Anda mungkin juga menyukai
- 3 Getaran Paksa SDOFDokumen20 halaman3 Getaran Paksa SDOFFarhan Ali Rabbani100% (1)
- GeomekanikaDokumen7 halamanGeomekanikaIndah Afrysia PutriBelum ada peringkat
- Tugas Pendahuluan Modul 2Dokumen7 halamanTugas Pendahuluan Modul 2Diana SitanggangBelum ada peringkat
- Muhammad Noer Jayadin - 201810130311124 - Tugas Pendalaman Materi III - 5BDokumen4 halamanMuhammad Noer Jayadin - 201810130311124 - Tugas Pendalaman Materi III - 5BKhairul Jayadi IIBelum ada peringkat
- Pertemuan Ke 9 Fungsi TransferDokumen13 halamanPertemuan Ke 9 Fungsi TransferGABRIEL WINDRIANTO MANURUNG 531212036Belum ada peringkat
- PrintDokumen7 halamanPrintadang garnidaBelum ada peringkat
- MA5161 MatKeu - Sem I 23-24 - 11 - The Efficient FrontierDokumen8 halamanMA5161 MatKeu - Sem I 23-24 - 11 - The Efficient FrontierREZKY MAYA ULFABelum ada peringkat
- Limit Fungsi TrigonometriDokumen19 halamanLimit Fungsi Trigonometri121TRKJJ1Moch Farkhan PrasetiyoBelum ada peringkat
- Filter LC Nisbah AlihDokumen6 halamanFilter LC Nisbah AlihMzs SuradinBelum ada peringkat
- MA5161 MatKeu - Sem I 23-24 - 15 - Metode TrinomialDokumen7 halamanMA5161 MatKeu - Sem I 23-24 - 15 - Metode TrinomialREZKY MAYA ULFABelum ada peringkat
- Tugas Statistika Matematika II - Tugas 1Dokumen8 halamanTugas Statistika Matematika II - Tugas 1Novan Adi NugrohoBelum ada peringkat
- Spektrum Kisi EksperimenDokumen2 halamanSpektrum Kisi EksperimenolanBelum ada peringkat
- Instrumentasi Pengendalian Proses (Contoh Kasus)Dokumen3 halamanInstrumentasi Pengendalian Proses (Contoh Kasus)Yuda SilvianBelum ada peringkat
- Tugas 4 Latihan Proses Stokastik - KELOMPOK 3Dokumen8 halamanTugas 4 Latihan Proses Stokastik - KELOMPOK 3Ayu FitriBelum ada peringkat
- III. LAPLACE TRANSFORM RevisedDokumen35 halamanIII. LAPLACE TRANSFORM Revisedade azmiBelum ada peringkat
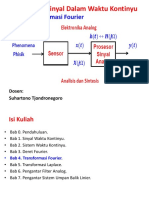
- Pengolahan Sinyal Dalam Waktu Kontinyu: Bab 4. Transformasi FourierDokumen91 halamanPengolahan Sinyal Dalam Waktu Kontinyu: Bab 4. Transformasi FourierFauzan LutfiBelum ada peringkat
- 08 - Dina Ayu Tri Maryana Tugas 4Dokumen5 halaman08 - Dina Ayu Tri Maryana Tugas 4dinaBelum ada peringkat
- DFT Zahwa1Dokumen3 halamanDFT Zahwa1SM 16Belum ada peringkat
- Persamaan DifferensialDokumen33 halamanPersamaan DifferensialpitriBelum ada peringkat
- Aplikasi Statistik Maxwell BoltzmannDokumen5 halamanAplikasi Statistik Maxwell BoltzmannLolika SaputriBelum ada peringkat
- Integral CauchyDokumen7 halamanIntegral CauchyIntania AyuBelum ada peringkat
- Kunci Jawaban Ujian Tengah Semester Semester I 2019/2020Dokumen32 halamanKunci Jawaban Ujian Tengah Semester Semester I 2019/2020Anton TanBelum ada peringkat
- Ujian I Geomekanika - Ahmad Hidayah (H061201001)Dokumen12 halamanUjian I Geomekanika - Ahmad Hidayah (H061201001)Ahmad HidayahBelum ada peringkat
- Aplikasi Integral Tentu, Panjang Kurva & Luas Permukaan Benda PutarDokumen4 halamanAplikasi Integral Tentu, Panjang Kurva & Luas Permukaan Benda PutarIzza AzzahraBelum ada peringkat
- M3-A Representasi Persamaan Status DiskritDokumen21 halamanM3-A Representasi Persamaan Status DiskritDyah Ayu AnggreiniBelum ada peringkat
- Tugas Kelompok - Distribusi Kontinu KhususDokumen17 halamanTugas Kelompok - Distribusi Kontinu KhususBaiq Altin Salsabila NurhubayaBelum ada peringkat
- MOMEN MAGNETIK DALAM TIGA ARAH ORIENTASI - Kelompok 4 (Lolika, Ken Ayu Dan Dian)Dokumen6 halamanMOMEN MAGNETIK DALAM TIGA ARAH ORIENTASI - Kelompok 4 (Lolika, Ken Ayu Dan Dian)Lolika SaputriBelum ada peringkat
- Jawaban UTS Fispeng Maret 2022Dokumen4 halamanJawaban UTS Fispeng Maret 2022jiahahBelum ada peringkat
- Sistem Kontrol Toni Pratama 18157984Dokumen6 halamanSistem Kontrol Toni Pratama 18157984Toni PratamaBelum ada peringkat
