Anda mungkin juga menyukai
- Ring PolinomialDokumen15 halamanRing PolinomialFirmanBelum ada peringkat
- Kumpulan Soal Struktur Aljabar IiDokumen8 halamanKumpulan Soal Struktur Aljabar IiErsya DutaBelum ada peringkat
- Fungsi MultiplikatifDokumen27 halamanFungsi MultiplikatifFashihahBelum ada peringkat
- SKOR ULANGANDokumen6 halamanSKOR ULANGANChoifah UnnesBelum ada peringkat
- (Kelompok 4) 3.4 Algoritma EuclideanDokumen12 halaman(Kelompok 4) 3.4 Algoritma EuclideanAMELIANA MARTINABelum ada peringkat
- Makalah Kelompok 2 - Penerapan PDDokumen6 halamanMakalah Kelompok 2 - Penerapan PDUmayrahBelum ada peringkat
- Matching PDFDokumen6 halamanMatching PDFVincent SiraitBelum ada peringkat
- KESEBIDANGAN GRAPHDokumen21 halamanKESEBIDANGAN GRAPHWith MeBelum ada peringkat
- RANKDANNULITASDokumen7 halamanRANKDANNULITASSukma Puspita RamadhaniBelum ada peringkat
- 01 - 01 Soal Dan Pemb K - Dasar 2007 PDFDokumen16 halaman01 - 01 Soal Dan Pemb K - Dasar 2007 PDFApbdhaBelum ada peringkat
- Latihan 3.2Dokumen9 halamanLatihan 3.2Puspita Dwi WidyastutiBelum ada peringkat
- Ketaksamaan Cauchy SchwarzDokumen2 halamanKetaksamaan Cauchy SchwarzAgus Wayan YuliantoBelum ada peringkat
- Kel 5Dokumen14 halamanKel 5Anonymous 4RwBcIrBelum ada peringkat
- Ruang Vektor Atas LapanganDokumen9 halamanRuang Vektor Atas LapanganSagita AgustiBelum ada peringkat
- Tugas Prinsip Sarang MerpatiDokumen7 halamanTugas Prinsip Sarang MerpatiElza Nora YulianiBelum ada peringkat
- Bab IiDokumen30 halamanBab Iinur hidayahBelum ada peringkat
- Pertemuan 6 KombinatorikDokumen6 halamanPertemuan 6 KombinatorikAnnisa Jamil SyarifahBelum ada peringkat
- SUBRING DAN IDEALDokumen11 halamanSUBRING DAN IDEALAmalia FitrianiBelum ada peringkat
- Kelompok 7Dokumen14 halamanKelompok 7Aluh Mustika DewiBelum ada peringkat
- Transformational Geometry Frank M. EcclesDokumen6 halamanTransformational Geometry Frank M. EcclesAristya DewiBelum ada peringkat
- Metode PiasDokumen10 halamanMetode PiasAdhe El-Durratul JinanBelum ada peringkat
- Topik 2 - KolineasiDokumen15 halamanTopik 2 - KolineasiMade Ika Kusuma WigunaBelum ada peringkat
- PRINSIP SANGKAR BURUNG MERPATIDokumen7 halamanPRINSIP SANGKAR BURUNG MERPATIlatifanurjannahBelum ada peringkat
- (PDF) Bahan-Geometri-TransformasiDokumen45 halaman(PDF) Bahan-Geometri-TransformasiBunga CantiaBelum ada peringkat
- EMT Untuk Perhitungan AljabarDokumen6 halamanEMT Untuk Perhitungan AljabarWilliam Chandra PratamaBelum ada peringkat
- TRANSROTASIDokumen8 halamanTRANSROTASINur Alvi AnnisaBelum ada peringkat
- Isomorfisme Pada GraphDokumen8 halamanIsomorfisme Pada GraphHeri CahyonoBelum ada peringkat
- SA-2201 Matematika Rekayasa II (Pengantar, Vektor Dalam Ruang, Minggu 1)Dokumen25 halamanSA-2201 Matematika Rekayasa II (Pengantar, Vektor Dalam Ruang, Minggu 1)rezpector9Belum ada peringkat
- Sistem Relasi RekursifDokumen12 halamanSistem Relasi Rekursifauliah100% (2)
