Anda mungkin juga menyukai
- Naskah Akademik Pendirian Badan Pengatur Jalan TolDari EverandNaskah Akademik Pendirian Badan Pengatur Jalan TolPenilaian: 3.5 dari 5 bintang3.5/5 (8)
- MEMAHAMI KERJA ENGINEDokumen31 halamanMEMAHAMI KERJA ENGINEIswandi IsmailBelum ada peringkat
- TEORI PNEUMATIK DAN ELEKTROPNEUMATIKDokumen29 halamanTEORI PNEUMATIK DAN ELEKTROPNEUMATIKMuhammad Yoga Wibawa Saputra100% (1)
- Katup IndustriDokumen15 halamanKatup IndustriWahyu FarhanBelum ada peringkat
- OVERHAUL ENGINEDokumen11 halamanOVERHAUL ENGINEdwiBelum ada peringkat
- Bab 4Dokumen9 halamanBab 4Bahari Prabowo AjiBelum ada peringkat
- Soal HidrolikDokumen88 halamanSoal HidrolikYuvita Andriana50% (4)
- Critical Book Report: Disusun OlehDokumen28 halamanCritical Book Report: Disusun OlehRizkyBelum ada peringkat
- P&IDDokumen26 halamanP&IDriskasahidingBelum ada peringkat
- Makalah Kelompok 11Dokumen13 halamanMakalah Kelompok 11Jhosep SiagianBelum ada peringkat
- LAPORAN PRAKTIKUM POMPA SERI-PARALEL - de Suta - 191331032Dokumen14 halamanLAPORAN PRAKTIKUM POMPA SERI-PARALEL - de Suta - 191331032suta ajiBelum ada peringkat
- Modul Tugas KhususDokumen24 halamanModul Tugas KhususOlo Chris Simada Pandia 1707114094Belum ada peringkat
- Kertas Kerja ETN303 HydraulicsDokumen11 halamanKertas Kerja ETN303 HydraulicsFairos ZakariahBelum ada peringkat
- Laporan Praktikum Modul 3 FDM ALEM SAVERO 223030060Dokumen20 halamanLaporan Praktikum Modul 3 FDM ALEM SAVERO 223030060Rizki TonoBelum ada peringkat
- Percobaan Injector Dan EjectorDokumen13 halamanPercobaan Injector Dan EjectorAgnesBelum ada peringkat
- Kelompok 3 Pengembangan Rangkaian Aktuator Tunggal PneumatikDokumen31 halamanKelompok 3 Pengembangan Rangkaian Aktuator Tunggal Pneumatikmangasi sinagaBelum ada peringkat
- Uprak FisikaDokumen12 halamanUprak FisikaIhyaUlumuddinBelum ada peringkat
- OPTIMASI BLOWER DAN CEROBONGDokumen11 halamanOPTIMASI BLOWER DAN CEROBONGM. Agris Muqtavin , S.T.Belum ada peringkat
- PID Dan Control ValveDokumen57 halamanPID Dan Control ValveMuhammadAkbarBelum ada peringkat
- Makalah Ac MobilDokumen37 halamanMakalah Ac MobilValkrye Prastya100% (1)
- Makalah HidrolikaDokumen28 halamanMakalah Hidrolikaarjono gultomBelum ada peringkat
- Sistem AcDokumen10 halamanSistem AcDian AnjasmaraBelum ada peringkat
- Perancangan STHE - ChemcadDokumen29 halamanPerancangan STHE - ChemcadpancokomBelum ada peringkat
- Kel 5. Makalah Kompresor RadialDokumen12 halamanKel 5. Makalah Kompresor RadialAdinda Putri MahardhikaBelum ada peringkat
- Kelompok 2 - Pengembangan Sirkuit Diagram Dan Pendekatan Sistem Pneumatic Dan HydrolicDokumen11 halamanKelompok 2 - Pengembangan Sirkuit Diagram Dan Pendekatan Sistem Pneumatic Dan HydrolicJhosep SiagianBelum ada peringkat
- Laprak Pompa Seri-ParalelDokumen21 halamanLaprak Pompa Seri-Paralelkurang banyakBelum ada peringkat
- Laporan Gear PumpDokumen22 halamanLaporan Gear PumpAnakPulau OfficialBelum ada peringkat
- Volve MekfluidDokumen10 halamanVolve MekfluidmeitaBelum ada peringkat
- AIK (Makalah Distilasi)Dokumen10 halamanAIK (Makalah Distilasi)Citra Kusuma ParahitaBelum ada peringkat