- Nomor 4 Mekanika KlasikDokumen3 halamanNomor 4 Mekanika KlasikJoki Nugas GaisBelum ada peringkat
- Makalah DeretDokumen13 halamanMakalah DeretDewi Inka NuraisyahBelum ada peringkat
- Hubungan Termodinamika dan Sifat CairanDokumen4 halamanHubungan Termodinamika dan Sifat CairanTismen Yoga PradanaBelum ada peringkat
- Bab 5. Transformasi Laplace: Pengolahan Sinyal Dalam Waktu KontinyuDokumen120 halamanBab 5. Transformasi Laplace: Pengolahan Sinyal Dalam Waktu Kontinyupasar bulakanBelum ada peringkat
- Gerak Gaya PusatDokumen21 halamanGerak Gaya PusatAnnisa Nur RahmawatiBelum ada peringkat
- MA5161MatKeu - Sem I 23-24 - 6 - Ujian Ke 1 - 9 - 10 - 2023 - JawabanDokumen4 halamanMA5161MatKeu - Sem I 23-24 - 6 - Ujian Ke 1 - 9 - 10 - 2023 - JawabanREZKY MAYA ULFABelum ada peringkat
- RANGKAIAN RLCDokumen7 halamanRANGKAIAN RLCA.nur hikmahBelum ada peringkat
- Proses Waktu Antar KedatanganDokumen16 halamanProses Waktu Antar KedatanganRo'i Khatul jannahBelum ada peringkat
- STURM-LIOUVILLEDokumen4 halamanSTURM-LIOUVILLEmelatyBelum ada peringkat
- Kelompok06 Tugas10 MakalahDokumen5 halamanKelompok06 Tugas10 MakalahIrfan GunawanBelum ada peringkat
- Tutorial Bakal UTSDokumen22 halamanTutorial Bakal UTSPashaBelum ada peringkat
- Materi Kelas Xi PDFDokumen87 halamanMateri Kelas Xi PDFCindy SandovaBelum ada peringkat
- Tugas Fiskom Rangkain RC Dan RLDokumen7 halamanTugas Fiskom Rangkain RC Dan RLMadu BeesonBelum ada peringkat
- 2) Pertemuan 2 Tahap 1 OkDokumen10 halaman2) Pertemuan 2 Tahap 1 OkMeita Puteri HandayaniBelum ada peringkat
- OPTIMASI PEMMODELANDokumen6 halamanOPTIMASI PEMMODELANRosalinda LindaBelum ada peringkat
- Uji derivatif pertama untuk ekstrimDokumen3 halamanUji derivatif pertama untuk ekstrimbambangBelum ada peringkat
- Ihsanata Hamda Hukama - 03031181419012Dokumen9 halamanIhsanata Hamda Hukama - 03031181419012citra afrilianaBelum ada peringkat
- Pengertian Kewirausahaan Menurut para Ahli Dan Pendapat SendiriDokumen10 halamanPengertian Kewirausahaan Menurut para Ahli Dan Pendapat SendiriRiaBelum ada peringkat
- Solusi Po 14 FisikaDokumen13 halamanSolusi Po 14 FisikaKhadijah AlthafunisaBelum ada peringkat
- Tugas 1 Analisis Reaktor NuklirDokumen7 halamanTugas 1 Analisis Reaktor NuklirFuadi nuramalBelum ada peringkat
- Kuis Minggu 5 RL2Dokumen10 halamanKuis Minggu 5 RL2Aziz PradanaBelum ada peringkat
- Ekonomi PencemaranDokumen2 halamanEkonomi PencemaranGorky WilliamBelum ada peringkat
- Spectrum Graf CN Kelompok 10Dokumen5 halamanSpectrum Graf CN Kelompok 10Novita Winda KlaudiaBelum ada peringkat
- Sumur PotensialDokumen23 halamanSumur PotensialAlvenda AndiniBelum ada peringkat
- MRDokumen8 halamanMRElisabeth GultomBelum ada peringkat
- Pengintegralan KompleksDokumen6 halamanPengintegralan Kompleksnasyiatul lailiyahBelum ada peringkat
- Tugas 1 Tahap 4 - Kelompok 4Dokumen6 halamanTugas 1 Tahap 4 - Kelompok 4maulia farahBelum ada peringkat
- InversiDokumen8 halamanInversicahliBelum ada peringkat
- Penjabaran Rumus Benda Jatuh Bebas - Muhammad Ryan Noor Hakim - 4211422061Dokumen3 halamanPenjabaran Rumus Benda Jatuh Bebas - Muhammad Ryan Noor Hakim - 4211422061Muhammad RyanBelum ada peringkat
- DProses Pencabangan 1Dokumen22 halamanDProses Pencabangan 1story tellerBelum ada peringkat
- SISTEM KENDALI LINGKAR TERBUKA DAN TERTAUTDokumen5 halamanSISTEM KENDALI LINGKAR TERBUKA DAN TERTAUTMuhammad Abdul LatifBelum ada peringkat
- Data Mod3Dokumen3 halamanData Mod3Muhammad Abdul LatifBelum ada peringkat
- Studi PustakaDokumen4 halamanStudi PustakaMuhammad Abdul LatifBelum ada peringkat
- HahaDokumen4 halamanHahaaris909Belum ada peringkat
- Bab4 - 3 Analisis StabilDokumen8 halamanBab4 - 3 Analisis StabilMuhammad IrfanBelum ada peringkat