Anda mungkin juga menyukai
- Tugas 4 Makalah Kerangka Kontrol HorizontalDokumen16 halamanTugas 4 Makalah Kerangka Kontrol HorizontalSelmiana100% (1)
- Deteksi Blunder Perambatan Galat Sistematik Dan AcakDokumen16 halamanDeteksi Blunder Perambatan Galat Sistematik Dan AcakMuh Arif SuhattantoBelum ada peringkat
- Perpanjangan Tali BusurDokumen39 halamanPerpanjangan Tali BusurRizqi Umi Rahmawati100% (1)
- Tide Prediction ArgumentsDokumen4 halamanTide Prediction ArgumentsGery Rahmat RunandiBelum ada peringkat
- Acara 4 - Laporan Jarak Optis Dan Beda Tinggi Menggunakan Theodolit - Kelompok 8 - Kelas eDokumen15 halamanAcara 4 - Laporan Jarak Optis Dan Beda Tinggi Menggunakan Theodolit - Kelompok 8 - Kelas ehartatiananda sBelum ada peringkat
- Diktat Perataan Komplit 2017Dokumen180 halamanDiktat Perataan Komplit 2017Teguh Arya WibawaBelum ada peringkat
- Teori Deteksi Blunder Dan Perambatan KesalahanDokumen9 halamanTeori Deteksi Blunder Dan Perambatan KesalahanAnang PangestuBelum ada peringkat
- Hitung Perataan Terapan Minggu 8: Dr. Ir. Dwi Lestari, S.T, M.E, IPMDokumen26 halamanHitung Perataan Terapan Minggu 8: Dr. Ir. Dwi Lestari, S.T, M.E, IPMTeguh Arya WibawaBelum ada peringkat
- Laporan 3 Iut-1Dokumen12 halamanLaporan 3 Iut-1Ditha Ary Sanjaya100% (1)
- Laporan Praktikum Survei Terestris DasarDokumen3 halamanLaporan Praktikum Survei Terestris DasarDede Tyo JunaikaBelum ada peringkat
- Titik Dasar TeknikDokumen6 halamanTitik Dasar TeknikIsna MutiaBelum ada peringkat
- Bab Vii Pengikatan Kemuka Dan KebelakangDokumen16 halamanBab Vii Pengikatan Kemuka Dan KebelakangDavid Santo A100% (1)
- Tugas 1 Jenis Matriks Rotasi Yang Digunakan Dalam Fotogrametri-1 Punya YuniDokumen20 halamanTugas 1 Jenis Matriks Rotasi Yang Digunakan Dalam Fotogrametri-1 Punya YuniVikanisaBelum ada peringkat
- Geodesi GeometrikDokumen68 halamanGeodesi Geometrikraga dewwandanu putra utoyo0% (1)
- Modul Hitung Perataan KesalahanDokumen109 halamanModul Hitung Perataan KesalahanKantah Balut100% (4)
- Artikel TachymetriDokumen14 halamanArtikel TachymetriLuthfiBelum ada peringkat
- Laporan Praktikum Jalur Terbang Nuryani.BDokumen11 halamanLaporan Praktikum Jalur Terbang Nuryani.BANUR YANI.B 41Belum ada peringkat
- Proyeksi PolyederDokumen14 halamanProyeksi PolyederghifarisyahfriBelum ada peringkat
- Laporan Kerangka Dasar Vertikal Oke!!Dokumen29 halamanLaporan Kerangka Dasar Vertikal Oke!!Muhammad Fajar FadlurahmanBelum ada peringkat
- Uas AditDokumen2 halamanUas AditFarhatun MufrodahBelum ada peringkat
- Pengukuran SudutDokumen2 halamanPengukuran SudutRahil FajriaBelum ada peringkat
- Praktikum Tinggi Bangunan Kelompok 4Dokumen28 halamanPraktikum Tinggi Bangunan Kelompok 4Ghinaa ZalsabillaBelum ada peringkat
- Laporan Praktikum Penajaman Citra - MuzdalifahDokumen16 halamanLaporan Praktikum Penajaman Citra - Muzdalifahnicho kharolliezBelum ada peringkat
- Perambatan KesalahanDokumen5 halamanPerambatan KesalahanArdana Denta Dyaksa100% (3)
- Laprak PDB 2 20DI7231Dokumen4 halamanLaprak PDB 2 20DI7231Niken CandraBelum ada peringkat
- Pengukuran Jarak Tidak LangsungDokumen8 halamanPengukuran Jarak Tidak LangsungZayyed Hassanal ChidrBelum ada peringkat
- B 20DI7017 Khafsah Fathul Jannah Acara 2 FotriDokumen17 halamanB 20DI7017 Khafsah Fathul Jannah Acara 2 Fotrimmonica rissBelum ada peringkat
- Besaran Dasar GaussDokumen12 halamanBesaran Dasar GaussAswar Syafnur100% (1)
- Bahan Ajar Dasar Statistik Perambatan Kesalahan SistematisDokumen6 halamanBahan Ajar Dasar Statistik Perambatan Kesalahan SistematisKhairul FajriBelum ada peringkat
