Bab 13 - Theodolite
Diunggah oleh
Yohana KurniawanJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Bab 13 - Theodolite
Diunggah oleh
Yohana KurniawanHak Cipta:
Format Tersedia
ILMU UKUR TANAH 2
13.0.0. Theodolite
Theodolite adalah alat untuk mengukur sudut. Pada pandangan pertama,
alat ini terlihat sebagai suatu alat yang agak rumit. Namun demikian, cara
kerjanya dapat dipelajari dengan lebih cepat jika alat ini dipisah-pisahkan
dalam bentuk bagan (diagram) ke dalam bagian-bagiannya dan masing-
masing dijelaskan secara mandiri.
13.1.0. Penggolongan
Sebuah theodolite umumnya digolongkan menurut cara yang dipakai untuk
membaca lingkaran, kegunaan, dan ketelitiannya. Penggolongan yang
utama adalah menurut cara yang dipakai untuk membaca lingkaran. Cara-
cara tersebut adalah:
1. Vernier
2. Skala optis atau micrometer optis.
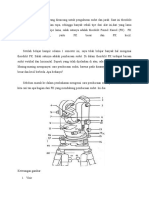
13.1.1. Theodolite Vernier
Seperti tersebut pada namanya, theodolite ini dibaca dengan menggunakan
skala vernier, salah satu skala tambahan, yang memungkinkan pembacaan
sampai 20 detik. Bagian-bagian utama theodolite seperti terlihat pada
gambar 13.1 adalah:
Gambar 13.1. Bagian-Bagian Theodolite
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 264
ILMU UKUR TANAH 2
1. Tripod/ Statif/ Kaki Tiga
Kegunaan tripod adalah untuk mendukung kedudukan theodolite.
Tripod dapat berbentuk teleskopik (mempunyai kaki yang dapat
diubah-ubah panjangnya) atau tripod dapat juga memiliki kaki yang
tetap panjangnya.
2. Landasan Theodolite (Trivet)
Landasan theodolite adalah dasar alat ukur yang datar yang disekrup-
kan pada tripod dan menunjang kaki-kaki skrup penegak
3. Tribrach
Tribrach adalah badan alat ukur yang menunjang seluruh bagian alat
lain. Tribrach ini mempunyai bagian yang berlekuk, dudukan yang
berbentuk seperti kerucut pada mana bagian-bagian alat ukur yang lain
ditumpangkan diatasnya. Jika alat ukur sedang dipakai maka tribrach
harus benar-benar mendatar.
4. Pengaturan penengakan (Leveling Footscrew)
Untuk memungkinkan tribrach ditegakkan, sekrup-sekrup penegak
dipasangkan antara tribrach dengan landasan theodolite. Gerakan-
gerakan sekrup kaki akan mengetengahkan gelembung nivo tabung
piringan yang terletak pada piringan penutup lingkaran mendatar.
Kepekaan nivo tabung ini sekitar 2mm ± 40 detik sudut.
5. Lingkaran Mendatar atau Piringan Bawah
Lingkaran mendatar ini dipasangkan di atas suatu gelondong (spinale)
yang berlekuk. Gelondong ini dipasangkan pada dudukan yang
berlekuk dari tribrach. Gelondong ini bebas berputar dalam tribrach
dan karenanya lingkaran dapat diputar dan dihentikan dalam
sembarang kedudukan. Lingkaran dapat ditahan pada kedudukan ini
dengan menggunakan sekrup pengunci piringan bawah yang jika
dikeraskan akan mengunci dudukan tribrach pada gelondong lingkaran.
Walaupun sekrup pengunci telah dikeraskan, sedikit gerakan masih
mungkin bisa dilakukan dengan sekrup penggerak halus yang juga
disebut sekrup tangensial. Lingkaran mendatar berupa suatu piringan
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 265
ILMU UKUR TANAH 2
logam dengan garis tengah 115mm, dibagi-bagi dengan teliti dalam
bagian-bagian derajat dan dua puluhan menit (20) dan dinomori searah
dengan arah jarum jam selang lima derajat (5) (gambar 13.2)
Gambar 13.2. Skala Vernier
6. Piringan Penutup pada Lingkaran Mendatar atau Piringan Atas
Piringan penutup terletak pada suatu gelondong pusat yang terpasang
dalam dudukan berlekuk dari lingkaran mendatar. Karena itu bisa
bebas berputar terhadap lingkaran yang juga bisa bebas berputar dalam
dudukan tribrach seperti telah diterangkan sebelumnya. Lingkaran
mendatar secara keseluruhan tertutup oleh piringan penutup yang anti
debu. Pembacaan lingkaran dilakukan melalui jendela yang terletak
pada penutup. Suatu tanda penunjuk atau vernier yang tetap
ditempelkan pada piringan penutup dan bergerak di atas lingkaran
mendatar jika piringan penutup diputar (gambar 13.2).
Suatu sekrup pengunci piringan atas tersedia dan berguna untuk
mengunci lingkaran mendatar dan vernier secara bersamaan. Suatu alat
untuk gerakan halus memungkinkan vernier bergerak secara terbatas di
atas lingkaran walaupun sekrup pengunci piringan atas dikunci.
7. Sekrup-Sekrup Pengunci Piringan Atas dan Bawah
Hampir seluruh gerakan theodolite diatur oleh kedua sekrup pengunci
ini dan sekrup gerakan halusnya. Karena itu sangat penting untuk betul-
betul mengerti cara penggunaannya. Jika kedua pengunci terbuka,
piringan atas bebas berputar dan vernier dapat berputar di atas piringan
bawah, yang juga bebas berputar relative terhadap tribrach.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 266
ILMU UKUR TANAH 2
Vernier dapat digerakkan ke sekeliling piringan atas sampai panah
penunjuk terbaca nol atau pembacaan apapun pada piringan bawah.
Jika pengunci piringan atas dikeraskan, hubungan antara vernier dan
piringan bawah akan tetap. Karena itu, keduanya dapat diputar
bersamaan untuk diarahkan pada arah yang diinginkan. Sebagai alat
untuk membidik, sebuah teropong dipasangkan pada piringan penutup.
Karena vernier juga dipasang pada piringan penutup, teropong dan
vernier selalu bergerak bersama-sama. Jika pengunci piringan bawah
dikeraskan pada kedudukan ini, alat ukur tak dapat digerakkan. Jika
pengunci piringan atas dilonggarkan, maka vernier akan berjalan di
atas piringan bawah yang diam. Perbedaan pembacaan pada piringan
bawah menyatakan besarnya sudut.
Pada kenyataannya, terdapat dua vernier pada theodolite vernier.
Vernier-vernier tersebut terletak pada sisi-sisi yang berlawanan dari
garis tengah lingkaran. Karena itu, ketika vernier A mengukur suatu
sudut, tetapi pembacaan yang didapat berbeda 180º dari pembacaan-
pembacaan pada vernier A.
8. Kerangka A atau Standard/Support
Terpasang secara langsung pada piringan penutup adalah kerangka
yang menunjang teropong. Dalam keadaan teropong miring ke atas,
kerangka mempunyai bentuk yang khusus dalam bentuk huruf “A”
(gambar 13.1).
9. Sumbu Pengalihan atau Trunnion
Sumbu pengalihan bertumpu pada badan dudukan dan dikokohkan
kedudukannya oleh sekrup pengunci. Teropong dan lingkaran tegak
bertumpu pada sumbu pengalihan. Ketiganya berputar dalam bidang
tegak tetapi dapat dikunci dalam kedudukan apapun dalam bidang
tersebut oleh suatu pengunci yang dikenal dengan nama pengunci
teropong (gambar 13.3). Sekali lagi, sejumlah gerakan tertentu
dimungkinkan oleh suatu alat penggerak halus.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 267
ILMU UKUR TANAH 2
Gambar 13.3. Pengunci Teropong
Teropong telah dijelaskan secara lengkap, termasuk bagaimana jalan-
jalan sinar masuk dalam teropong, pada bab IX. Suatu persyaratan
umum untuk suatu teropong theodolite vernier adalah:
- Alat pemfokusan dalam yang anti kelembaban dan anti karat
- Jarak pemfokusan terpendek 2m
- Perbesaran 24 kali
- Garis tengah gelas objek 42mm
- Besar sudut lapangan 1º12"
Lingkaran tegak, dengan garis tengah 100mm, ditumpukkan pada
teropong dan dibagi-bagi dalam gelang derajat dan dua puluh menit
seperti terlihat dalam gambar 13.4.a. Seperti halnya lingkaran
mendatar, pembacaan lingkaran tegak dilakukan melalui jendela-
jendela pada piringan penutup lingkaran. Lingkaran tersebut dibaca
dari dua buah vernier, C dan D. Keduanya tetap tidak bergerak ketika
lingkaran berputar, hal mana bertolak belakang dengan metoda
pengukuran sudut mendatar.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 268
ILMU UKUR TANAH 2
Gambar 13.4. Lingkaran Tegak
10. Nivo Tabung Tinggi
Sudut yang diukur dalam suatu bidang tegak harus diukur relatif (nisbi)
terhadap suatu garis yang benar-benar mendatar. Garis tersebut adalah
garis yang melalui panah indeks vernier C dan D dan dipertahankan
dalam kedudukan mendatar oleh nivo tabung tinggi (gambar 13.1).
Dapat dilihat dari diagram bahwa nivo tabung dan vernier C dan D
dipasangkan pada suatu bingkai “T” yang dibuat mendatar dengan
mengaktifkan sekrup penjepit terhadap standard. Nivo tabung tinggi
lebih peka dari pada nivo tabung piringan. Kepekaannya 2mm = 25
detik.
11. Gerakan Pengunting (Centering Motion)
Karena theodolite harus dapat diletakkan tepat di atas titik survey, alat
ini dilengkapi dengan suatu gerakan pengunting yang umumnya
dipasang di atas tribrach untuk bergerak relatif terhadap tribrach.
Karena keseluruhan gerakan hanya 20mm, alat ukur harus ditempatkan
dengan sangat teliti di atas titik survey sebelum gerakan pengunting
dipakai.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 269
ILMU UKUR TANAH 2
12. Pengunting Optis
Pada beberapa theodolite vernier terdapat suatu alat pengunting optis
yang sangat membantu untuk mengunting alat ukur, terutama pada
cuaca yang berangin.
Gambar 13.5 adalah suatu penampang tegak suatu alat pengunting
optis. Jika theodolite didirikan dengan baik dan ditegakkan, pengamat
dapat melihat titik survey di atas tanah melalui lensa pembaca alat
pengunting optis. Garis pandangnya dibelokkan tegak lurus ke bawah
oleh prisma 45º yang ada pada alat pengunting. Gerakan mengunting
memungkinkan theodolite diletakkan secara cepat di atas titik survey.
Gambar 13.5. Pengunting Optis
13.1.2. Theodolite Dengan Skala Optis atau Mikrometer Optis
Dapat dikatakan bahwa dilihat dari luar, sangat sedikit perbedaan antara
theodolite vernier dengan theodolite modern. Yang jelas, metoda-metoda
untuk mendirikan dan mengoperasikan alat ukur adalah sama. Perbedaan-
perbedaan utama adalah sebagai berikut:
1. Ukuran Theodolite
Lingkaran-lingkaran yang lebih kecil sekarang telah dikembangkan dan
teknik-teknik modern telah memungkinkan menandai garis-garis skala
dengan sangat halus. Sebagai akibatnya terjadi pengecilan ukuran
theodolite atau keseluruhan alat mengarah menjadi berkurang besarnya
dan lebih ringan dalam beratnya.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 270
ILMU UKUR TANAH 2
2. Garis-Garis Skala Lingkaran Tegas
Pada theodolite modern tidak ada perjanjian tertentu untuk pembagian
garis-garis skala lingkaran tegak dan setiap theodolite harus diteliti
untuk menentukan system garis-garis skalanya.
