Anda mungkin juga menyukai
- Fotogrametri PDFDokumen10 halamanFotogrametri PDFTaruna Rizki AnandaBelum ada peringkat
- Fotogrametri PDFDokumen10 halamanFotogrametri PDFVikanisaBelum ada peringkat
- 3D MODEL BENTENGDokumen13 halaman3D MODEL BENTENGCHELYN YESSI SARAH BR SIAHAANBelum ada peringkat
- SURVEI BAWAH TANAHDokumen4 halamanSURVEI BAWAH TANAHRizkullah Nurfauzi Al AminBelum ada peringkat
- Laporan Praktikum Kalibrasi Kamera Android Cross A7S Menggunakan Software Photomodeler ScannerDokumen18 halamanLaporan Praktikum Kalibrasi Kamera Android Cross A7S Menggunakan Software Photomodeler ScannerSarkawi Jaya Harahap100% (1)
- Pembuatan Model 3D Bangunan Gedung Dengan Memanfaatkan Data Foto Udara (Studi Kasus: Kampus II Institut Teknologi Nasional Malang)Dokumen18 halamanPembuatan Model 3D Bangunan Gedung Dengan Memanfaatkan Data Foto Udara (Studi Kasus: Kampus II Institut Teknologi Nasional Malang)Halo HaiBelum ada peringkat
- 3D Modelling Obyek Kerapatan Tinggi Menggunakan Metode Fotogrametri Jarak DekatDokumen7 halaman3D Modelling Obyek Kerapatan Tinggi Menggunakan Metode Fotogrametri Jarak DekatArmand AminBelum ada peringkat
- D-2 Pembuatan Model Tiga DimensiDokumen6 halamanD-2 Pembuatan Model Tiga DimensiangrainadillaBelum ada peringkat
- Resume JurnalDokumen4 halamanResume JurnalJuan AndrianBelum ada peringkat
- Laporan Photo TriangulationDokumen17 halamanLaporan Photo TriangulationMei FirdaniBelum ada peringkat
- Pembuatan Model 3D Bangunan LOD 3 Dengan Pemanfaatan Foto Udara UavDokumen5 halamanPembuatan Model 3D Bangunan LOD 3 Dengan Pemanfaatan Foto Udara UavryanBelum ada peringkat
- Review Jurnal Veri Hasangapon 4122318130012Dokumen6 halamanReview Jurnal Veri Hasangapon 4122318130012veri hsBelum ada peringkat
- Analisa Bentuk Geometri 3d Tangki UntukDokumen11 halamanAnalisa Bentuk Geometri 3d Tangki UntukRomi FadlyBelum ada peringkat
- FotogrametriDokumen20 halamanFotogrametritirto babbaBelum ada peringkat
- Analisis Akurasi Pemodelan 3DDokumen11 halamanAnalisis Akurasi Pemodelan 3DDasita Meygan PratiwiBelum ada peringkat
- Zakky Nurshidiq - Tugas 8Dokumen31 halamanZakky Nurshidiq - Tugas 8ZAKKY NURSHIDIQBelum ada peringkat
- G041221090-DESTA CITRA SAPUTRI-Tugas 2 DASKLIMDokumen8 halamanG041221090-DESTA CITRA SAPUTRI-Tugas 2 DASKLIMRian VanBelum ada peringkat
- M10 - SPSA - Leonard Eka Satya Nugraha - 481383Dokumen15 halamanM10 - SPSA - Leonard Eka Satya Nugraha - 481383Leonard Eka Satya NugrahaBelum ada peringkat
- Jurnal Kelompok 4 Fotogrametri 1Dokumen12 halamanJurnal Kelompok 4 Fotogrametri 1Alpin PratamaBelum ada peringkat
- B 4 4 PDFDokumen37 halamanB 4 4 PDFDiyanBelum ada peringkat
- 1 SMDokumen10 halaman1 SMHafid SyabanaBelum ada peringkat
- Analisa Bentuk Geometri 3D Tangki UntukDokumen9 halamanAnalisa Bentuk Geometri 3D Tangki UntukMuhammad Rizqi RosyadiBelum ada peringkat
- SFAP MENGGUNAKAN PESAWAT MODELDokumen17 halamanSFAP MENGGUNAKAN PESAWAT MODELannisa ersa azzahraBelum ada peringkat
- Fotogrametri PetrusDokumen14 halamanFotogrametri PetrusSatriaBayuAjiBelum ada peringkat
- Tugas Jurnal FotriDokumen5 halamanTugas Jurnal FotriDilla PutriBelum ada peringkat