- Diagonalisasi Orthogonal Dan Matriks Simetriks FIXXXDokumen15 halamanDiagonalisasi Orthogonal Dan Matriks Simetriks FIXXXEmilia Sudiaryani Dewi100% (2)
- Grup Permutasi FiksDokumen8 halamanGrup Permutasi FiksAnnisa Sri Ervina GintingBelum ada peringkat
- Grafik Fungsi TrigonometriDokumen18 halamanGrafik Fungsi TrigonometriYuni Gembo100% (1)
- SPL DAN MATRIKSDokumen25 halamanSPL DAN MATRIKSmaxemon31Belum ada peringkat
- Paper Grup ModuloDokumen7 halamanPaper Grup ModuloAsdmy MyttBelum ada peringkat
- Struktur AljabarDokumen9 halamanStruktur AljabarDharmajaya SoetotoBelum ada peringkat
- Kelompok 1 - Vektor Dalam Ruang Dimensi TigaDokumen26 halamanKelompok 1 - Vektor Dalam Ruang Dimensi TigaBaiq Nelan AyudyaBelum ada peringkat
- TB 2.3 Keterbagian Bilangan BulatDokumen11 halamanTB 2.3 Keterbagian Bilangan Bulatelvira purbaBelum ada peringkat
- Field Dan Karakteristik Ring Tanpa BuktiDokumen7 halamanField Dan Karakteristik Ring Tanpa BuktiMersa KinantyBelum ada peringkat
- DIGRAPHDokumen5 halamanDIGRAPHrositaratnasariBelum ada peringkat
- Matematika Diskrit 1 - Isnaeni - S.Si. - M.SiDokumen28 halamanMatematika Diskrit 1 - Isnaeni - S.Si. - M.SiBang ZhagiBelum ada peringkat
- Matematika NumerikDokumen43 halamanMatematika NumerikVelyaBelum ada peringkat
- Faktor PengintegralanDokumen10 halamanFaktor PengintegralanRizky LuthfieBelum ada peringkat
- Pembahasan Soal Automorfisma 2Dokumen6 halamanPembahasan Soal Automorfisma 2Yuliana RusliiBelum ada peringkat
- Materi Statistika MatematikaDokumen74 halamanMateri Statistika MatematikaArthur ImantokoBelum ada peringkat
- Buku Evaluasi Kelompok 5Dokumen76 halamanBuku Evaluasi Kelompok 5Lusi SulistianiBelum ada peringkat
- Modul Pembelajaran MapleDokumen23 halamanModul Pembelajaran Maplewati ariyantiBelum ada peringkat
- PERSAMAAN DIFERENSIALDokumen6 halamanPERSAMAAN DIFERENSIALFarid Hidayat100% (1)
- Matematika DiskritDokumen2 halamanMatematika DiskritIndri PurnamaBelum ada peringkat
- DiophantineDokumen15 halamanDiophantineni putu candra cahyaniBelum ada peringkat
- Kunci Jawaban Matematika Diskrit Bab 3Dokumen8 halamanKunci Jawaban Matematika Diskrit Bab 3Vinka SalsabilaBelum ada peringkat
- 5.koefisiien BinomialDokumen25 halaman5.koefisiien BinomialTiara AlyaBelum ada peringkat
- Modul 1 Mat EngDokumen58 halamanModul 1 Mat EngSyafira AlyaBelum ada peringkat
- Soal Ring, Field Dan IdealDokumen7 halamanSoal Ring, Field Dan Idealvira mulianaBelum ada peringkat
- BAB V Buku PDDokumen59 halamanBAB V Buku PDAyuhadilestariBelum ada peringkat
- Jawaban Faktorisasi TunggalDokumen2 halamanJawaban Faktorisasi TunggalRismaheistyka100% (1)
- 3 3 Bahan Ajar BAB2 Diktat PSA IIDokumen15 halaman3 3 Bahan Ajar BAB2 Diktat PSA IIKiki Ernanda IIBelum ada peringkat
- Subgrup 1Dokumen28 halamanSubgrup 1titirBelum ada peringkat
- Pertemuan 1-11 Oleh Silfika Alisa (4518103014)Dokumen35 halamanPertemuan 1-11 Oleh Silfika Alisa (4518103014)Silfika Alisa OfficialBelum ada peringkat