Arah-arah mendatar didefenisikan oleh garis-garis skala 0º da 180º,
sedangkan titik zenith dan titik nadir pada 90º dan 270º.
3. Metoda Pembacaan Lingkaran-Lingkaran
Kekurangan utama dari theodolite vernier adalah disamping lensa
pembesar, kesukaran dapat dialami dalam membaca lingkaran-
lingkaran dan menentukan garis skala mana yang berimpit. Jika alat
ukur sudah tua, lingkaran-lingkaran dapat menjadi buram sehingga
kesukaran membaca akan bertambah.
Pada theodolite-theodolite modern, lingkaran-lingkaran dibuat dari
kaca dan standard-standard yang menyangga teropong dan sebagainya
berongga. Karena itu dimungkinkan untuk melewatkan sinar melalui
alat ukur dengan suatu pengaturan prisma seperti dalam gambar 13.6
yang menggambarkan jalan-jalan sinar.
Gambar 13.6. Theodolite Mikrometer Optis
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 271
ILMU UKUR TANAH 2
Dalam gambar, garis ganda yang terbuka mengikuti garis-garis sinar
yang melalui lingkaran mendatar sedangkan garis putus-putus
mengikuti garis-garis sinar yang melalui lingkaran tegak.
Pembacaan kedua lingkaran dilihat melalui lingkaran lensa pembaca
yang terdapat pada bagian luar kanan atas standard. Lingkaran lensa
pembaca tersebut dapat diputar dari satu sisi ke sisi lainnya untuk
penglihatan yang nyaman.
Lensa pembaca berisi tiga bukaan, lingkaran mendatar dan tegak
terdapat pada bukaan yang bertanda H dan V. Seperti pada theodolite
vernier, lingkaran-lingkaran dibagi ke dalam pembagian-pembagian 20
menit. Lingkaran mendatar, seperti terbaca terhadap panah indeks
dalam gambar 13.7a adalah 35º20" + x. Bagian pecahan “x” dibaca
pada bukaan yang ke tiga dengan menggunakan suatu micrometer optis
plan-pararel yang disisipkan ke jalan sinar alat ukur.
Mikrometer plan-pararel adalah suatu kaca segi empat yang sisi-sisinya
sejajar. Dari hukum refraksi, jika garis-garis sinar datang pada arah
tegak lurus kaca tersebut, maka sinar-sinar tersebut melewati kaca
tersebut tanpa dibiaskan. Jika kaca tersebut terungkit, maka garis-garis
sinar akan dibiaskan tetapi sinar yang keluar dari gelas tersebut akan
sejajar dengan sinar datang.
Gambar 13.7. Mikrometer Optis
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 272
ILMU UKUR TANAH 2
Dalam gambar 13.7b, garis-garis sinar dari lingkaran mendatar
melewati piringan plan-pararel yang dalam kedudukan tegak. Piringan
ini secara langsung dihubungkan dengan roda bergerigi dengan suatu
“drum” yang terdapat pada kanan atas standard. Perputaran drum
menyebabkan piringan terungkit dan pembacaan skala utama 3520
dibuat berimpit dengan tanda indeks. Hasil pergeserannya, x, dibaca
dalam menit dan detik pada skala micrometer. Pembacaan lingkaran
mendatar yang terlihat dalam gambar 13.7c adalah:
35º20'
+ 06'40"
= 35º26'40"
13.2.0. Theodolite Type DT 500 dan DT 600
Theodolite Type DT 500 dan DT 600 juga adalah jenis theodolite dengan
Skala Optis atau Mikrometer Optis yang dapat dibaca secara digital. Untuk
penggunaan secara aman, dibawah ini beberapa langkah yang perlu
diperhatikan, yaitu:
A. Peringatan Umum
1. Jangan gunakan alat theodolite pada daerah yang berabu, daerah
yang tidak cukup ventilasi dan daerah yang terlalu dekat dengan
bahan yang mudah meledak.
2. Jangan lakukan perbaikan bagian dalam peralatan karena bisa
menyebabkan terjadinya kebakaran maupun korsleting.
3. Jangan melihat matahari melalui teleskop karena dapat
menyebabkan kerusakan/kebutaan pada mata. Begitu juga, jangan
melihat cahaya matahari yeng dipantulkan pada teleskop melalui
kaca cermin/prisma.
B. Perhatian Umum
1. Jangan gunakan casing alat sebagai tempat untuk berdiri. Casing
alat ini licin dan tidak stabil sehingga orang tersebut dapat
tergelincir dan terjatuh.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 273
ILMU UKUR TANAH 2
2. Jangan masukkan alat ke dalam casing yang pengunci, tali pengikat
dan handlenya sudah rusak. Casing atau alat didalamnya dapat
terjatuh dan dapat melukai pembawanya.
3. Jangan mengayun-ayunkan atau melempar plumb-bob karena dapat
mencederai orang jika terkena.
4. Pastikan pegangan alat terkunci dengan kencang. Jika pegangan
alat dalam keadaan goyang/tidak ketat dapat menyebabkan alat
terjatuh pada saat dipegang dan juga bisa melukai pembawanya.
5. Pastikan clamp tribrach terkunci ketat. Jika tidak terkunci dengan
ketat, tribrach dapat terjatuh pada saat dibawa dan juga bisa
melukai pembawanya.
13.2.1. Power Suply
A. Peringatan
1. Jangan biarkan battery langsung terkena panas atau jangan buang
battery ke dalam api karena dapat menyebabkan terjadinya ledakan.
2. Untuk mencegah terjadinya korsleting pada battery yang sedang
digunakan, isolasi/tutuplah bagian kabel yang terbuka agar tidak
terjadi kebakaran atau percikan api.
3. Jangan gunakan battery yang kena air karena bisa menyebabkan
kebakaran atau percikan api akibat korsleting.
B. Perhatian
1. Jangan pegang cairan yang ada pada battery karena dapat
menyebabkan iritasi pada kulit atau kulit bisa melepuh.
13.2.2. Tripod
A. Peringatan
1. Disaat meletakkan alat di atas dudukan tripod, putarlah dengan ketat
sekrup pengunci. Jika tidak, alat theodolite bisa terjatuh dan juga bisa
melukai pembawanya.
2. Kunci dengan ketat sekrup-sekrup pengunci kaki tripod dimana alat
didudukkan. Jika tidak, tripod dapat terjatuh (collaps) dan juga bisa
melukai penggunanya.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 274
ILMU UKUR TANAH 2
3. Jangan bawa tripod dimana ujung kakinya mengarah kepada orang
lain. Orang tersebut dapat terlukai jika tripod mengenainya.
4. Jauhkan tangan dan kaki dari ujung kaki tripod yang akan
ditancapkan di atas tanah untuk menghindari terjadinya kecelakaan.
5. Pastikan sekrup-sekrup kaki tripod terkunci ketat disaat tripod
dibawa. Jika tidak, kaki tripod dapat memanjang dan bisa melukai
orang.
Perhatian Untuk Pengunci Tribrach (Tribrach Clamp)
1. Pada waktu pengiriman, clamp tribrach dikunci untuk mencegah
pergeseran yang bisa terjadi pada bagian dasar alat. Sebelum
menggunakan alat ini untuk pertama kalinya, bukalah baut pengunci
clamp tribrach tersebut. Dan pada saat dibawa ke proyek, kunci kembali
baut tersebut sehingga posisi clamp tribrach tidak bergeser dari dasarnya.
13.2.3. Perhatian Sehubungan Kerusakan yang diakibatkan oleh air dan debu.
DT500 dibuat mengacu pada spesifikasi IP66 untuk tahan kena air dan
debu disaat battery tertutup dan caps penutup connector terhubung dengan
benar.
1. Pastikan penutup battery tertutup dengan benar dan pasanglah caps
penutup connector dengan benar untuk menghindari DT dari embun
dan partikel debu.
2. Pastikan bahwa embun dan partikel debu tidak berada di bagian dalam
dari penutup battery, terminal maupun bagian connector karena dapat
mengakibatkan kerusakan pada instrument.
3. Pastikan bahwa bagian dalam dari casing alat dan instrumentnya kering
sebelum casing ditutup. Jika butiran air masih ada didalamnya, dapat
menyebabkan instrument berkarat.
4. Jangan pernah meletakkan alat DT langsung di atas tanah atau pasir
karena dapat merusak bagian derat sekrup yang ada, khususnya sekrup
as alat yang terletak di bagian bawah alat.
5. Pastikan alat DT tidak mengalami benturan yang keras dan dari getaran
6. Jangan bawa alat DT diatas tripod
7. Matikan (power off) sebelum mengganti batterynya
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 275
ILMU UKUR TANAH 2
8. Pada saat memasukkan dalam casingnya, keluarkan battery tersebut
dari alat DT dan letakkan ditempat yang tersedia.
13.2.4. Perawatan
1. Selalu bersihkan alat DT sebelum dimasukkan kembali ke casingnya.
Lensa alat membutuhkan perhatian yang khusus. Pertama, bersihkan
lensa dengan menggunakan brush halus agar terhindar dari debu yang
sangat kecil sekalipun. Kemudian, setelah menghembuskan nafas ke
permukaan lensa, sekalah lensa tersebut dengan menggunakan kain
atau tissue yang lembut.
2. Jangan gunakan solvent organik untuk membersihkan layar, keyboard
maupun casing.
3. Simpanlah alat DT diruangan yang kering dan temperatur didalamnya
tetap.
4. Periksalah setiap kaki tripod apakah fit dan sekrupnya masih terkunci.
5. Jika ada bagaian penggerak alat DT yang tidak berfungsi dengan baik,
hubungi dealer SOKKIA.
6. Jika alat DT tidak digunakan dalam jangka waktu yang lama,
periksakan alat tersebut ke agen SOKKIA, setidaknya lakukan
pemeriksaan sekali dalam tiga bulan.
7. Pada saat mengeluarkan alat DT dari casingnya, jangan tarik/keluarkan
alat DT tersebut dengan kuat. Casing tersebut harus benar-benar
tertutup agar terhindar dari kelembaban.
8. Kalibrasi alat DT secara periodik agar akurasi alat DT tersebut tetap
baik.
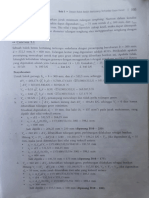
13.2.5. Spesifikasi
Panjang teleskop yang digunakan untuk theodolite type DT 500 adalah
165mm, sedang untuk DT600 adalah 160mm. Aperture DT 500 sebesar
45mm dan DT600 sebesar 35mm. Pembesaran lensa untuk DT500 sebesar
30X dan DT600 sebesar 26X. Resolving power DT500 sebesar 3" dan
DT600 sebesar 3,5". Luasnya daerah yang bisa terlihat melalui teleskop
sebesar 1º30" dan sama untuk kedua type alat di atas. Perbandingan garis
stadia untuk kedua type alat sama, yaitu 1:100. Besarnya minimum sudut
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 276
ILMU UKUR TANAH 2
yang dapat diperlihatkan, untuk DT500 sebesar 1" (0,2mg/0.005mil)/5"
(1mg/0.02mil) dan untuk DT600 sebesar 10" (2mg/0.05mil)/5"
(1mg/0.02mil). Accuracy hasil pengukuran yang bisa didapat oleh DT500
sebesar 5" ISO/DIS 12857-2 (1995) dan untuk DT600 7" ISO/DIS 12857-2
(1995).