- Srgi 2013Dokumen12 halamanSrgi 2013NadyaBelum ada peringkat
- Modul 1 - Survey Dan Informasi Spasial - Novika Candra F.Dokumen13 halamanModul 1 - Survey Dan Informasi Spasial - Novika Candra F.iqbalBelum ada peringkat
- Laporan Metrik FotogrametriDokumen39 halamanLaporan Metrik FotogrametriVikky Ardhianto100% (6)
- DGN 95 Dan SRGIDokumen7 halamanDGN 95 Dan SRGIKezia SharonBelum ada peringkat
- 01-Pembuatan Lajur PemerumanDokumen16 halaman01-Pembuatan Lajur PemerumanRama fanisa AnderianiBelum ada peringkat
- LAPORANDokumen20 halamanLAPORANKevin Imam AkbarBelum ada peringkat
- Komponen Penting Dalam Survei HidrografiDokumen18 halamanKomponen Penting Dalam Survei HidrografiJoseGonzalezRomeroBelum ada peringkat
- PPV Double StandDokumen8 halamanPPV Double StandMuhammad SidikBelum ada peringkat
- Laporan Akhir Sebelum UtsDokumen24 halamanLaporan Akhir Sebelum UtsAmat SollehBelum ada peringkat
- Laporan Pengukuran Poligon Terbuka Terikat SempurnaDokumen10 halamanLaporan Pengukuran Poligon Terbuka Terikat SempurnaSandra SaputraBelum ada peringkat
- Laporan Praktikum SIG 4Dokumen32 halamanLaporan Praktikum SIG 4Muhammad Agung Andika OktafiansyahBelum ada peringkat
- Transformasi Datum Dan KoordinatDokumen19 halamanTransformasi Datum Dan KoordinatAsadillah HafidBelum ada peringkat
- Laporan Praktikum Survey Terestris Ii 9B Fix Print PDFDokumen57 halamanLaporan Praktikum Survey Terestris Ii 9B Fix Print PDFMahrus AliBelum ada peringkat
- Short Baseline Acoustic PositioningDokumen3 halamanShort Baseline Acoustic PositioningDandy AdityaBelum ada peringkat
- Dasar Teori 3Dokumen2 halamanDasar Teori 3pud2minBelum ada peringkat
- 13 - A - Tugas Pemodelan GeoidDokumen42 halaman13 - A - Tugas Pemodelan GeoidFarhan Aji Kumara100% (1)
- Metode Pengukuran Collins Dan CassiniDokumen3 halamanMetode Pengukuran Collins Dan Cassinifry voni stekyBelum ada peringkat
- Bab 7-Pengukuran JarakDokumen12 halamanBab 7-Pengukuran JarakRachmat Guntur Dwi Putra83% (6)
- Transformasi Koordinat 2D-HelmertDokumen10 halamanTransformasi Koordinat 2D-HelmertRay BlueBelum ada peringkat
- LINIERISASI Pers KolinierDokumen14 halamanLINIERISASI Pers KolinierLarasaty AyuBelum ada peringkat
- Laporan Pengukuran Sipat Datar KDV Kelompok 3Dokumen41 halamanLaporan Pengukuran Sipat Datar KDV Kelompok 3Ghiffary Muhammad RamadanBelum ada peringkat
- 3 Geometri Dalam Ruang, VektorDokumen44 halaman3 Geometri Dalam Ruang, VektorFakhriy Dzukran MandalaBelum ada peringkat
- Fungsi LinierDokumen15 halamanFungsi LiniervikrialhadiBelum ada peringkat
- Fungsi Linear Dan Fungsi KuadratDokumen14 halamanFungsi Linear Dan Fungsi KuadratFahri Fatturahman100% (1)
- 04 PD Eksak - Pengantar Matematika Teknik KimiaDokumen19 halaman04 PD Eksak - Pengantar Matematika Teknik KimiaSetiya EkoBelum ada peringkat
- Fungsi LinierDokumen14 halamanFungsi LinierRamaBelum ada peringkat
- Tugas Problems 11.6 Kelompok 5 Kelas A Pemodelan MatematikaDokumen6 halamanTugas Problems 11.6 Kelompok 5 Kelas A Pemodelan MatematikaIsma Hasanati PutriBelum ada peringkat
- UAS MATFIS II GANJIL 2021 2022 v2Dokumen3 halamanUAS MATFIS II GANJIL 2021 2022 v2Sulaiman NurhidayatBelum ada peringkat
- Metode Integrasi GrafisDokumen5 halamanMetode Integrasi Grafisi love societyBelum ada peringkat
- Hubungan Kofisien Korelasi Dengan Mean Bersyarat Yang LinierDokumen7 halamanHubungan Kofisien Korelasi Dengan Mean Bersyarat Yang LinierAllonk LynaBelum ada peringkat
- PDB Terpisahkan Dan HomogenDokumen11 halamanPDB Terpisahkan Dan HomogenFitri WahyuniBelum ada peringkat
