Anda mungkin juga menyukai
- Stabilitas Sistem Tenaga ListrikDokumen46 halamanStabilitas Sistem Tenaga ListrikAli Akmal ZoniBelum ada peringkat
- Stabilitas Sistem Tenaga ListrikDokumen45 halamanStabilitas Sistem Tenaga ListrikOkta Pratama100% (6)
- Sistem Pengaturan BebanDokumen36 halamanSistem Pengaturan BebanFaris Gilang Wahyu Ansharianto100% (2)
- Analisa Aliran Daya Dan Hubung SingkatDokumen27 halamanAnalisa Aliran Daya Dan Hubung SingkatbpiiipiiBelum ada peringkat
- Keadaan TunakDokumen8 halamanKeadaan TunakVidya Amalia HarnindraBelum ada peringkat
- SIMULASI REKONFIGURASI JARINGAN DISTRIBUSI 20kV DI PT PLN (PERSERO) RAYON SUNGAI RUMBAIDokumen60 halamanSIMULASI REKONFIGURASI JARINGAN DISTRIBUSI 20kV DI PT PLN (PERSERO) RAYON SUNGAI RUMBAIHasbulah Ibnu Hasan100% (3)
- Analisa Sistem TenagaDokumen115 halamanAnalisa Sistem TenagageradakBelum ada peringkat
- Relai TeganganDokumen14 halamanRelai Teganganrizky lailaBelum ada peringkat
- Makalah Manajemen PembangkitanDokumen29 halamanMakalah Manajemen PembangkitanYessica Ratri Wiguna100% (3)
- Soal Latihan Diagram ImpedansiDokumen1 halamanSoal Latihan Diagram ImpedansiJoseph100% (1)
- Proposal TransientDokumen5 halamanProposal TransientArief AmranBelum ada peringkat
- Perencanaan Sistem Tenaga ListrikDokumen82 halamanPerencanaan Sistem Tenaga ListrikNUR FAJRI ARDIANSYAH100% (1)
- Operasi Sistem Tenaga Listrik (Rasyid - 105821114917 - l5c)Dokumen55 halamanOperasi Sistem Tenaga Listrik (Rasyid - 105821114917 - l5c)Rasyid100% (1)
- Performence of Tranmission LineDokumen49 halamanPerformence of Tranmission LineAngkit_YardewaBelum ada peringkat
- KURVA BEBAN Hal. 153 - 156Dokumen6 halamanKURVA BEBAN Hal. 153 - 156wakmenBelum ada peringkat
- Materi Laporan Har Bay TrafoDokumen22 halamanMateri Laporan Har Bay TrafoMchmmdagssptra100% (3)
- Sistem InterkoneksiDokumen4 halamanSistem InterkoneksiawangBelum ada peringkat
- Perhitungan Arus Hubung SingkatDokumen12 halamanPerhitungan Arus Hubung SingkatMuhammad Irsyad Parinduri50% (2)
- Overview DIgSILENT PowerFactoryDokumen11 halamanOverview DIgSILENT PowerFactoryWak TacuBelum ada peringkat
- Operasi Sistem Tenaga ListrikDokumen4 halamanOperasi Sistem Tenaga ListrikEnvir Setyadin0% (1)
- 4525 8700 1 SMDokumen6 halaman4525 8700 1 SMAbdul AzizBelum ada peringkat
- 2019-Pengaturan TeganganDokumen23 halaman2019-Pengaturan TeganganRidwan AbdurahmanBelum ada peringkat
- CBR Pembumian Sistem Tenaga ListrikDokumen10 halamanCBR Pembumian Sistem Tenaga ListrikLazy gamer Siahaan100% (1)
- Surja Petir Dan HubungDokumen35 halamanSurja Petir Dan HubungTommy Rekza LabiranBelum ada peringkat
- Pembangkit Interkoneksi PDFDokumen30 halamanPembangkit Interkoneksi PDFArif SusiloBelum ada peringkat
- Sistem Pentanahan Pada Sistem DistribusiDokumen26 halamanSistem Pentanahan Pada Sistem DistribusiSonia SoniaBelum ada peringkat
- Evaluasi Keandalan Sistem Distribusi Tenaga Listrik Berdasarkan Saidi Dan SaifiDokumen7 halamanEvaluasi Keandalan Sistem Distribusi Tenaga Listrik Berdasarkan Saidi Dan SaifiWandy SampulawaBelum ada peringkat
- 02 PentanahanDokumen30 halaman02 PentanahanAri WibowoBelum ada peringkat
- Pembebanan PembangkitDokumen31 halamanPembebanan PembangkitFaizun Alkhair N100% (1)
- Stabilitas Tegangan Dan PraktikumDokumen29 halamanStabilitas Tegangan Dan PraktikumbpiiipiiBelum ada peringkat
- Analisa Keandalan Distribusi Tenaga Listrik Berdasarkan SAIDI Dan SAIFIDokumen47 halamanAnalisa Keandalan Distribusi Tenaga Listrik Berdasarkan SAIDI Dan SAIFIMahesaRivaldi100% (1)
- Makalah Kapasitor BankDokumen34 halamanMakalah Kapasitor BankAssep Setia Satuslamya0% (1)
- PMT, Pms Dan KompressorDokumen385 halamanPMT, Pms Dan Kompressorimpianmengejar4983% (6)
- Analisis Sistem Tenaga ListrikDokumen14 halamanAnalisis Sistem Tenaga ListrikGustifa fauzan100% (10)