13.2.6. Bagian-Bagian dari Instrument
1. Pegangan Alat (Handle)
2. Sekrup Pengunci Handle
3. Tanda Tinggi Alat (Instrument Hight Mark)
4. Penutup Battery (Battery Cover)
5. Data Output Connector
6. Tombol Pengoperasian (Operation Panel)
7. Pengunci Tribrach (Tribrach Clamp)
8. Plat Dudukan ALat ( Base Plate)
9. Sekrup Kaki Pendatar Alat (Levelling Foot Screw)
10. Sekrup Tabung Pendatar Lingkaran (Sircular Level Adjusting Screws)
Gambar 13.10. Bagian-Bagian dari Instrument
11. Tabung Pendatar Lingkaran (Circular Level)
12. Layar Monitor (Display)
13. Lensa Bidik Titik (Optical Plummet Eyepiece)
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 277
ILMU UKUR TANAH 2
14. Pengunci Pengatur Lensa Bidik (Optical Plummet Focussing Ring)
15. Pengatur Lensa Penajam Lingkaran (Optical Plummbet Focussing
Ring)
16. Lensa Objek (Objective Lens)
17. Penggantung Kompas Tabung (Tubular Compass Slot)
18. Pengunci Piringan Horizontal (Horizontal Clamp)
19. Pemutar Halus Piringan Horizontal (Horizontal Fine Motion Screw)
20. Tabung Pendatar Memanjang (Plate Level)
21. Sekrup Tabung Pendatar Memanjang (Plate Level Adjusting
Screw)
22. Pengunci Piringan Vertikal (Vertical Clamp)
23. Pemutar Halus Piringan Vertikal (Vertical Fine Motion Screw).
24. Lensa Bidik Teropong (Telescope Eyepiece)
25. Pengatur Penajam Objek (Telescope Focussing Ring)
26. Pisir (Peep Sight)
27. Titik As Alat ( Instrument Center Mark).
13.2.7. Fungsi-Fungsi Tombol Operasional
Gambar 13.11. Layar Monitor dan Tombol Operasional
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 278
ILMU UKUR TANAH 2
1. Arti Dari Symbol Pada Layar
: Sudut Vertikal ± 90°
: Sudut Vertikal
: Besar Kemiringan Sudut Horizontal (Tilt Angel Conpensation)
: Tanda Kesiapan Power Battery Mark)
: Satuan Sudut Gon (Gon Angle Units)
: Sudut Horizontal Kanan
: Sudut Horizontal Kiri
: Sudut Horizontal Terkunci
2. Tombol Operasional
: Power On
: Power Off
: Pilih Tampilan Mode Sudut Horizontal
: Mempertajam Layar Tampilan
: Tahan dan Aktifkankan Sudut Horizontal
13.2.8. Memasukkan/Mengeluarkan Battery
1. Buka Kunci Penutup Battery. Hati-hati membukanya agar penutup
jangan tertarik terlalu jauh yang mengakibatkan penutup bisa patah.
Gambar 13.12. Membuka Bagian Penutup Battery
2. Masukkan 2 (dua) buah battery ukuran (R14/C) sesuai dengan gambar
yang disediakan.
Gambar 13.13. Cara Memasukkan Battery
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 279
ILMU UKUR TANAH 2
3. Kunci kembali penutup battery.
Gambar 13.14. Cara Mengunci Penutup Battery
Perhatian:
Gantilah battery sebelum alat didirikan/dioperasikan karena alat akan
sedikit berubah walaupun sudah diatur ketegakannya.
13.3.0. Prosedur Mendirikan Instrument
A. Menegakkan Alat (Centering)
1. Dirikan Tripod dengan jarak antar kaki yang seragam dan atur
posisi dudukan alat sedatar mungkin (gbr.13.15).
Gambar 13.15. Cara Mendirikan Tripod
Aturlah posisi tripod agar berdiri persis diatas titik survey.
Kemudian, pastikan kaki tripod sudah tertanam dengan kuat
didalam tanah.
2. Pasang alat di atas dudukan tripod. Sambil memegang alat dengan
satu tangan agar tidak terjatuh, putar sekrup sampai alat terkunci
dengan kuat di atas tripod (gbr. 13.16).
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 280
ILMU UKUR TANAH 2
Gambar 13.16. Cara Mengunci Alat Diatas Dudukan Tripod
3. Lihatlah titik survey melalui lensa bidik sambil memutar sekrup
pengatur (Optical Plummet Eyepiece Screw) untuk memperjelas
bayangan titik survey. Begitu juga putar sekrup pengatur (Optical
Plummet Focussing) untuk memperjelas garis lingkaran agar titik
survey bisa diletakkan persis ditengah-tengah garis lingkaran
tersebut (gbr. 13.17).
Gambar 13.17. Cara Meletakkan Alat Diatas Titik Survey
B. Mendatarkan Alat (Levelling)
1. Atur posisi alat agar titik survey berada ditengah-tengah garis
lingkaran retikul (gbr. 13.18).
Gambar 13.18. Posisi Alat Berada Di atas Titik Survey
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 281
ILMU UKUR TANAH 2
2. Atur buble yang ada pada tabung pendatar lingkaran agar berada
ditengah-tengah lingkaran dengan menaik-turunkan kaki tripod.
Misalnya, panjangkan kaki tripod yang searah dengan as buble
yang letaknya paling jauh dari kaki tersebut atau pendekkan kaki
tripod yang searah dengan as buble yang letaknya paling dekat
dengan kaki tersebut agar posisi buble bisa diletakkan ditengah-
tengah lingkaran (gbr. 13.19.a).
Gambar 13.19.a. Cara Mengatur Buble Tabung Pendatar
3. Buka pengunci piringan horizontal dan sejajarkan tabung pendatar
memanjang dengan kedua kaki alat (AB). Lalu putar kedua sekrup
kaki alat tersebut secara bersamaan baik arah kedalam maupun
keluar agar posisi buble berada ditengah-tengah (3.19.b).
Gambar 13.19.b. Cara Mengatur Buble Tabung Pendatar
4. Putar alat secara horizontal dan berlawanan arah jarum jam sebesar
90º sehingga posisi tabung pendatar memanjang berada tegak lurus
dari garis kaki AB dan kemudian putar sekrup kaki C untuk
mendatarkan bublenya (gbr. 3.19.c).
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 282
ILMU UKUR TANAH 2
Gambar 13.19.c. Cara Mengatur Buble Tabung Pendatar
5. Kemudian, putar kembali alat secara horizontal dan berlawanan
arah jarum jam sebesar 90º dan tabung pendatar memanjang
kembali berada sejajar dengan garis kaki alat (AB). Jika posisi
buble berubah dan tidak lagi berada ditengah, putar kembali sekrup
kaki AB secara bersama-sama dan perlahan-lahan ke arah dalam
atau keluar untuk memindahkan posisi buble separuh dari jarak
yang berubah tadi ke posisi tengahnya dan kemudian putar kembali
alat secara horizontal berlawanan arah jarum jam sebesar 90º dan
putar sekrup kaki C untuk mengetengahkan bublenya (gbr. 3.19.d).
Gambar 13.19.d. Cara Mengatur Buble Tabung Pendatar
6. Putar alat sebanyak dua atau tiga putaran secara horizontal untuk
memastikan posisi alat masih tetap berada ditengah tabung
memanjang tersebut. Jika berubah, lakukan kembali prosedur
pendataran seperti di atas.
7. Jangan lupa memperhatikan apakah titik surveynya masih benar-
benar berada ditengah-tengah alat yang sudah didatar-tegakkan
tersebut. Jika tidak, buka pengunci tribrach. Sambil melihat titik
survey melalui lensa plummet eyepiece, arahkan alat sehingga titik
survey berada ditengah-tengah garis lingkaran. Kemudian,
kencangkan kembali sekrup pengunci tribrach.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 283
ILMU UKUR TANAH 2
8. Check kembali kedatar-tegakan alat. Jika masih berubah, lakukan
kembali prosedur mulai dari langkah ke tiga di atas.
13.4.0. Menajamkan Benang Silang dan Membidik Target.
1. Lihat melalui lensa bidik sampai benang silang terlihat dengan
jelas/tajam pada saat banyangan objek tidak kelihatan. Putar penggerak
lensa bidik searah jarum jam dan kemudian putar secara berlawanan
arah jarum jam secara perlahan-lahan sampai benang silang dapat
terlihat dengan jelas/tajam dan banyangan lainnya tidak kelihatan (gbr.
3.20). Dengan melakukan prosedur ini, tidak diperlukan lagi
pengaturan lensa bidik secara berulang-ulang karena focus mata kita
telah disesuaikan pada jarak infiniti.
Gambar 13.20. Cara Menajamkan Benang Silang
2. Lepaskan pengunci piringan horizontal dan vertikal dan gunakan tanda
pisir untuk mengarahkan teropong ke daerah objek bidikan. Kemudian,
kunci kembali kedua piringan tersebut.
3. Tajamkan bayangan titik survey/objek dengan memutar roda penggerak
focus teropong (telescope focussing ring). Kemudian, putar kedua
penggerak halus piringan untuk mengarahkan teropong tepat di titik
sasaran yang diinginkan dan putaran terakhir yang dilakukan harus
searah dengan arah jarum jam.
4. Putar kembali roda penggerak fokus teropong (telescope focussing
ring) sampai bayangan objek benar-benar terlihat lebih jelas.
5. Hindari terjadinya paralaks/pembiasan bayangan target. Pastikan
bahwa tidak ada pergerakan/perubahan bayangan target walaupun ada
pergerakan mata sedikit keluar dari lensa bidik.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 284
ILMU UKUR TANAH 2
Adanya paralaks/pembiasan ini akan menyebabkan terjadinya kesalahan
pada pembacaan rambu. Jadi, perlu dilakukan pengulangan penajaman
bayangan target sampai benar-benar yakin.
13.5.0. Menghidupkan Alat
Tekan tombol . Pada saat tombol ini ditekan, alat akan melakukan
pengecheckan langsung apakah semua fungsi-fungsinya bekerja secara
normal (gbr. 13.21.a). Setelah itu, peralatan ini siap untuk digunakan.
(a) (b) (c)
Gambar 13.21.Layar Monitor
Ketika item no.3 (Penomoran sudut horizontal) diatur secara manual, pada
layar monitor akan terlihat seperti ini (gbr. 13.21.b) Sedangkan jika item
No.2 (penomoran sudut vertical) diatur secara manual, pada layar monitor
akan terlihat seperti ini (gbr. 13.21.c).
Untuk mengaktifkan fungsi penomoran horizontal secara manual, lepaskan
pengunci piringan horizontal dan putarlah ke kiri dan ke kanan sampai alat
ini berbunyi dan untuk penomoran vertical, lepaskan pengunci piringan
vertical dan putarlah ke atas dan ke bawah. Ketika fungsi penomoran ini
telah aktif, alat ini sudah siap untuk digunakan (gbr. 13.22).
Ketika alat ini tidak benar-benar tegak secara vertical, fungsi penomoran
tidak akan aktif. Oleh karena itu, lakukan kembali pendatar-tegakan alat.
Atau gunakan fungsi No.4 (tilt correction) untuk mematikan (Off) dan
menghidupkan (ON) tilt Vertikal (V) apabila penomoran tidak bisa
diaktifkan karena adanya getaran atau tiupan angin yang kencang (gbr
13.23).
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 285
ILMU UKUR TANAH 2
Gambar 13.22. Cara Mengaktifkan Sudut Horizontal dan Vertikal
Secara Manual
Gambar 13.23. Layar Fungsi Penomoran Tidak Aktif
13.6.0. Mengukur Sudut Horizontal Diatara Dua titik Survey
1. Bidik titik survey nomor satu dengan tepat (gbr. 13.24).
Gambar 13.24. Membidik Titik Survey Nomor Satu
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 286
ILMU UKUR TANAH 2
2. Setelah itu, set sudut horizontal ke 00º00'00" dengan menekan tombol
sebanyak dua kali (gbr. 13.25).
Gambar 13.25. Sudut Horizontal Diset ke 00º00'00"
3. Kemudian arahkan alat ke titik survey nomor dua dan pada layar
monitor akan terlihat berapa besar sudut horizontal diantara kedua titik
tersebut (gbr. 13.26).
Gambar 13.26. Membidik Titik Survey Nomor Dua
13.7.0. Menentukan Sudut Horizontal Yang Diinginkan (Horizontal Angle
Hold).
Fungsi mengunci sudut horizontal dapat digunakan untuk menentukan
besarnya sudut horizontal yang diinginkan.