- Makalah Engine Timing Valve Diagram Dan PV DiagramDokumen15 halamanMakalah Engine Timing Valve Diagram Dan PV DiagramReza CandraBelum ada peringkat
- Makalah Pengembangan Rangkaian Aktuator Tunggal PneumatikDokumen14 halamanMakalah Pengembangan Rangkaian Aktuator Tunggal PneumatikTV SHOWBelum ada peringkat
- ALF PRAKTIKUMDokumen21 halamanALF PRAKTIKUMDarren KurniaBelum ada peringkat
- Kelompok 4 Hidrolik Dan PneumatikDokumen19 halamanKelompok 4 Hidrolik Dan PneumatikJhosep SiagianBelum ada peringkat
- Transportasi Fluida GasDokumen8 halamanTransportasi Fluida GasretnoBelum ada peringkat
- SISTEM MESIN FLUIDADokumen20 halamanSISTEM MESIN FLUIDAArdhi Badriyan PratamaBelum ada peringkat
- Laporan Fluida FaustraDokumen37 halamanLaporan Fluida Faustrariski saputraBelum ada peringkat
- A133 Mendimensi Diameter Pipa AirDokumen39 halamanA133 Mendimensi Diameter Pipa Airchepimanca100% (2)
- SF Kelompok 11hans Atil PanduDokumen33 halamanSF Kelompok 11hans Atil PanduEvan Fadhil NurhakimBelum ada peringkat
- Makalah HidrolikaDokumen27 halamanMakalah Hidrolikajerico sihombing100% (1)
- SISTEM ACDokumen46 halamanSISTEM ACAhmad JajleBelum ada peringkat
- Aliran FluidaDokumen37 halamanAliran Fluidaagus sumantri67% (6)
- Pneumatik Dan HidrolikDokumen13 halamanPneumatik Dan Hidroliksardion siregarBelum ada peringkat
- Laporan Pompa & Kompresor FixDokumen18 halamanLaporan Pompa & Kompresor FixAhmad ikbalBelum ada peringkat
- LAPORAN FRAKTIKUM FLUIDA SYAFI'UDIN 1421800201 FixDokumen45 halamanLAPORAN FRAKTIKUM FLUIDA SYAFI'UDIN 1421800201 FixSyafi UdinBelum ada peringkat
- PENGUJIAN AC BENCHDokumen74 halamanPENGUJIAN AC BENCHMuhammad Zain NawwarBelum ada peringkat
- Pengenalan Kepada Sistem HidraulikDokumen21 halamanPengenalan Kepada Sistem HidraulikAnonymous zzQORPqSe33% (6)
- KompresorDokumen16 halamanKompresorDesya NadillaBelum ada peringkat
- Makalah Orifice GabunganDokumen29 halamanMakalah Orifice GabungantriigustinaBelum ada peringkat
- TEKNIK GAS BUMIDokumen34 halamanTEKNIK GAS BUMIRita Susanti100% (1)
- Nota HidraulikDokumen12 halamanNota HidraulikNoorlida KMBelum ada peringkat
- SISTEM HIDROLIKDokumen83 halamanSISTEM HIDROLIKdolensiallaganBelum ada peringkat
- Kinerja KompresorDokumen15 halamanKinerja KompresorBaguz X-panser BonyBelum ada peringkat
- PANDUAN Praktek SM V 2023 TerpaduDokumen78 halamanPANDUAN Praktek SM V 2023 TerpaduRAHMAD AFIZBelum ada peringkat
- W132100038 - Alat Penukar Kalor: Dasar Metode Termal DesainDokumen13 halamanW132100038 - Alat Penukar Kalor: Dasar Metode Termal DesainDoni DonyBelum ada peringkat
- Sistem SuplaiDokumen24 halamanSistem SuplaiLAUNDRY RSUD TANAH ABANGBelum ada peringkat
- Pompa Sentrifugal DediDokumen20 halamanPompa Sentrifugal DediDedi Hamonangan SitanggangBelum ada peringkat
- Laporan Akhir Praktikum Total Head.Dokumen13 halamanLaporan Akhir Praktikum Total Head.alvandorezim145Belum ada peringkat
- OPTIMALKAN PEMANFAATAN SUMBER BELAJARDokumen4 halamanOPTIMALKAN PEMANFAATAN SUMBER BELAJARSandro NainggolanBelum ada peringkat
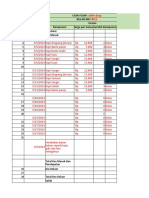