- ICRS ITRF Dan Datum GeodetikDokumen9 halamanICRS ITRF Dan Datum GeodetikRizkyGinanjarBelum ada peringkat
- JURNALDokumen9 halamanJURNALFabil AlbarruBelum ada peringkat
- Rizkulloh Nurfauzi Al Amin - KALIBRASI KAMERADokumen8 halamanRizkulloh Nurfauzi Al Amin - KALIBRASI KAMERARizkullah Nurfauzi Al AminBelum ada peringkat
- 3D Modelling Bangunan Menggunakan Image ModellerDokumen18 halaman3D Modelling Bangunan Menggunakan Image ModelleragusBelum ada peringkat
- Jurnal PDFDokumen17 halamanJurnal PDFalvinny100% (2)
- 1 SMDokumen12 halaman1 SMidris darmawanBelum ada peringkat
- S. Hendriatiningsih DKK Vol.21 No.2 Hal 163 167Dokumen8 halamanS. Hendriatiningsih DKK Vol.21 No.2 Hal 163 167Iqbal SaefulBelum ada peringkat
- FotogrametriDokumen13 halamanFotogrametriAstrid FadhilahBelum ada peringkat
- Peg0078 3 134233Dokumen7 halamanPeg0078 3 134233Afdhal GansBelum ada peringkat
- S2 - Uas - Integrasi Sensor - Muhammad Ulin Nuha - 2018 PDFDokumen20 halamanS2 - Uas - Integrasi Sensor - Muhammad Ulin Nuha - 2018 PDFMuhammad Ulin NuhaBelum ada peringkat
- A1 Survey GCPDokumen10 halamanA1 Survey GCPOrisa IntanBelum ada peringkat
- 03 - 019 - Zakky Nurshidiq - Tree CountingDokumen29 halaman03 - 019 - Zakky Nurshidiq - Tree CountingZakky NurshidiqBelum ada peringkat
- FOTO3DDokumen6 halamanFOTO3DWahyu Soleh SetiajiBelum ada peringkat
- Jurnal Fotri English VerDokumen2 halamanJurnal Fotri English VerDilla PutriBelum ada peringkat
- Terrestrial Laser ScannerDokumen3 halamanTerrestrial Laser ScannerarsywulanBelum ada peringkat
- Januar R - 4122319130004 - Tugas 1 Fotogrametri IIDokumen5 halamanJanuar R - 4122319130004 - Tugas 1 Fotogrametri IIJanuarBelum ada peringkat
- PEMODELAN 3D JEMBATANDokumen3 halamanPEMODELAN 3D JEMBATANBernardus Rafa GustiantoBelum ada peringkat
- Modul Pertemuan 2Dokumen19 halamanModul Pertemuan 2Muhammad Daffa GhalyputraBelum ada peringkat
- FOTOGRAMETRI 3DDokumen2 halamanFOTOGRAMETRI 3DPersha Azizan HakimaBelum ada peringkat
- Fotogrametri InderajaDokumen15 halamanFotogrametri InderajaDimas Panji Budi PrasetyoBelum ada peringkat
- Laporan Praktikum Survei Rekayasa: Pengolahan Data TLSDokumen21 halamanLaporan Praktikum Survei Rekayasa: Pengolahan Data TLSRouf IndhraBelum ada peringkat
- Fotogrametri DigitalDokumen12 halamanFotogrametri DigitalDarma SetiawanBelum ada peringkat
- 3D VISUALISASI TUGU PAHLAWANDokumen6 halaman3D VISUALISASI TUGU PAHLAWANmufidBelum ada peringkat
- 3D Model CandiDokumen14 halaman3D Model Candinazifa_noBelum ada peringkat
- 2 PBDokumen11 halaman2 PBYudi PraztowoBelum ada peringkat
- Jurnal Geodesi Undip: April 2015Dokumen12 halamanJurnal Geodesi Undip: April 2015salsabilaBelum ada peringkat
- 3D DOKUMENTASI CAGARDokumen13 halaman3D DOKUMENTASI CAGARANDHANA PRATISTHA N NBelum ada peringkat
- Adoc - Pub - Bab 1 Pengenalan 11 PendahuluanDokumen11 halamanAdoc - Pub - Bab 1 Pengenalan 11 PendahuluanMuhriz MazaniBelum ada peringkat
- 3D ModellingDokumen24 halaman3D ModellingSarkawi Jaya HarahapBelum ada peringkat
- Materi Pelatihan Drone 3D MappingDokumen61 halamanMateri Pelatihan Drone 3D MappingRendi ArBelum ada peringkat
- 1 PB PDFDokumen17 halaman1 PB PDFKemal Faizal HermawanBelum ada peringkat
- 5) Bab IiDokumen12 halaman5) Bab IiAnang PangestuBelum ada peringkat