1. Lepaskan penguncinya dan putarlah alat secara horizontal untuk
mencari besarnya sudut yang diinginkan. Kemudian kunci kembali
sambil memutar sekrup penggerak halus untuk mendapatkan besaran
sudut dalam satuan menit dan detik.
2. Setelah itu, lalu tekan tombol sebanyak dua kali untuk
menahan/hold besaran sudut horizontal tersebut tetap disajikan pada
laya monitor (gbr. 13.27).
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 287
ILMU UKUR TANAH 2
Gambar 13.27. Sudut Horizontal Ditahan/Dihold Pada
Besaran 60º32'20"
3. Arahkan teropong ke titik survey yang menjadi target dengan tepat.
Setelah itu, tekan tombol sekali saja untuk mengaktifkan fungsi
penomoran sudut horizontal. Kemudian, arahkan alat ke titik survey
nomor dua dan pada layar monitor akan terlihat berapa besar sudut
horizontal diantara kedua titik tersebut.
13.8.0. Merubah fungsi Sudut Horisontal/Vertikal pada Layar.
Lakukan pengaturan seperti No.7 untuk sudut horizontal atau vertical. Pada
sudut Horisontal, menekan fungsi akan merubah besar sudutnya, yang
didapat dari arah kiri atau arah kanan pengukuran. Jika pada sudut vertical,
menekan tombol akan merubah tampilan sudut vertikalnya dalam
bentuk angka atau %.
13.9.0. Melakukan Pengukuran Dengan Cara Stadia.
Pada bagian lensa bidik/retikul teropong ada disediakan benang stadia (dua
benang yang vertical dan dua benang lagi yang horizontal) yang digunakan
untuk mengukur jarak ke titik target dan beda tinggi. Besarnya satuan pada
garis stadia 1/100 kali dari jarak lensa fokal teropong (gbr. 13.28).
Gambar 3.28. Benang Stadia
3. Ketika teropong dalam keadaan horizontal (gbr. 13.29):
Jarak horizontal antara titik a dan b : L = 100 x (BA – BB) dan
Beda tinggi titik A dan B : h = (h1 – h2).
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 288
ILMU UKUR TANAH 2
Gambar 13.29. Mencari Jarak Horizontal Antara Dua Titik
4. Jika teropong tidak horizontal (gbr. 13.30):
Jarak horizontal antara titik a dan b:
L = 100 x (BA – BB) x sin2 θz (sudut zenith) atau
L = 100 x (BA – BB) x cos2 θv (sudut vertical)
Dan beda tinggi antara titik A dan B:
h = 50 x (BA –BB) x sin2 θz + h1 – h2 , atau
h = 50 x (BA –BB) x sin2 θv +h1 – h2
Gambar 13.30. Mencari Jarak Antara Dua Titik Dengan
Posisi Teropong Tidak Horizontal
13.10.0. Pemeriksaan Dan Penyetelan
Theodolite DT ini adalah sebuah instrument yang memerlukan penyetelan
yang baik dan benar. Jadi, setiap kali instrument ini hendak digunakan
perlu dilakukan pemeriksaan dan penyetelan sehingga bisa didapat hasil
pengukuran yang akurat. Jadi,
1. Lakukan pemeriksaan dan penyetelan alat ini dengan urutannya seperti
diterangkan di bawah ini.
2. Sebagai tambahan, instrumen ini harus dikalibrasi secara khusus jika
tidak digunakan dalam waktu yang cukup lama.
13.10.1. Buble Pengatur Kedataran Berbentuk Tabung (Plat Level)
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 289
ILMU UKUR TANAH 2
Tabung Buble ini dibuat dari gelas sehingga sangat sensitive terhadap
perubahan temperature dan getaran. Cara Memeriksanya:
1. Datarkan alat seperti yang telah diterangkan pada step 3 s/d 5 Bab
3.3.0. bagian B.
2. Putar Teropong secara horizontal sebesar 180º dan periksa posisi buble
apakah masih tetap berada di tengah. Jika tidak, perlu dilakukan
penyesuaian (gbr. 13.31).
3. Geser buble tersebut sebesar ½ jarak yang berubah tersebut ke arah
tengah dengan menaik-turunkan sekrup kaki pendatar C (gbr. 13.32.a).
Gambar 13.31. Cara Mengatur Buble Pada Tabung Pendatar
4. ½ jarak yang tersisa agar tepat berada di tengah, posisi buble digeser
dengan kunci L untuk memutar bagian pin pengikat tabung kaca. Buble
akan mengikuti arah kemana pin tersebut akan diputar (gbr. 3.32.b).
Gambar 13.32.a. Posisi Buble Pada Tabung Pendatar
Gambar 13.32.b. Cara Menggeser Posisi Buble Dengan Kunci L
5. Ulangi pengaturan tersebut sampai posisi buble tetap berada ditengah
meskipun diputar ke segala arah.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 290
ILMU UKUR TANAH 2
13.10.2. Buble Pengatur Kedataran Berbentuk Lingkaran (Circular Level)
1. Datarkan alat seperti yang telah diterangkan pada step 1 s/d 2 Bab
3.3.0. bagian B.
2. Jika posisi buble tidak tetap berda ditengah
3. Pastikan dimana posisi dari arah buble yang berubah. Kemudian, putar
ke tiga pin pengikat tabung agar arah buble kembali ke tengah
lingkaran (gbr. 13.33).
Gambar 13.33. Cara Menggeser Posisi Buble Circular Level
4. Ketiga pin yang ada diputar hingga besaran gaya memutar yang
diberikan harus sama. Jadi, perlu kehatian-hatian dalam melakukannya
agar tabung bublenya tidak rusak apalagi pecah sehingga tidak dapat
lagi dipergunakan.
13.10.3. Sensor Kedataran (Tilt Sensor)
Jika ada suatu besaran sudut ditunjukkan pada layar yang berbeda
dari besaran tilt angle 0 (zero point), berarti posisi alat tidak benar-benar
dalam keadaan tegak. Hal ini akan mempengaruhi hasil pengukuran yang
dilaksanakan.
Lakukan prosedur di bawah ini untuk menghilangkan kesalahan tilt
zero point.
Theodolite type DT500/DT500S memiliki fungsi tilt sensor ini. Untuk
mengaktifkan fungsi No. 4 (Tilt correction) baik secara horizontal dan
vertikal (H,V), tekan tombol dan secara bersamaan dan pilih
layar no. 4.
Untuk mengganti konstanta tilt zero point error ini:
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 291
ILMU UKUR TANAH 2
1. Secara hati-hati, pasang dan datarkan alat theodolite. Jika perlu,
lakukan secara berulang-ulang untuk mengecheck dan menyesuaikan
kedataran buble.
2. Pada layar, tekan tombol dan secara bersamaan dan pilih
layar no. 10 (instrumen konstan) dan akan terlihat besaran konstanta
yang ada (gbr. 13.34).
.
Gambar 13.34. Tampilan Layar Nomor 10
3. Dengan akurat, bidik sebuah titik target berlawanan arah jarum jam.
4. Tunggu beberapa saat agar posisi instrument stabil, kemudian baca
dan catat hasil sudut konpensasi X1 dan Y1 yang akan ditampilkan
secara otomatis.
5. Buka sekrup pengunci piringan vertikal dan putar teropong secara
vertikal sebesar 180º. Kemudian, buka sekrup pengunci piringan
horizontal dan secara akurat arahkan ke titik target semula searah
jarum jam .
6. Tunggu beberapa saat agar posisi instrument stabil, kemudian baca
dan catat hasil sudut konpensasi X2 dan Y2 yang akan ditampilkan
secara otomatis.
7. Hitung nilai perbedaannya (offsetnya) untuk mendapatkan nilai tilt
zero point error nya
X offset = (X1 +X2)/2
Y offset = (Y1 + Y2)/2
Jika salah satu dari ke dua nilai offset ini jauh lebih dari ±20”, ganti
nilai faktor dengan mengikuti cara di bawah ini. Jika nilai offsetnya
masih berada disekitaran ±20”, perbaikan nilai konstanta tidak perlu
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 292
ILMU UKUR TANAH 2
dilakukan. Kemudian, Tekan tombol dan secara bersa-
maan untuk kembali ke fungsi layar awal.
Cara memasukkan nilai konstanta tilt zero point error yang baru
8. Untuk memasukkan dan menyimpan nilai X2 dan Y2 yang baru, tekan
tombol .
9. Buka sekrup pengunci piringan vertikal dan putar teropong secara
vertikal sebesar 180º. Kemudian, buka sekrup pengunci piringan
horizontal dan secara akurat arahkan ke titik target semula searah
jarum jam .
10. Tunggu beberapa saat agar posisi instrument stabil, kemudian baca
dan catat hasil sudut konpensasi X1 dan Y1. Untuk menyimpan nilai
tersebut, tekan kembali tombol (gbr. 13.35).
Gambar 13.35. Tampilan Layar Konstanta Tilt Zero Point
Error Yang Baru
11. Pastikan bahwasanya perbedaan ke dua nilai konstanta yang ada
masih berada dikisaran 444 ± 33. Kemudian, tekan tombol . Jika
perbedaan ke dua nilai konstanta tsb berada jauh dari kisaran
tersebut, silahkan hubungi agen Sokkia.
Untuk melakukan pengecekan ulang
12. Aktifkan fungsi No. 10 seperti dijelaskan di atas.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 293
ILMU UKUR TANAH 2
13. Tunggu beberapa saat agar posisi instrument stabil, kemudian baca
dan catat hasil sudut konpensasi X3 dan Y3 yang ditampilkan secara
otomatis.
14. Buka sekrup pengunci piringan vertical dan putar teropong secara
vertical sebesar 180º. Kemudian, buka sekrup pengunci piringan
horizontal dan secara akurat arahkan ke titik target semula searah
jarum jam.
15. Tunggu beberapa saat agar posisi instrument stabil, kemudian baca
dan catat hasil sudut konpensasi X4 dan Y4 yang akan ditampilkan
secara otomatis.
16. Hitung nilai perbedaannya (offsetnya) untuk mendapatkan nilai tilt
zero point error nya
X offset = (X1 +X2)/2
Y offset = (Y1 + Y2)/2
Jika salah satu dari ke dua nilai offset ini jauh lebih dari ±20”, ganti
nilai factor dengan mengikuti cara di bawah ini. Jika nilai offsetnya
masih berada disekitaran ±20”, perbaikan nilai konstanta tidak perlu
dilakukan. Kemudian, Tekan tombol dan secara bersa-
maan untuk kembali ke fungsi layar awal. Jika setelah, pengujian
dilakukan beberapa kali dan hasilnya tetap jauh dari kisaran ±20”,
segera hubungi agen Sokkia untuk melakukan perbaikannya.
13.10.4. Lensa Reticle
Untuk memeriksa ketegakkan dari lensa reticle pada secara horizontal
1. Secara hati-hati, tegakkan alat
2. Bidik sebuah target, misalnya sudut dari atap bangunan pada titik A
dari garis lensa reticle.
3. Gunakan penggerak halus sudut vertical untuk menggerakkan letak
sudut atap bangunan tersebut pada titik B dari garis lensa reticle.
Jika pada pergerakan tersebut masih tetap parallel terhadap garis
vetikal , tidak perlu dilakukan perbaikan pada kedudukan lensa reticle.
Jika tidak, segera hubungi agen Sokkia untuk perbaikan.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 294
ILMU UKUR TANAH 2
Untuk memeriksa ketegakan dan kedataran garis lensa reticle
1. Tetapkan target pada sebuah titik berjarak ± 100m dari alat Theodolite.
2. Tegakkan dan datarkan alat secara hati-hati. Kemudian, hidupkan alat
dan set sudut pada layar untuk vertical 90º00'00" dan horizontal
00º00'00".