- Definisi Dan Prinsip Kerja PMTDokumen8 halamanDefinisi Dan Prinsip Kerja PMTbudi haryono100% (1)
- Proposal Skripsi Juan J. Dimu Rihi (1606030031)Dokumen32 halamanProposal Skripsi Juan J. Dimu Rihi (1606030031)Juan Dimu RihiBelum ada peringkat
- Gejala Medan Tinggi RivaiDokumen33 halamanGejala Medan Tinggi RivaiAndi Maria UlfaBelum ada peringkat
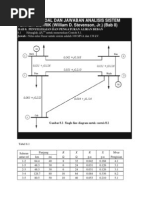
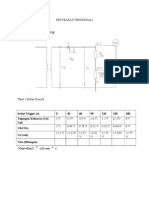
- Kumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Dokumen20 halamanKumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Arief Kurniawan50% (4)
- Review Jurnal PrintDokumen7 halamanReview Jurnal PrintJoeBelum ada peringkat
- Pengertian Daya Aktif Semu Dan ReaktifDokumen12 halamanPengertian Daya Aktif Semu Dan ReaktifGusti Muhammad RidhoBelum ada peringkat
- Pengaturan TeganganDokumen47 halamanPengaturan TeganganFadly Ziqri100% (1)
- Muhammad Luthfiansyah Romadhoni - LAPORAN MAGANG BARUDokumen139 halamanMuhammad Luthfiansyah Romadhoni - LAPORAN MAGANG BARULuthfiansyah RBelum ada peringkat
- Analisa Stabilitas Transient Sistem Tenaga ListrikDokumen17 halamanAnalisa Stabilitas Transient Sistem Tenaga ListrikAngelita SimarmataBelum ada peringkat
- Kestabilan STLDokumen5 halamanKestabilan STLMuhridhajihadBelum ada peringkat
- Mini Research - Faldy D Hasibuan - 5203230012 - SSTL-BDokumen20 halamanMini Research - Faldy D Hasibuan - 5203230012 - SSTL-Brara salsa bila simanjuntakBelum ada peringkat
- Transient Stability of An Electrical Power SystemDokumen6 halamanTransient Stability of An Electrical Power SystemFaraidaBelum ada peringkat
- Stabilitas Sistem TenagaDokumen4 halamanStabilitas Sistem TenagaR Teguh AdhiantoBelum ada peringkat
- Proposal RezaDokumen20 halamanProposal RezaReza AbdillaBelum ada peringkat
- Jurnal Nasional Metode Runge KuttaDokumen9 halamanJurnal Nasional Metode Runge KuttaErwinsyah SitorusBelum ada peringkat
- Definisi Dan Klasifikasi Stabilitas Sistem TenagaDokumen41 halamanDefinisi Dan Klasifikasi Stabilitas Sistem Tenagaazislihawa100% (1)
- 6915 13535 1 SM PDFDokumen8 halaman6915 13535 1 SM PDFJuliawan PutuBelum ada peringkat
- Bab IiDokumen18 halamanBab Iisukma jatiBelum ada peringkat
- Bahan Belajar Ta StabilitasDokumen6 halamanBahan Belajar Ta StabilitasJarhead CompBelum ada peringkat
- Analisis Stabilitas Transient Pada SistemDokumen6 halamanAnalisis Stabilitas Transient Pada SistemGiri WoryantoBelum ada peringkat
- Kelompok 1 - Kestabilan Sudut RotorDokumen23 halamanKelompok 1 - Kestabilan Sudut RotorAwwal Poetraa NiinoneeBelum ada peringkat
- Stabilitas 1Dokumen15 halamanStabilitas 1Rizki RamadhanBelum ada peringkat
- Analisis TransDokumen22 halamanAnalisis TransRasyid AlamBelum ada peringkat
- Bab I PendahuluanDokumen6 halamanBab I PendahuluanRahmadiBelum ada peringkat
- Stabilitas-Sistem-Tenaga-Listrik. Keseimbangan Daya.Dokumen21 halamanStabilitas-Sistem-Tenaga-Listrik. Keseimbangan Daya.Muhammad Rizky AdityaBelum ada peringkat
- Kestabilan Sistem TenagaDokumen8 halamanKestabilan Sistem TenagaDevia Rafika P100% (1)
- Pengertian PLCDokumen24 halamanPengertian PLCYudha SaktiBelum ada peringkat
- Makalah ProteksiDokumen8 halamanMakalah ProteksiYudha SaktiBelum ada peringkat
- Makalah ProteksiDokumen8 halamanMakalah ProteksiYudha SaktiBelum ada peringkat
- Laporan Penyearah TerkendaliDokumen12 halamanLaporan Penyearah TerkendaliYudha SaktiBelum ada peringkat
- Materi Elektronika Daya DC ChoperDokumen7 halamanMateri Elektronika Daya DC ChoperYudha SaktiBelum ada peringkat
- Instalasi Listrik TenagaDokumen19 halamanInstalasi Listrik TenagaYusfik IlhamBelum ada peringkat
- Cara Berani Berbicara Di Depan UmumDokumen2 halamanCara Berani Berbicara Di Depan UmumYudha SaktiBelum ada peringkat
- Bab 3 - 4 - EldaDokumen50 halamanBab 3 - 4 - EldaDwi Agus Setiawan60% (5)