- Cash Flow Kopi Shop Kelompok 4 Bulan 5Dokumen3 halamanCash Flow Kopi Shop Kelompok 4 Bulan 5Sandro NainggolanBelum ada peringkat
- CH 5 George - Dieter, - Linda - Schmidt - Engineering - Design - En.id (Keloompok 3Dokumen64 halamanCH 5 George - Dieter, - Linda - Schmidt - Engineering - Design - En.id (Keloompok 3Sandro NainggolanBelum ada peringkat
- Blower Dan Sistem Kelistrikan AcDokumen5 halamanBlower Dan Sistem Kelistrikan AcSandro NainggolanBelum ada peringkat
- SISTEM AC MOBILDokumen19 halamanSISTEM AC MOBILSandro NainggolanBelum ada peringkat
- Car Diagnosis: Engine Won't Start After 3 TriesDokumen1 halamanCar Diagnosis: Engine Won't Start After 3 TriesSandro NainggolanBelum ada peringkat
- Modul AC MobilDokumen13 halamanModul AC Mobilbolsterpillow100% (2)
- Tugas 2 SeminarDokumen17 halamanTugas 2 SeminarSandro NainggolanBelum ada peringkat
- Car Diagnosis: Engine Won't Start After 3 TriesDokumen1 halamanCar Diagnosis: Engine Won't Start After 3 TriesSandro NainggolanBelum ada peringkat
- ENGINE MANAGEMENT SISTEM MOBIL AVANZADokumen10 halamanENGINE MANAGEMENT SISTEM MOBIL AVANZASandro NainggolanBelum ada peringkat
- Piter Jones Nainggolan - TR 2Dokumen12 halamanPiter Jones Nainggolan - TR 2Sandro NainggolanBelum ada peringkat
- Surat PermohonanDokumen1 halamanSurat PermohonanSandro NainggolanBelum ada peringkat
- Analisis Swot PiterDokumen1 halamanAnalisis Swot PiterSandro NainggolanBelum ada peringkat
- Bab IDokumen14 halamanBab ISandro NainggolanBelum ada peringkat
- Mengungkap RasaDokumen6 halamanMengungkap RasaSandro NainggolanBelum ada peringkat
- Sebuah Catatan Perjalanan BersamamuDokumen23 halamanSebuah Catatan Perjalanan BersamamuSandro NainggolanBelum ada peringkat
- Media TikDokumen13 halamanMedia TikSandro NainggolanBelum ada peringkat
- Presentation 1Dokumen4 halamanPresentation 1Sandro NainggolanBelum ada peringkat
- TEKNOLOGI ALAT BERATDokumen4 halamanTEKNOLOGI ALAT BERATSandro NainggolanBelum ada peringkat
- Mid Metopel 22-2Dokumen1 halamanMid Metopel 22-2Sandro NainggolanBelum ada peringkat
- Instrumen Non Tes Dalam Penelitian PendidikanDokumen22 halamanInstrumen Non Tes Dalam Penelitian PendidikanSandro NainggolanBelum ada peringkat
- Pengertian Flayer Dan Membuat FlayerDokumen5 halamanPengertian Flayer Dan Membuat FlayerSandro NainggolanBelum ada peringkat
- Dibaca YaDokumen3 halamanDibaca YaSandro NainggolanBelum ada peringkat
- UNTUKMUDokumen2 halamanUNTUKMUSandro NainggolanBelum ada peringkat
- Hijau Poster Acara Pelatihan Usaha Poster FlyerDokumen1 halamanHijau Poster Acara Pelatihan Usaha Poster FlyerSandro NainggolanBelum ada peringkat
- Pasar Sasaran Wirausaha Produk Kerajinan Untuk Pasar LokalDokumen9 halamanPasar Sasaran Wirausaha Produk Kerajinan Untuk Pasar LokalSandro NainggolanBelum ada peringkat
- REVISI RPP 1 - Josep Adventus SiagianDokumen3 halamanREVISI RPP 1 - Josep Adventus SiagianSandro NainggolanBelum ada peringkat
- (Novel, Cindy, Alex, Mirakel) : Xii Ipa 1Dokumen7 halaman(Novel, Cindy, Alex, Mirakel) : Xii Ipa 1Sandro NainggolanBelum ada peringkat