- Makalah 10 Matematika Terapan Kel10Dokumen15 halamanMakalah 10 Matematika Terapan Kel10YohannesBelum ada peringkat
- Aljabar LinierDokumen17 halamanAljabar LinierYopi PermanaBelum ada peringkat
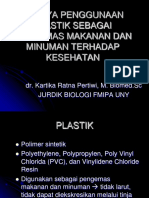
- Bahan-Bahan Plastik DR KarsikaDokumen31 halamanBahan-Bahan Plastik DR KarsikaDiah Ayu RohanaBelum ada peringkat
- Kelmahan Keunggulan PBLDokumen1 halamanKelmahan Keunggulan PBLDiah Ayu RohanaBelum ada peringkat
- PBLDokumen1 halamanPBLDiah Ayu RohanaBelum ada peringkat
- Kelompok 5 MASDokumen30 halamanKelompok 5 MASDiah Ayu RohanaBelum ada peringkat
- Universitas Islam IndonesiaDokumen1 halamanUniversitas Islam IndonesiaDiah Ayu RohanaBelum ada peringkat
- Matdis Kel 2Dokumen13 halamanMatdis Kel 2Diah Ayu RohanaBelum ada peringkat
- Lembar Jawaban SiswaDokumen1 halamanLembar Jawaban SiswaDiah Ayu RohanaBelum ada peringkat
- Masalah ReallstikDokumen1 halamanMasalah ReallstikDiah Ayu RohanaBelum ada peringkat
- Kumpulan Soal UlanganDokumen1 halamanKumpulan Soal UlanganDiah Ayu RohanaBelum ada peringkat
- Contoh WawancaraDokumen1 halamanContoh WawancaraDiah Ayu RohanaBelum ada peringkat
- KeluargaGadunganDokumen5 halamanKeluargaGadunganDiah Ayu RohanaBelum ada peringkat
- Islam Dan SainsDokumen25 halamanIslam Dan SainsDiah Ayu RohanaBelum ada peringkat
- BuramDokumen12 halamanBuramDiah Ayu RohanaBelum ada peringkat
- Elastisitas PermintaanDokumen2 halamanElastisitas PermintaanDiah Ayu RohanaBelum ada peringkat
- Bentuk-Bentuk MudharabahDokumen7 halamanBentuk-Bentuk MudharabahDiah Ayu RohanaBelum ada peringkat
- Makalah Keuangan Kel 12Dokumen23 halamanMakalah Keuangan Kel 12Diah Ayu RohanaBelum ada peringkat
- Masalah ObservasiDokumen2 halamanMasalah ObservasiDiah Ayu RohanaBelum ada peringkat
- Penyususnan Alat Teknik TesDokumen4 halamanPenyususnan Alat Teknik TesDiah Ayu RohanaBelum ada peringkat
- Jadwal KuliahDokumen2 halamanJadwal KuliahDiah Ayu RohanaBelum ada peringkat
- Kelompok 6Dokumen20 halamanKelompok 6Diah Ayu RohanaBelum ada peringkat
- Aljabar Liniear Sistem Persamaan Linier Dan MatriksDokumen16 halamanAljabar Liniear Sistem Persamaan Linier Dan MatriksDiah Ayu RohanaBelum ada peringkat
- Cara Membuat Soal Dengan Type Multiple Choice Di Lectora InspireDokumen4 halamanCara Membuat Soal Dengan Type Multiple Choice Di Lectora InspireDiah Ayu RohanaBelum ada peringkat
- Kelompok 6Dokumen20 halamanKelompok 6Diah Ayu RohanaBelum ada peringkat
- DeskripsiDokumen8 halamanDeskripsiDiah Ayu RohanaBelum ada peringkat
- Presentasi LectoraDokumen6 halamanPresentasi LectoraDiah Ayu RohanaBelum ada peringkat
- Kel 6Dokumen3 halamanKel 6Diah Ayu RohanaBelum ada peringkat
- RM, Alasan, Kesimpulan, DapusDokumen3 halamanRM, Alasan, Kesimpulan, DapusDiah Ayu RohanaBelum ada peringkat
- Pendidikan Di Desaku. Oleh Yuswita Lutfi NaidahDokumen2 halamanPendidikan Di Desaku. Oleh Yuswita Lutfi NaidahDiah Ayu RohanaBelum ada peringkat
- ALIRAN FILSAFATDokumen7 halamanALIRAN FILSAFATDiah Ayu Rohana100% (2)