3. Setelah alat di set, arahkan teropong pada titik target berlawanan arah
jarum jam. Baca dan catat hasilnya, misalnya:
Sudut Horizontal A1 = 18º34'00", dan
Sudut Vertikal A1 = 90º30'20".
4. Buka sekrup pengunci piringan vertikal dan putar teropong secara
vertikal sebesar 180º. Kemudian, buka sekrup pengunci piringan
horizontal dan secara akurat arahkan ke titik target semula searah jarum
jam. Baca dan catat hasilnya misalnya:
Sudut Horizontal A2 = 198º34'20", dan
Sudut Vertikal A1 = 269º30'00".
5. Lakukan perhitungan A2 – A1 dan B2 + B1.
Jika hasil perhitungan A2 – A1 masih berada diantara 180º±40" dan B2
+ B1 masih berada diantara 360º±40", penyesuaian tidak perlu
dilakukan.
Contoh:
A2 – A1 (sudut horizontal) = 198º34'20" - 18º34'00" = 180º00'20"
B2 – B1 (sudut vertikal) = 269º30'00"- 90º30'20"= 360º00'20".
Jika perbedaan yang ada sangat besar meskipun pengujian telah dilakukan
beberapa kali, silahkan hubungi agen Sokkia.
13.10.5. Optical Plumet
Untuk mengecheck posisi optical plummet,
1. Dengan akurat, datarkan alat Theodolite dan letakkan alat tepat berada
di atas titik target, ditengah lingkaran optical plummet.
2. Putar bagian atas alat Theodolite 180º secara horizontal dan periksa
apakah titik target masih tetap berada ditengah lingkaran optical
plummet (gbr. 13.36.a).
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 295
ILMU UKUR TANAH 2
Gambar 13.36.a. Posisi Alat Tepat Di atas Titik Target
Jika titik target masih tetap berada ditengah lingkaran optical plummet,
penyesuaian tidak perlu dilakukan. Jika tidak, penyesuaian perlu
dilaksanakan.
Untuk melaksanakan penyesuaian:
3. Perbaiki separuh jarak kesalahan dengan memutar kaki sekrup pendatar
(gbr. 13.36.b).
Gambar 13.36.b. Memperbaiki Posisi Optical Plummet
4. Buka penutup optical plummet
5. Dengan menggunakan ke empat sekrupnya, hilangkan sisa jarak
kesalahan tersebut hingga titik target tepat berada ditengah lingkaran
optical plummet.
Bila titik target berada di bawah atau di atas lingkaran optical plummet,
seperti terlihat pada gambar, turunkan sekrup bagian bawah dan
naikkan sekrup bagian atas dengan putaran yang sama sampai titik
target berada di tengah lingkaran optical plummet (gbr. 13.36.c).
Gambar 13.36.c. Menaik-Turunkan Sekrup Atas-Bawah Optical
Plummet
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 296
ILMU UKUR TANAH 2
Gambar 13.36.d. Menaik-Turunkan Sekrup Kiri-Kanan Optical
Plummet
Bila titik target berada di samping kiri/kanan dari lingkaran dan masih
tetap berada di tengah garis, naik turunkan sekrup bagian kiri dan kanan
dengan putaran yang sama (gbr. 13.36.d) sampai titik target berada di
lingkaran tengah optikal plummet (gbr. 13.36.e).
Gambar 13.36.e. Posisi Alat Tepat Di atas Titik Target
a.Plum bob (Unting-unting)
Plum bob (unting-unting) dapat digunakan untuk membantu
meletakkan alat di atas titik target jika keadaan angin cukup tenang.
Untuk menggunakan plum bob, buka gulungan benangnya melewati
grip yang ada dan sangkutkan pada pengait yang ada di sebelah bagian
bawah alat (gbr. 13.37).
Gambar 13.37. Cara memanjangkan benang Plum Bob
13.11.0. Pengukuran Suatu Sudut Mendatar (Pengukuran Satu Seri Ganda)
Jika secara tepat diletakkan di atas titik survey dan ditegakkan dengan
benar, theodolite dapat digunakan dalam dua cara, yaitu:
a. Kedudukan Biasa
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 297
ILMU UKUR TANAH 2
b. Kedudukan Luar Biasa
Alat ukur dikatakan dalam kedudukan biasa, jika lingkaran tegak terletak
pada bagian kiri pengamat. Untuk membidik objek yang sama, pada
kedudukan luar-biasa, pengamat harus memutar alat ukur secara
horizontal/mendatar sebesar 180º sampai lensa pengamat kira-kira
mengarah ke target. Kemudian teropong diputar secara vetikal sehingga
membuat sisi objektif teropong menghadap target. Lingkaran vertikal
sekarang berada disebelah kanan pengamat. Langkah ini dikenal sebagai
pengalihan target (transmitting).
Untuk mengukur sudut PQR, alat ukur diatur pada kedudukan biasa dan
langkah-langkah berikut dilakukan.
1. Untuk mengaktifkan fungsi penomoran horizontal secara manual,
lepaskan penguncinya dan putarlah piringan horizontal ke kiri dan ke
kanan sampai alat ini berbunyi dan untuk penomoran vertikal, lepaskan
penguncinya dan putarlah piringan vertikal ke atas dan ke bawah.
Ketika fungsi penomoran ini telah aktif, alat ini sudah siap untuk
digunakan.
2. Pada kedudukan biasa, arahkan alat ukur ke titik target P (gbr. 13.38).
3. Setelah itu, set sudut horizontal ke 00º00'00" dengan menekan tombol
sebanyak dua kali.
4. Buka pengunci piringan horizontal dan secara hati-hati arahkan alat ke
titik target R. Kunci kembali piringan horizontal lalu baca hasilnya
(65º25'00").
5. Arahkan alat ukur ke titik target (P)
6. Setelah itu, set sudut horizontal ke 00º00'00" dengan menekan tombol
sebanyak dua kali.
7. Buka pengunci sudut vertikal dan putar teropong secara vertikal untuk
berada pada kedudukan luar biasa. Kemudian, buka pengunci piringan
horizontal dan putar alat searah jarum jam ke arah titik target P. Kunci
kembali piringan horizontal lalu baca hasilnya (seharusnya
180º00'00").
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 298
ILMU UKUR TANAH 2
8. Buka pengunci piringan horizontal dan secara hati-hati arahkan alat ke
titik target R. Kunci kembali piringan horizontal lalu baca hasilnya
245º25'20" (seharusnya 245º25'00"). .
9. Pada kedudukan biasa, cari besaran sudut 180º00'00". Tekan tombol
sebanyak dua kali. Kemudian, buka pengunci piringan horizontal
dan arahkan alat kembali ke titik P. Setelah benar-benar tepat di titik
target P, kunci piringan horizontal. Tekan tombol sekali saja
untuk mengaktifkan. Kemudian, sekrup pengunci piringan horizontal
dibuka kembali dan arahkan kembali alat ke titik target R. Baca
hasilnya 245º25'00".
10. Pada kedudukan biasa, cari besaran sudut 180º00'00". Tekan tombol
sebanyak dua kali. Kemudian, buka pengunci piringan horizontal
dan arahkan alat kembali ke titik P. Setelah benar-benar tepat di titik
target P, kunci piringan horizontal. Tekan tombol sekali saja
untuk mengaktifkan.
11. Buka pengunci sudut vertikal dan putar teropong secara vertical untuk
berada pada kedudukan luar biasa. Kemudian, buka pengunci piringan
horizontal dan putar alat searah jarum jam ke arah titik target P. Kunci
kembali piringan horizontal lalu baca hasilnya (seharusnya 00º00'00").
12. Kemudian, sekrup pengunci piringan horizontal dibuka kembali dan
arahkan kembali alat ke titik target R. Baca hasilnya 65º25'20"
(seharusnya 65º25'00"). Kedua pembacaan dicatat dalam tabel pada
baris 1 (lihat tabel 13.1.). Pada kedudukan biasa, data berada pada
kolom 3 dan 4. Pada kedudukan luar biasa, data berada pada kolom 4
dan 5.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 299
ILMU UKUR TANAH 2
P R
65º25'00"
Gambar 13.38. Pengukuran Sudut Horizontal Dengan
Cara Reiterasi
Tabel 13.1. Pengukuran Sudut Horizontal Cara Biasa dan Luar Biasa
Tempat Titik Cara Biasa Cara Luar Biasa
Alat Rata-Rata
Bidikan Vernier A Vernier B Vernier A Vernier B
Ukur
1 2 3 4 5 6 7
Baris 1 P 00º00'00" 180º00'00" 180º00'00" 00º00'00"
Baris 2 R 65º25'00" 245º25'00" 245º25'20" 65º25'20"
Baris 3 65º25'00" 65º25'00" 65º25'20" 65º25'20" 65º25'10"
Besar sudut PQR didapat dengan mengurangkan pembacaan-
pembacaan pada target sebelah kanan dari pembacaan-pembacaan
sebelah kiri. Secara efektif, ini berarti mengurangkan pembacaan pada
baris 2 dengan baris 1. Sebagai contoh:
Sudut PQR = 65º25'00" - 00º00'00" = 65º25'00", dan
Sudut PQR = 245º25'00" - 180º00'00" = 65º25'00".
Kedua harga sudut tersebut terlihat pada baris ke 3 dalam kolom biasa.
13. Dikarenakan bermacam-macam cacat kecil pada alat ukur, ketidak
sempurnaan penyetelan alat, dan kekurangan-kekurangan pada
penglihatan dan sentuhan manusia, kesemuanya akan diselidiki
kemudian. Sudut tersebut harus dicheck dengan pembacaan pada
kedudukan luar biasa. Teropong dialihkan (transitted), sekrup piringan
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 300
ILMU UKUR TANAH 2
atas dibuka dan teropong diarahkan pada target R. Penempatan yang
teliti pada target dilakukan dan sekrup pengunci dikencangkan.
Karena piringan bawah tetap terkunci, vernier A harus harus terbaca
245º25'00" sedangkan pembacaan pada vernier B harus 65º25'00".
Dikarenakan karena bermacam-macam kekurangan seperti tersebut
diatas, pembacaan-pembacaan tersebut dapat berbeda sedikit dari harga
di atas. Dalam setiap kasus, pembacaan-pembacaan tersebut dicatat,
dan dimasukkan dalam buku catatan data ukur tanah baris 2, luar biasa
kolom 5 dan 6
14. Sekrup pengunci piringan atas tersebut dibuka kembali. Alat ukur
diputar dengan hati-hati kearah titik P dan ditepatkan pada target
dengan teliti. Sekrup pengunci kemudian dikencangkan dan pembacaan
vernier dicatat. Pembacaan-pembacaan dimasukkan pada baris 1, luar
biasa kolom 5 dan 6
15. Besar sudut PQR adalah perbedaan antara pembacaan-pembacaan pada
titik kiri P dan titik kanan R. Pembacaan pada baris 1 kemudian
dikurangi dari baris 2 seperti sebelumnya.
Sudut PQR = 245º25'20" - 65º25'20" = 180º00'00"
16. Rata-rata keempat harga sudut tersebut diterima sebagai nilai yang
paling mungkin dari sudut tersebut, yaitu, sudut PQR = 65º25'10"
(kolom 7)
Perlu dicatat bahwa jika suatu sudut diukur menggunakan theodolite
dengan suatu micrometer optis, pembacaan-pembacaan vernier A dan
vernier B diganti oleh sebuah pembacaan; karena itu keempat kolom,
kolom 3 s/d kolom 6 diganti dengan dua kolom, cara biasa dan cara
luar biasa. Metode pengukuran sudut horizontal seperti ini disebut
pengukuran satu seri ganda. Sudut yang didapat bebas dari cacat pada
instrument dan ketidak sempurnaan penyetelan, sedangkan kesalahan
pengamat yang kecil telah diminimalkan.