- Analisis SpasialDokumen12 halamanAnalisis SpasialAnang PangestuBelum ada peringkat
- Business Plan KWU Team 1Dokumen12 halamanBusiness Plan KWU Team 1Anang PangestuBelum ada peringkat
- Bab Ii - 3Dokumen26 halamanBab Ii - 3Anang PangestuBelum ada peringkat
- ANALISIS KARAKTERISTIKDokumen17 halamanANALISIS KARAKTERISTIKAnang PangestuBelum ada peringkat
- Kwu 04 Legalitas Dan EtikaDokumen20 halamanKwu 04 Legalitas Dan EtikaAnang PangestuBelum ada peringkat
- KEWIRAUSAHAAN - 2022 - Pakta IntegritasDokumen13 halamanKEWIRAUSAHAAN - 2022 - Pakta IntegritasAnang PangestuBelum ada peringkat
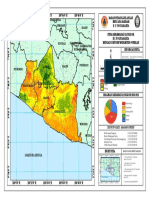
- Peta Kerawanan Longsor DIYDokumen16 halamanPeta Kerawanan Longsor DIYAnang PangestuBelum ada peringkat
- Gaya Lorentz Fisika DasarDokumen12 halamanGaya Lorentz Fisika DasarAnang PangestuBelum ada peringkat
- FOTOGRAMETRIDokumen15 halamanFOTOGRAMETRIAgus Satya MahardikaBelum ada peringkat
- 2.7-2.9 PotLisDokumen6 halaman2.7-2.9 PotLisAnang PangestuBelum ada peringkat
- Jbptitbpp GDL Yonanismai 34410 3 2009ta 2Dokumen26 halamanJbptitbpp GDL Yonanismai 34410 3 2009ta 2Egi Nugraha Al-jawi Al-bantaniBelum ada peringkat
- DJI Phantom 4 ProDokumen12 halamanDJI Phantom 4 ProAnang PangestuBelum ada peringkat
- 2.1 Fotogrametri Jarak DekatDokumen2 halaman2.1 Fotogrametri Jarak DekatAnang PangestuBelum ada peringkat
- Teori Deteksi Blunder Dan Perambatan KesalahanDokumen9 halamanTeori Deteksi Blunder Dan Perambatan KesalahanAnang PangestuBelum ada peringkat
- Longsor KabupatenDokumen1 halamanLongsor KabupatenAnang PangestuBelum ada peringkat
- VEKTOR DISKUSIDokumen18 halamanVEKTOR DISKUSIAnang PangestuBelum ada peringkat
- Teori Perambatan Kesalahan Sistematik Dan AcakDokumen21 halamanTeori Perambatan Kesalahan Sistematik Dan AcakAnang PangestuBelum ada peringkat
- Kelompok 14 - Aplikasi Induksi Elektromagnetik - A - Tugas 4 Kelompok Fisika 3Dokumen10 halamanKelompok 14 - Aplikasi Induksi Elektromagnetik - A - Tugas 4 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- Induksi ElektromagnetikDokumen10 halamanInduksi ElektromagnetikShaumi Arif Al Faizin75% (4)
- Makalah Induksi ElektromagnetikDokumen28 halamanMakalah Induksi ElektromagnetikAri Ryantini New75% (8)
- Induksi ElektromagnetikDokumen10 halamanInduksi ElektromagnetikAnang PangestuBelum ada peringkat
- Haifa Shabirah 21110120130062 Fisdas IIIDokumen10 halamanHaifa Shabirah 21110120130062 Fisdas IIIAnang PangestuBelum ada peringkat
- Medan MagnetDokumen15 halamanMedan MagnetAnang PangestuBelum ada peringkat
- MEDAN MAGNETDokumen29 halamanMEDAN MAGNETAnang PangestuBelum ada peringkat
- Kelompok 18 - Aplikasi Gaya Dan Medan Magnet - A - Tugas 2 Kelompok Fisika 3Dokumen10 halamanKelompok 18 - Aplikasi Gaya Dan Medan Magnet - A - Tugas 2 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- Induksi ElektromagnetikDokumen10 halamanInduksi ElektromagnetikShaumi Arif Al Faizin75% (4)
- IV.2 Jadwal KegiatanDokumen1 halamanIV.2 Jadwal KegiatanAnang PangestuBelum ada peringkat
- III.4.4, III.5.1-5.2 Uji Jarak-Ukur WP-Ukur TheodolitDokumen3 halamanIII.4.4, III.5.1-5.2 Uji Jarak-Ukur WP-Ukur TheodolitAnang PangestuBelum ada peringkat