susu UltraDokumen2 halamanTugas M-11 Kuesioner Susu UltraRico Fernando T100% (1)
- Statistik Pengendalian Mutu Pangan 1Dokumen79 halamanStatistik Pengendalian Mutu Pangan 1FauziwitckyBelum ada peringkat
- LAPORAN PRAKTIKUM ERGONOMI - Kelompok5Dokumen31 halamanLAPORAN PRAKTIKUM ERGONOMI - Kelompok5Winda Furoidatul KhusnahBelum ada peringkat
- Laporan Praktek Kerja LapangDokumen144 halamanLaporan Praktek Kerja Lapangrakha fauzanBelum ada peringkat
- Laporan Praktikum Acara 1Dokumen14 halamanLaporan Praktikum Acara 1Roudlotun NafingahBelum ada peringkat
- Draft Proposal PenelitianDokumen7 halamanDraft Proposal PenelitianAziz PoenyaBelum ada peringkat
- Laporan Homogenisasi Dan EmulsifikasiDokumen6 halamanLaporan Homogenisasi Dan EmulsifikasiTri LedianaBelum ada peringkat
- Laporan KPDokumen34 halamanLaporan KPMarselino KarundengBelum ada peringkat
- Laporan PKLDokumen9 halamanLaporan PKLAllyshaBelum ada peringkat
- ANALISIS USAHATANI SAWO (Achras Zapota. L) DI NAGARI SUMPUR KECAMATAN BATIPUH SELATAN KABUPATEN TANAH DATARDokumen1 halamanANALISIS USAHATANI SAWO (Achras Zapota. L) DI NAGARI SUMPUR KECAMATAN BATIPUH SELATAN KABUPATEN TANAH DATARThiyo Sama FarrayBelum ada peringkat
- Resume Jurnal Perencanaan KapasitasDokumen6 halamanResume Jurnal Perencanaan KapasitasHenyBelum ada peringkat
- Review JurnalDokumen3 halamanReview JurnalDebby Andrean Ady MahardikaBelum ada peringkat
- Proposal Kerja Praktek PT - Dua KelinciDokumen18 halamanProposal Kerja Praktek PT - Dua KelinciAnggunAgustyaBelum ada peringkat
- Proposal KPDokumen10 halamanProposal KPZain NarmokoBelum ada peringkat
- Proposal PKM - PenelitianDokumen20 halamanProposal PKM - PenelitianIrwan Setyo50% (2)
- Laporan Tata Letak-Syafira Nur Assyifa B (E1G019009)Dokumen15 halamanLaporan Tata Letak-Syafira Nur Assyifa B (E1G019009)Syafira AssyifaBelum ada peringkat
- Resume Materi Penjabaran Gagasan AwalDokumen1 halamanResume Materi Penjabaran Gagasan AwalZakyKiky100% (1)
- Proteksi Saluran KompleksDokumen40 halamanProteksi Saluran KompleksDwi Cahyanti PutriBelum ada peringkat
- 022 - LPJ - Kelas Advokasi Internal DPMDokumen13 halaman022 - LPJ - Kelas Advokasi Internal DPMAndhika Arya Nugraha100% (1)
- Materi Bahan OrganikDokumen11 halamanMateri Bahan OrganikHeriawan DoankzBelum ada peringkat
- Global Mitra PrimaDokumen8 halamanGlobal Mitra PrimaResmelia SBelum ada peringkat
- BAB V PembahasanDokumen40 halamanBAB V PembahasanHarisHuruWeoBelum ada peringkat
- Uts Elektronika DasarDokumen1 halamanUts Elektronika DasarDima Isratul Riwanda100% (1)
- Perancangan EksperimenDokumen5 halamanPerancangan EksperimenChrist MandalaBelum ada peringkat
- Massa JenisDokumen12 halamanMassa JenisariesugmBelum ada peringkat
- Sistem Pengendalian Umpan BalikDokumen4 halamanSistem Pengendalian Umpan BalikPanji Hastawirata100% (2)
- Trans Ikatan Kimia NeoDokumen16 halamanTrans Ikatan Kimia NeoKeatingDsBelum ada peringkat
- Bagian 7 Transaksi PembayaranDokumen9 halamanBagian 7 Transaksi PembayaranMhiirnhaa ArhmaBelum ada peringkat
- Mata Kuliah KewarganegaraanDokumen8 halamanMata Kuliah KewarganegaraanMhiirnhaa ArhmaBelum ada peringkat
- Bab 12. Strategi BersaingDokumen7 halamanBab 12. Strategi BersaingMhiirnhaa ArhmaBelum ada peringkat
- Bagian 8 Cara Mengajukan PinjamanDokumen9 halamanBagian 8 Cara Mengajukan PinjamanMhiirnhaa ArhmaBelum ada peringkat
- Bab 10. Manajemen ResikoDokumen35 halamanBab 10. Manajemen ResikoMhiirnhaa ArhmaBelum ada peringkat
- 3 Respon Sistem DinamikDokumen12 halaman3 Respon Sistem DinamikMhiirnhaa ArhmaBelum ada peringkat
- Bab 7. Analisis Kelayakan BisnisDokumen20 halamanBab 7. Analisis Kelayakan BisnisMhiirnhaa ArhmaBelum ada peringkat
- Bab 6. Proses Studi Kelayakan BisnisDokumen9 halamanBab 6. Proses Studi Kelayakan BisnisMhiirnhaa ArhmaBelum ada peringkat
- Bab 12. Strategi BersaingDokumen7 halamanBab 12. Strategi BersaingMhiirnhaa ArhmaBelum ada peringkat
- Bab 1. KewirausahaanDokumen18 halamanBab 1. KewirausahaanMhiirnhaa ArhmaBelum ada peringkat
- Bab 1. KewirausahaanDokumen18 halamanBab 1. KewirausahaanMhiirnhaa ArhmaBelum ada peringkat
- Bab 4. Manajemen KewirausahaanDokumen18 halamanBab 4. Manajemen KewirausahaanMhiirnhaa ArhmaBelum ada peringkat