13.12.0. Metode Reiterasi
Jika suatu harga sudut yang lebih teliti diperlukan, langkah-langkah
pengukuran diatas harus diulangi, yaitu sudut tersebut harus diukur berkali-
kali. Metode tersebut dikenal sebagai metode reiterasi dalam pengukuran.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 301
ILMU UKUR TANAH 2
13.13.0. Metode Repitisi
Untuk mengurangi banyaknya pembacaan pada lingkaran, suatu metode
pengukuran dikenal sebagai penambahan pengulangan atau repetisi
pembacaan yang dilakukan. Metode ini mempunyai nilai yang khusus jika
sudut-sudut kecil seperti sudut XYZ dalam gambar 13.39 akan diukur.
Langkah-langkahnya adalah sebagai berikut:
1. Untuk mengaktifkan fungsi penomoran horizontal secara manual,
lepaskan penguncinya dan putarlah piringan horizontal ke kiri dan ke
kanan sampai alat ini berbunyi dan untuk penomoran vertikal, lepaskan
penguncinya dan putarlah piringan vertikal ke atas dan ke bawah.
Ketika fungsi penomoran ini telah aktif, alat ini sudah siap untuk
digunakan.
2. Pada kedudukan biasa, arahkan alat ukur ke titik target X.
3. Setelah itu, set sudut horizontal ke 00º00'00" dengan menekan tombol
sebanyak dua kali.
4. Buka pengunci piringan horizontal dan secara hati-hati arahkan alat ke
titik target Z. Kunci kembali piringan horizontal lalu baca hasilnya
(02º06'02").
5. Tekan tombol sebanyak dua kali. Kemudian, buka pengunci
piringan horizontal dan arahkan alat kembali ke titik X. Setelah benar-
benar tepat di titik target P, kunci piringan horizontal. Tekan tombol
sekali saja untuk mengaktifkan. Kemudian, sekrup pengunci
piringan horizontal dibuka kembali dan arahkan kembali alat ke titik
target Z. Pembacaan pada alat ukur sekarang menjadi dua kali harga
sudut tersebut, tetapi tidak dicatat.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 302
ILMU UKUR TANAH 2
Gambar 13.39. Pengukuran Sudut Horizontal PQR Dengan
Cara Repetisi
6. Ulangi langkah 5 beberapa kali dan harga sudut-sudut tersebut akan
ditambahkan pada lingkaran. Jika, katakanlah, setelah 6 kali
pengukuran lingkaran dibaca dan besarnya 12º36'18" didapat, maka
besar sudut rata-ratanya adalah:
1236'18"
7. Sudut XYZ = 6
02 06'03"
8. Ulangi kembali pengukuran sudut tersebut untuk enam kali juga pada
kedudukan luar biasa dan dapatkan besar sudut rata-ratanya dengan
mengurangkan pembacaan pertama pada titik X dari pembacaan akhir
pada titik Z dan bagilah hasil terbut dengan enam. Katakanlah XYZ =
02º06'03".
1
9. Harga akhir XYZ = 0206'03"0206'07" 0206'05"
2
Harus dicatat bahwa pada seluruh pengukuran di atas tidak perlu dimulai
pada besaran sudut 00º00'00".
13.14.0. Pengukuran Suatu Sudut Tegak (Vertikal)
Harus diingat bahwa susunan theodolite adalah sedemikian sehingga
lingkaran tegak (vertikal) berputar dengan teropong dan vernier tetap tidak
bergerak. Sudut tegak diukur dari garis tersebut ke arah panah indeks
vernier. Garis ini dibuat mendatar dengan mengetengahkan gelembung
nivo tabung ketinggian. Karena itu sumbu gelembung harus sejajar dengan
garis yang melalui tanda indeks vernier.
Sangat sering hal ini tidak terjadi dan semua sudut tegak harus diukur
dalam kedudukan biasa dan luar biasa. Langkah-langkahnya adalah sebagai
berikut:
1. Atur alat ukur pada kedudukan biasa dan gerakkan gelembung nivo
vertikal ketengah dengan sekrup penjepit
2. Impitkan dengan teliti pada target dan cek apakah gelembung nivo
tetap berada ditengah. Umumnya gelembung akan bergeser dari
tengahnya sehingga harus diketengahkan kembali sebelum membaca
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 303
ILMU UKUR TANAH 2
vernier C dan D. Catat pembacaan vernier masukkan pada kolom 3 dan
4 (Tabel 13.2)
3. Alihkan transit (teropong) dan bidik kembali target. Check apakah
gelembung nivo tabung vertical tetap berada ditengah dan jika tidak,
coba diketengahkan lagi. Baca vernier untuk C dan D dan masukkan
pembacaan-pembacaannya dalam kolom 5 dan 6 pada tabel.
4. Harga rata-rata dari keempat pembacaan vernier tersebut diterima
sebagai sudut tegak (vertical).
kolom 1 kolom 2 kolom 3 kolom 4 kolom 5 kolom 6 kolom 7
TITIK BIASA LUAR BIASA
RATA-
TARG VERNIER VERNIER VERNIER VERNIER
ALAT RATA
ET C D C D
ALAT B 07º50' 00" 07º49' 40" 07º50' 20" 07º50' 00" 07º50' 00"
Tabel 13.2. Pengukuran Sudut Vertikal
Langkah-langkah untuk pengukuran sudut tegak pada theodolite modern
sama dengan pada theodolite dengan vernier. Gambar 13.40,
memperlihatkan metode pembagian ini dan karena hanya ada satu
pembacaan pada setiap kedudukan, pembacaan biasa sudut tegak adalah
07º49'56".
Jika pembacaan pada kedudukan luar biasa ada, maka pembacaan harus
172º10'04" sebab jumlah pembacaan biasa dan luar biasa adalah
180º00'00". Karena ketidaksempurnaan penyetelan alat ukur, pembacaan
pada kedudukan luar biasa pada semua kemungkinan akan berbeda dari
harga 180º00'00" dengan suatu besaran yang dikenal sebagai kesalahan
indeks.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 304
ILMU UKUR TANAH 2
Gambar 13.40. Skala Sudut Vertikal
Jika pembacaan yang sebenarnya pada kedudukan luar biasa adalah
172º09'56", maka kesalahan indeks dan sudut tegak vertical yang
didapat, yaitu:
Pembacaan pada kedudukan biasa : 07º49'56"
Pembacaan pada kedudukan luar biasa : 172º09'56"
Jumlah : 179º59'52"
Salah Indeks : -08"
Salah indeks dibagi dua dan suatu koreksi sebesar +4” diberikan pada
kedua pengukuran sudut untuk menjadikan`jumlahnya menjadi
180º00'00".
Pembacaan pada kedudukan biasa yang telah
dikoreksi : 07º50'00"
Pembacaan pada kedudukan luar biasa yang telah
dikoreksi : 172º10'00"
Jumlah : 180º00'00"
Hasil pembacaan pada kedudukan biasa diambil sebagai sudut tegak,
yaitu, 07º50'00" (sudut miring).
Jika suatu sudut zenith yang diamati dengan theodolite ini jumlah
pembacaan biasa dan luar biasa 540º00'00". Sebagai contoh:
Pembacaan pada kedudukan biasa : 330º25'10"
Pembacaan pada kedudukan luar : 209º35'02"
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 305
ILMU UKUR TANAH 2
biasa
Jumlah : 180º00'00"
Salah indeks : +12"
Pembacaan pada kedudukan biasa
yang telah dikoreksi : 330º25'10" - 6"
Pembacaan pada kedudukan luar biasa : 330º25'04"
Sudut tegak : 360º - '330º25'04"
Salah indeks : 29º34' 56" (Suduth Zenith)
13.15.0. Kesalahan-kesalahan yang mempengaruhi Pengukuran Sudut
Kesalahan-kesalahan yang mempengaruhi pengukuran sudut dapat dibagi
menjadi dua golongan:
1. Ketidak sempurnaan penyetelan
2. Kesalahan pengamat
13.15.1. Ketidak sempurnaan penyetelan alat mempengaruhi sudut mendatar
Jika suatu theodolite sempurna dalam penyetelannya, hubungan antara
bermacam-macam sumbu harus seperti terlihat pada gambar 13.41, yaitu:
a. Sumbu tegak I harus betul-betul tegak dan tegak lurus pada gelembung
piringan
b. Garis kolimasi teropong harus tegak lurus pada sumbu tegak II (transit
axis)
c. Sumbu tegak II harus tegak lurus pada sumbu tegak alat ukur
Hubungan-hubungan di atas dapat terganggu karena pemakaian yang
berkesinambungan atau kesalahan pemakaian. Oleh karena itu, pengetesan
harus dilakukan sebelum memulai suatu pekerjaan yang besar dan
kemudian pada selang waktu tertentu harus dilakukan kalibrasi agar
penyetelan alat ukur dapat benar-benar sempurna.
Bermacam-macam test dan penyetelan yang harus dilakukan adalah
sebagai berikut:
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 306
ILMU UKUR TANAH 2
A. Sumbu tegak harus benar-benar tegak lurus pada sumbu gelembung
piringan
Pengetesan
a. Tegakkan tripod dengan kuat dan sekrupkan theodolite. Aturlah
nivo tabung piringan di atas dua sekrup dan ketengahkan
gelembung. Jika alat ukur tidak pada penyetelan yang baik malah
sumbu tegak akan miring sebesar e dan seperti terlihat pada gambar
13.42.a.
b. Putar alat ukur sebesar 90 dan ketengahkan kembali gelembung
c. Ulangi langkah-langkah di atas sampai gelembung tetap berada di
tengah-tengah pada kedudukan 1 dan 2
d. Putar alat ukur sampai 180 dari kedudukan 1. Sumbu tegak akan
tetap miring dengan kesalahan e dan gelembung nivo tabung tidak
akan ketengah. Sumbu tegak akan miring terhadap bidang mendatar
sebesar sudut 2e (gambar 13.42.b.), jumlah skala n pada mana
gelembung bergeser dicatat.
Penyetelan
e. Putar sekrup kaki sampai gelembung bergerak kembali ke arah
pusat dengan besar n/2 skala, yaitu dengan setengah kesalahan.
Sumbu tegak sekarang benar-benar tegak (gambar 13.42.c.)
f. Stel nivo tabung dengan melonggarkan sekrup pengungkit dan
tinggikan atau rendahkan salah satu ujung nivo tabung sampai
gelembung benar-benar ditengah. Dengan demikian, setengah n/2
kesalahan akan dihilangkan (gambar 13.42.d.) dan nivo tabung
akan tegak lurus sumbu tegak.
Pengaruh Ketidak Sempurnaan Penyetelan
Pengaruh kemiringan sumbu tegak tidak begitu membahayakan dan
pada kenyataannya ketidak sempurnaan yang kecil yang pada
umumnya terjadi tak berpengaruh terhadap pengukuran dengan
theodolite konvensional. Tidak ada langkah-langkah pengamatan yang
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 307
ILMU UKUR TANAH 2
dapat diterapkan untuk menghilangkan kesalahan ini. Oleh karena itu,
kesalahan ini dapat diabaikan
Gambar 13.41. Macam-Macam Sumbu
Gambar 13.42. Menyetel Sumbu Tegak
Gambar 13.43. Garis Kolimasi
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 308
ILMU UKUR TANAH 2
B. Garis kolimasi teropong harus tegak lurus pada sumbu ke dua.
Garis kolimasi didefenisikan sebagai garis hubung pusat optis lensa
objective dengan benang silang tegak diafragma. Jika kedudukan
diafragma telah terganggu, garis kolimasi akan membuat sudut dengan
sumbu II (gambar 13.43) dengan kesalahan sebesar e dalam garis
kolimasi.
Pengetesan:
1. Setelah pengaturan alat ukur dengan baik pada suatu titik I, bidiklah
detail/tanda yang terdefenisikan dengan baik (A) yang berjarak
sekitar 100 meter dan tutup kedua sekrup pengunci. Sekarang garis
bidik akan tertuju pada target seperti gambar 13.44.a.
2. Alihkan (transit) teropong dan bidiklah rambu B yang diletakkan
mendatar berjarak sekitar 100 meter pada sisi alat ukur yang lain
dari A.