- 5) Bab IiDokumen12 halaman5) Bab IiAnang PangestuBelum ada peringkat
- Kwu 04 Legalitas Dan EtikaDokumen20 halamanKwu 04 Legalitas Dan EtikaAnang PangestuBelum ada peringkat
- Analisis SpasialDokumen12 halamanAnalisis SpasialAnang PangestuBelum ada peringkat
- Bab Ii - 3Dokumen26 halamanBab Ii - 3Anang PangestuBelum ada peringkat
- 53105956Dokumen17 halaman53105956Anang PangestuBelum ada peringkat
- KEWIRAUSAHAAN - 2022 - Pakta IntegritasDokumen13 halamanKEWIRAUSAHAAN - 2022 - Pakta IntegritasAnang PangestuBelum ada peringkat
- Business Plan KWU Team 1Dokumen12 halamanBusiness Plan KWU Team 1Anang PangestuBelum ada peringkat
- 3698 11057 1 SMDokumen7 halaman3698 11057 1 SMAnang PangestuBelum ada peringkat
- DJI Phantom 4 ProDokumen12 halamanDJI Phantom 4 ProAnang PangestuBelum ada peringkat
- 2.1 Fotogrametri Jarak DekatDokumen2 halaman2.1 Fotogrametri Jarak DekatAnang PangestuBelum ada peringkat
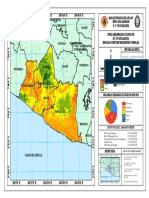
- Longsor KabupatenDokumen1 halamanLongsor KabupatenAnang PangestuBelum ada peringkat
- Foto UdaraDokumen15 halamanFoto UdaraAgus Satya MahardikaBelum ada peringkat
- Presentasi Akhir Magang BPBDDokumen16 halamanPresentasi Akhir Magang BPBDAnang PangestuBelum ada peringkat
- Jbptitbpp GDL Yonanismai 34410 3 2009ta 2Dokumen26 halamanJbptitbpp GDL Yonanismai 34410 3 2009ta 2Egi Nugraha Al-jawi Al-bantaniBelum ada peringkat
- Gaya LorentzDokumen12 halamanGaya LorentzAnang PangestuBelum ada peringkat
- Makalah Induksi ElektromagnetikDokumen10 halamanMakalah Induksi ElektromagnetikShaumi Arif Al Faizin75% (4)
- Makalah Induksi ElektromagnetikDokumen10 halamanMakalah Induksi ElektromagnetikShaumi Arif Al Faizin75% (4)
- Makalah Induksi ElektromagnetikDokumen28 halamanMakalah Induksi ElektromagnetikAri Ryantini New75% (8)
- 2.7-2.9 PotLisDokumen6 halaman2.7-2.9 PotLisAnang PangestuBelum ada peringkat
- Teori Deteksi Blunder Dan Perambatan KesalahanDokumen9 halamanTeori Deteksi Blunder Dan Perambatan KesalahanAnang PangestuBelum ada peringkat
- Kelompok 8A - Matriks Dan VektorDokumen18 halamanKelompok 8A - Matriks Dan VektorAnang PangestuBelum ada peringkat
- Kelompok 14 - Aplikasi Induksi Elektromagnetik - A - Tugas 4 Kelompok Fisika 3Dokumen10 halamanKelompok 14 - Aplikasi Induksi Elektromagnetik - A - Tugas 4 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- Kelompok 14 - Sumber Medan Magnet - A - Tugas 3 Kelompok Fisika 3Dokumen15 halamanKelompok 14 - Sumber Medan Magnet - A - Tugas 3 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- Kelompok 14 - Aplikasi Induksi Elektromagnetik - A - Tugas 4 Kelompok Fisika 3Dokumen10 halamanKelompok 14 - Aplikasi Induksi Elektromagnetik - A - Tugas 4 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- Haifa Shabirah 21110120130062 Fisdas IIIDokumen10 halamanHaifa Shabirah 21110120130062 Fisdas IIIAnang PangestuBelum ada peringkat
- Kelompok 15 - Sumber Medan Magnet - A - Tugas 3 Kelompok Fisika 3Dokumen29 halamanKelompok 15 - Sumber Medan Magnet - A - Tugas 3 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- IV.2 Jadwal KegiatanDokumen1 halamanIV.2 Jadwal KegiatanAnang PangestuBelum ada peringkat
- Kelompok 18 - Aplikasi Gaya Dan Medan Magnet - A - Tugas 2 Kelompok Fisika 3Dokumen10 halamanKelompok 18 - Aplikasi Gaya Dan Medan Magnet - A - Tugas 2 Kelompok Fisika 3Anang PangestuBelum ada peringkat
- III.4.4, III.5.1-5.2 Uji Jarak-Ukur WP-Ukur TheodolitDokumen3 halamanIII.4.4, III.5.1-5.2 Uji Jarak-Ukur WP-Ukur TheodolitAnang PangestuBelum ada peringkat