Catatlah pembacaan, 2,100m pada gambar 13.44.b. Karena sumbu
ke dua dan garis bidik membentuk sudut (90 – n) dan karena sumbu
II kedudukannya tetap jika teropong dialihkan, maka garis bidik
terungkit dari garis lurus sebesar 2e.
3. Ubah alat ukur pada kedudukan 1B dan kembali bidik tanda A
(gambar 13.44.c.)
4. Alihkan teropong dan bidik rambu B. Garis bidik akan kembali
terungkit dari garis lurus AB sebesar 2e tetapi pada sisi yang lain
dari garis. Pembacaan rambu kembali dicatat dan pada gambar
13.44.d. adalah 2,00m
5. Jika kedua pembacaan rambu sama, maka alat ukur sudah distel
dalam keadaan sempurna, dimana titik A, I, dan B sudah
membentuk satu garis.
Penyetelan
6. Jika pembacaan rambu berbeda, kesalahannya menunjukkan
kesalahan 4e, yaitu 4e = (2,100 -2,000) = 0,100 pada kasus ini.
Pada permulaan telah diperlihatkan bahwa besarnya kesalahan
adalah e, karena itu e = (0,100/4) = 0,025m
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 309
ILMU UKUR TANAH 2
Kesalahan ini dihilangkan dengan menggeserkan benang silang tegak
ke pembacaan rambu (2,000 + e) = 2,025m. Ini dapat dilakukan dengan
menggunakan sekrup penyetel yang saling berlawanan yang terletak,
masing-masing sebuah, pada setiap sisi diafragma. Pada kasus ini
diafragma harus digeserkan ke kanan (gambar 13.45). Sekrup yang kiri
dilonggarkan sedikit dan sekrup yang kanan dikeraskan sampai
pembacaan rambu yang benar didapat.
Jika benang silang menjadi tidak tegak lagi, diafragma perlu
dilonggarkan dari kuncian dan diputar sedikit demi sedikit sampai
benar-benar tegak. Ketegakan ini umumnya dicheck terhadap garis
unting-unting
Pengaruh ketidak sempurnaan Penyetelan
Jika alat ukur dipakai dalam keadaan ketidak sempurnaan penyetelan,
setiap sudut akan dihinggapi kesalahan. Namun demikian, seperti akan
jelas pada gambar 13.44, harga rata-rata pembacaan biasa dan luar
biasa akan menjadi benar. Sebagai contoh, pembacaan rambu tengah =
1
2,100 2,000 2,050m adalah kedudukan B yang betul karena
2
garis bidik menyimpang dengan 2e pada kedua sisi dari kedudukan
rata-rata untuk keadaan biasa dan luar biasa.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 310
ILMU UKUR TANAH 2
Gambar 13.44. Menyetel Garis Kolimasi
Gambar 13.45. Diafragma
C. Sumbu II harus betul-betul mendatar jika sumbu I tegak.
Jika penyetelan alat ukur tidak sempurna, sumbu II tidak akan
mendatar. Dalam gambar 13.46, kesalahannya adalah e. Jika teropong
dimiringkan, benang silangnya akan bergerak sepanjang bidang yang
digambarkan dengan garis putus-putus, yaitu suatu bidang tegak lurus
pada sumbu ke II tetapi bukan bidang tegak.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 311
ILMU UKUR TANAH 2
Gambar 13.46. Sumbu II Tidak Datar
Pengetesan
1. Letakkan alat ukur pada sumbu I dan tegakkan dengan baik.
Bidikkan pada titik A pada ketinggian sekitar 60º. Tutup kedua
sekrup pengunci piringan atas dan bawah seperti pada gambar
13.47.a.
2. Bidikkan teropong pada rambu mendatar atau skala yang diletakkan
pada tanah dasar objek A. Catat pembacaan “b”.
3. Ulangi langkah-langkah di atas pada kedudukan luar biasa untuk
mendapatkan pembacaan kedua “c” pada skala. Jika penyetelan alat
ukur telah sempurna, kedua pembacaan akan sama.
Penyetelan
4. Jika pembacaan “b” dan “c” berbeda, harga rata-ratanya tetap betul
karena teropong akan bergerak diatas bidang pada setiap
kemiringan sudut e pada kedua sisi garis tegak.
Dengan menggunakan sekrup penggerak halus piringan atas atau
bawah, aturlah alat ukur pada pembacaan menengahnya
5. Putarlah teropong ke atas sampai bidang silang mendatar
memotong titik A. Benang silang tegak akan terletak disamping
titik A.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 312
ILMU UKUR TANAH 2
6. Gerakkan benang silang tegak sampai berimpit dengan titik A
dengan menggunakan sekrup penyetel sumbu II yang terletak di
bawah sumbu I
7. Bidikan kembali teropong ke bawah. Jika penyetelan telah
dilakukan dengan benar, pembacaan benang silang harus pada
pembacaan menengah rambu
Pengaruh Ketidaksempurnaan Penyetelan
Sudut-sudut yang diukur antara titik-titik dengan perbedaan tinggi yang
besar akan salah. Namun demikian, seperti ditunjukkan pada gambar
13.47, harga menengah pembacaan biasa dan luar biasa adalah benar.
Perlu dicatat bahwa hampir semua theodolite modern tidak dilengkapi
dengan penyetelan ini. Sistem optis yang sangat rumit membuat
penyetelan sangat sukar. Walaupun begitu, karena alat ukur-alat ukur
tersebut dibuat dengan derajat ketelitian yang tinggi, maka penyetelan
ini umumnya tidak perlu. Disamping itu, harga menegah pembacaan
biasa dan luar biasa akan saling meniadakan kesalahannya.
Gambar 13.47. Cara Mengetest Sudut Vertikal Alat
13.16.0. Penyetelan Alat Ukur Yang Tidak Sempurna Mempengaruhi Sudut
Tegak
Hanya satu ketidak sempurnaan yang secara material mempengaruhi
pengu-kuran sudut tegak. Seperti telah dijelaskan, sudut tegak diukur dari
suatu garis kearah tanda indeks pada vernier. Karena itu, jika teropong
pada kedudukan mendatar panah indeks harus membaca nol dan karena
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 313
ILMU UKUR TANAH 2
panah-panah indeks tersebut diikatkan pada nivo tabung ketinggian,
gelembung nivo tabung ketinggian harus terletak ditengah.
Pengetesan
1. Tegakkan alat ukur pada I pada kedudukan biasa. Ketengahkan
gelembung nivo tabung ketinggian dan baca suatu rambu tegak pada A
dengan pembacaan vernier lingkaran tegak nol. Catat pembacaan,
misalnya 1,500m (gambar 13.48.a)
2. Ulangi Pekerjaan pada I pada kedudukan luar-biasa. Catat pembacaan
rambu, misalkan 1,400m (gambar 13.48.b).
Penyetelan
3. Kata-kata pembacaan pada rambu itu benar karena pengamatan biasa
terungkit ke atas dan pengamatan luar biasa terungkit ke bawah dengan
kesalahan yang sama, “e”. Dengan menggunakan sekrup gerakan halus
tegak teleskop diputarkan sampai kepembacaan rata-rata 1,450m
(gambar 13.48.c).
4. Pada vernier tidak akan terbaca nol kembali dan harus dinolkan dengan
sekrup penjepit yang mengontrol nivo tabung ketinggian dan vernier.
5. Pergerakan sekrup penjepit akan menggerakkan gelembung dari
kedudukan tengahnya. Gelembung diketengahkan kembali dengan
menyetel sekrup pengungkit yang terletak pada salah satu ujung nivo
tabung (gambar 13.48.d).
Pengaruh ketidak sempurnaan penyetelan
Jika alat ukur penyetelannya tidak sempurna, maka seluruh pembacaan sudut
tegak akan dihinggapi kesalahan. Walaupun begitu, gambar 13.48 secara
jelas menunjukkan bahwa harga rata-rata pembacaan pada kedudukan biasa
dan luar biasa menjadi betul.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 314
ILMU UKUR TANAH 2
Gambar 13.48. Cara Mengetest Sudut Vertikal Alat
13.17.0. Kesalahan-Kesalahan Karena Pengamat dan Kesalahan-Kesalahan
Lain
Kesalahan-kesalahan karena pengamat dapat dibagi dalam dua golongan,
yaitu:
1. Kesalahan Blunder
Ini adalah kesalahan-kesalahan yang dilakukan pengamat dikarenakan
pengabaian, ketidak hati-hatian atau kecapaian. Termasuk didalamnya
membidik target yang salah, pengukuran sudut berlawanan arah dengan
arah jarum jam, memutar sekrup yang salah, membuka kunci yang
salah, kesalahan pembacaan lingkaran, dan kesalahan dalam penulisan
pada buku ukur.
Kesalahan-kesalahan tersebut hanya dapat dihindari dengan
pengamatan secara hati-hati dan dengan mengamati setiap sudut paling
tidak dua kali. Hanya dengan ini kesalahan akan tampak. Adalah sama
sekali tak berguna untuk mengukur sudut apapun hanya pada
kedudukan biasa atau luar biasa saja sebab itu akan mengakibatkan
kesalahan yang paling parah seperti yang disebutkan di atas.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 315
ILMU UKUR TANAH 2
2. Kesalahan Acak
Kesalahan-kesalahan kecil tak dapat dihindarkan. Hal tersebut
disebabkan karena ketidak sempurnaan sentuhan dan pandangan
manusia yang membuat tidak mungkin menepatkan pada target secara
teliti atau untuk membaca vernier secara tepat.
Kesalahan-kesalahan tersebut kecil dan tidak begitu berarti. Kesalahan-
kesalahan tersebut diminimumkan dengan melakukan beberapa penga-
matan dan kemudian dirata-ratakan.
Sumber-sumber kesalahan lain adalah tidak samanya muai-susut
berbagai bagian alat ukur karena pengaruh cahaya matahari, ketidak
stabilan alat ukur pada cuaca yang berangin, panas, embun atau kabut
yang mempengaruhi pandangan, dan ketidak telitian dalam
penguntingan (centring) alat ukur.
Kesalahan-kesalahan tersebut hanya dapat dihindari dengan melindungi
alat ukur terhadap angin atau matahari dan memilih waktu untuk
pengamatan yang cocok.
Akhirnya, jika alat ukur tidak diunting dengan benar, tak ada yang
dapat dilakukan untuk menghilangkan atau meminimumkan kesalahan-
kesalahan yang harus terjadi. Perhatian yang penuh harus diarahkan
untuk penegakan alat ukur diatas titik survey dengan teliti.
Ringkasan
Secara umum, kesalahan blunder tidak dapat dihilangkan atau
diminimumkan oleh cara pengamatan apapun. Hanya pengukuran
pengimbang yang dapat menunjukkan bahwa kesalahan tersebut ada.
Walaupun begitu, adalah cukup jika pengamat dapat mengambil
langkah-langkah untuk mencari kesalahan tersebut. Suatu kesalahan
dalam pengurangan tidak memerlukan pengulangan pengukuran, tetapi
kesalahan-kesalahan blunder yang lain dan secara umum pengukuran
pengimbang yang lengkap harus dilakukan.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 316
ILMU UKUR TANAH 2
Kesalahan Sistematik
Timbul karena cacat atau ketidaksempurnaan penyetelan alat ukur.
Telah diperlihatkan bahwa pada hampir semua kasus suatu pengukuran
pengimbang pada sudut akan saling menghilangkan kesalahan-
kesalahan tersebut. Perkecualian adalah jika sumbu tegak tidak benar-
benar tegak, kesalahan tak dapat dihilangkan. Walaupun begitu,
kesalahan-kesalahan tersebut adalah kesalahan-kesalahan orde kedua
dan tidak mempengaruhi pengukuran theodolite biasa.
Kesalahan-Kesalahan Acak (Random)
Yang kecil tidak dapat dihilangkan. Dengan pengukuran pengimbang
(yang hanya dapat meminimumkan kesalahan) dan harga rata-rata dari
beberapa pengukuran itu akan sangat teliti.
Tak dapat ditekankan bahwa pengukuran pengimbang harus dilakukan
pada setiap sudut tanpa memperhatikan kepentingannya. Jika tidak,
hasil pengukuran akan menjadi tak tentu yang menyebabkan tak
berarti.
TEKNIK SIPIL POLITEKNIK NEGERI MEDAN 317
Anda mungkin juga menyukai
- Bab 13 - TheodoliteDokumen53 halamanBab 13 - TheodoliteAnnisa Fitri100% (2)
- TeodolitDokumen6 halamanTeodolitManzilul HudaBelum ada peringkat
- Makalah Ilmu Ukur TanahDokumen14 halamanMakalah Ilmu Ukur Tanahlast shelterBelum ada peringkat
- Akuisisi Data Pemetaan DigitalDokumen19 halamanAkuisisi Data Pemetaan DigitalhpbBelum ada peringkat
- Fungsi Bagian-Bagian TheodolitDokumen5 halamanFungsi Bagian-Bagian Theodolitkusmira agustianBelum ada peringkat
- TheodoliteDokumen12 halamanTheodoliteNanda PrayogaBelum ada peringkat
- BAB II TheodolithDokumen13 halamanBAB II TheodolithAhmadGunawanBelum ada peringkat
- Laporan Centering, Smb.i Vertikal Dan Pembacaan SudutDokumen22 halamanLaporan Centering, Smb.i Vertikal Dan Pembacaan SudutMade Sapta Hadi0% (1)
- Laporan IUT TheodolitDokumen15 halamanLaporan IUT TheodolitMnabilul umamBelum ada peringkat
- Alat Ukur Waterpass Dan TheodolitDokumen10 halamanAlat Ukur Waterpass Dan TheodolitAndy PrasetiaBelum ada peringkat
- Peralatan IUTDokumen29 halamanPeralatan IUTgiokarsten halimBelum ada peringkat
- THEODOLITDokumen6 halamanTHEODOLITEriant Yosua CrishmanBelum ada peringkat
- ALAT Ilmu Ukur Tanah 2Dokumen35 halamanALAT Ilmu Ukur Tanah 2titinBelum ada peringkat
- Modul IUT 3baruDokumen35 halamanModul IUT 3baruJohn Hendrik FransBelum ada peringkat
- Pembuktian SegitigaDokumen20 halamanPembuktian SegitigaNabilah FildzahBelum ada peringkat
- Cara Penggunaan Theodolit DigitalDokumen8 halamanCara Penggunaan Theodolit DigitalAlexander Simatupang Geo100% (1)
- Handasah DEWILLA ANATASYA 19045009Dokumen8 halamanHandasah DEWILLA ANATASYA 19045009Dewila AnatasyaBelum ada peringkat
- Alat Ukur TanahDokumen7 halamanAlat Ukur Tanahain_nurrofiqBelum ada peringkat
- Modul Praktik IUT D4-2019Dokumen53 halamanModul Praktik IUT D4-2019John Hendrik FransBelum ada peringkat
- Laporan PerpetaanDokumen97 halamanLaporan PerpetaanTitin CahyaniBelum ada peringkat
- TheodoliteDokumen12 halamanTheodoliteRobertus Bellarminus Seto AdinugrohoBelum ada peringkat
- Alat Yang Digunakan Dalam PengukuranDokumen10 halamanAlat Yang Digunakan Dalam Pengukuranairul bastianBelum ada peringkat
- Isi TheodolitDokumen17 halamanIsi TheodolitNur Aini Prabasari NBelum ada peringkat
- Rinto Alat Ukur Tanah RevDokumen23 halamanRinto Alat Ukur Tanah Revivana petraciaBelum ada peringkat
- Cara Menggunakan TheodolitDokumen14 halamanCara Menggunakan Theodoliti shakrawyBelum ada peringkat
- Tugas 1 Perpetaan Makalah Moh - ZenDokumen9 halamanTugas 1 Perpetaan Makalah Moh - ZenEin JeanBelum ada peringkat
- Prinsip Kerja TheodolitDokumen7 halamanPrinsip Kerja TheodolitNandangHermansyah SaktiKusumahBelum ada peringkat
- MODUL THEODOLITE - Kelompok 4Dokumen15 halamanMODUL THEODOLITE - Kelompok 4Maizan Rin DalwainBelum ada peringkat
- Pengenalan TheodolitDokumen22 halamanPengenalan TheodolitTeuku IlhamBelum ada peringkat
- Pengenalan Theodolit PDFDokumen22 halamanPengenalan Theodolit PDFTeuku IlhamBelum ada peringkat
- Ilmu UkurDokumen6 halamanIlmu UkurAdiListianaBelum ada peringkat
- Laporan Praktikum Teodolit 2019Dokumen10 halamanLaporan Praktikum Teodolit 2019Reosa AndikaBelum ada peringkat
- Penyipat RuangDokumen12 halamanPenyipat RuangFajarRizkiBelum ada peringkat
- Bagian Bagian Theodolit Dan FungsinyaDokumen18 halamanBagian Bagian Theodolit Dan FungsinyaRavi Meirandi PutraBelum ada peringkat
- Makalah TheodoliteDokumen39 halamanMakalah TheodoliteAstrin Monica100% (5)
- Laporan Akhir Praktikum Perpetaan GF 1-7 TheodoliteDokumen19 halamanLaporan Akhir Praktikum Perpetaan GF 1-7 TheodoliteFirsta Arianty KamandikaBelum ada peringkat
- YanaYoannita 1205875 Handasah 2Dokumen11 halamanYanaYoannita 1205875 Handasah 2yholaafridaBelum ada peringkat
- Pesawat Penyipat DatarDokumen12 halamanPesawat Penyipat DatarAsya KireinaBelum ada peringkat
- Modul Xi PL Semester 2Dokumen4 halamanModul Xi PL Semester 2siti mardtiahBelum ada peringkat
- Theodolite OokkDokumen14 halamanTheodolite OokkridofambudiBelum ada peringkat
- Bab 2 Iuw-1Dokumen25 halamanBab 2 Iuw-1Brama prayudaBelum ada peringkat
- Bahan Laporan TeodoloidDokumen14 halamanBahan Laporan TeodoloidDeny DemoBelum ada peringkat
- Hanistyas Widoretno - 111.140.183 Kelas E. Bab 3 AlatDokumen7 halamanHanistyas Widoretno - 111.140.183 Kelas E. Bab 3 AlatHanistyas WidoretnoBelum ada peringkat
- Laporan Centering, Smb.i Vertikal Dan Pembacaan SudutDokumen22 halamanLaporan Centering, Smb.i Vertikal Dan Pembacaan SudutMade Sapta Hadi100% (1)
- Pengukuran Teknik Kelompok 1 Tentang Pengukuran OptisDokumen13 halamanPengukuran Teknik Kelompok 1 Tentang Pengukuran OptisSilvia NurBelum ada peringkat
- Cara Menggunakan TeodolithDokumen5 halamanCara Menggunakan TeodolithJoko PurwantoBelum ada peringkat
- Bagian Bagian Theodolit Dan FungsinyaDokumen3 halamanBagian Bagian Theodolit Dan Fungsinyaashparabi100% (2)
- Jawaban TP PemtopDokumen6 halamanJawaban TP PemtopPunten BuuBelum ada peringkat
- TeodolitDokumen10 halamanTeodolitAndry WirawanBelum ada peringkat
- Materi HandasahDokumen10 halamanMateri HandasahRezki Amaliah0% (1)
- Artikel TheodolitDokumen6 halamanArtikel TheodolitOliz Adityaraka0% (1)
- Laporan PraktikumDokumen18 halamanLaporan PraktikumTaufiq JoeniorBelum ada peringkat
- Perbedaan Theodolite Dengan WaterpassDokumen15 halamanPerbedaan Theodolite Dengan Waterpasstegar100% (1)
- TeodolitDokumen8 halamanTeodolitBernard SidabutarBelum ada peringkat
- TheodoliteDokumen9 halamanTheodoliteTobi Suhendra DinattaBelum ada peringkat
- S.7.3 FDokumen2 halamanS.7.3 FYohana KurniawanBelum ada peringkat
- Tugas S.5.1Dokumen3 halamanTugas S.5.1Yohana KurniawanBelum ada peringkat
- Tugas S.5.1Dokumen3 halamanTugas S.5.1Yohana KurniawanBelum ada peringkat
- Tugas S.5.1Dokumen3 halamanTugas S.5.1Yohana KurniawanBelum ada peringkat
- Tugas S.5.7Dokumen9 halamanTugas S.5.7Yohana KurniawanBelum ada peringkat
- Tugas S.5.1Dokumen3 halamanTugas S.5.1Yohana KurniawanBelum ada peringkat
- S.7.3 FDokumen2 halamanS.7.3 FYohana KurniawanBelum ada peringkat
- 05 AlatBrt Vol GalTimbDokumen10 halaman05 AlatBrt Vol GalTimbYohana KurniawanBelum ada peringkat
- Soal Dan Soal Latihan Bab 5 Balok GeserDokumen8 halamanSoal Dan Soal Latihan Bab 5 Balok GeserYohana Kurniawan100% (2)
- Desain Geser Pada BalokDokumen23 halamanDesain Geser Pada BalokYohana KurniawanBelum ada peringkat
- Alat Berat Pada Pekerjaan TanahDokumen12 halamanAlat Berat Pada Pekerjaan TanahGalih Armintario0% (1)
- 03 AlatBrt Sifat Fisik MaterialDokumen5 halaman03 AlatBrt Sifat Fisik MaterialYohana KurniawanBelum ada peringkat
- Balok Susun Dengan Penahan Geser Bag 1Dokumen8 halamanBalok Susun Dengan Penahan Geser Bag 1Yohana KurniawanBelum ada peringkat
- 04 AlatBrt Kinerja MesinDokumen12 halaman04 AlatBrt Kinerja MesinYohana KurniawanBelum ada peringkat
- 05 AlatBrt Vol GalTimbDokumen10 halaman05 AlatBrt Vol GalTimbYohana KurniawanBelum ada peringkat
- Bab 16. PolygonDokumen29 halamanBab 16. PolygonYohana KurniawanBelum ada peringkat
- 01 AlatBrt PendahuluanDokumen4 halaman01 AlatBrt PendahuluanYohana KurniawanBelum ada peringkat
- MBAB2Dokumen12 halamanMBAB2Yohana KurniawanBelum ada peringkat
- 02 AlatBrt Jenis Dan FungsiDokumen20 halaman02 AlatBrt Jenis Dan FungsiYohana KurniawanBelum ada peringkat
- Mbab3 1Dokumen6 halamanMbab3 1Yohana KurniawanBelum ada peringkat
- Mbab3 2Dokumen16 halamanMbab3 2Yohana KurniawanBelum ada peringkat
- MBAB1Dokumen4 halamanMBAB1Yohana KurniawanBelum ada peringkat
- Bab 11. Kontur-2Dokumen22 halamanBab 11. Kontur-2Yohana KurniawanBelum ada peringkat
- Bab 15. KompasDokumen16 halamanBab 15. KompasHabel Diamond TariganBelum ada peringkat
- Bab 14. TacheometryDokumen28 halamanBab 14. TacheometryYohana KurniawanBelum ada peringkat
- ImanDokumen21 halamanImanImanuel GintingBelum ada peringkat
- Struktur Batang TarikDokumen5 halamanStruktur Batang TarikYohana KurniawanBelum ada peringkat
- Sambungan Dengan Baut Yang Dilengkapi MurDokumen9 halamanSambungan Dengan Baut Yang Dilengkapi MurYohana KurniawanBelum ada peringkat
- Momen Lentur Dan Gaya Aksial TekanDokumen1 halamanMomen Lentur Dan Gaya Aksial TekanYohana KurniawanBelum ada peringkat