Anda mungkin juga menyukai
- Catu Daya SwitchingDokumen6 halamanCatu Daya Switchingdee cute50% (2)
- Pengertian Kontaktor Dan Cara KerjanyaDokumen3 halamanPengertian Kontaktor Dan Cara KerjanyaBagus DarmawanBelum ada peringkat
- Motor DCDokumen18 halamanMotor DCArief Purwanto100% (1)
- Rele DiferensialDokumen11 halamanRele DiferensialamaliakarinaBelum ada peringkat
- PDF Eksitasi Brushless Generator CompressDokumen17 halamanPDF Eksitasi Brushless Generator CompressMuhammad IkhsanBelum ada peringkat
- Eksitasi Brushless GeneratorDokumen17 halamanEksitasi Brushless GeneratorBinanta Tarigan100% (1)
- Cdi - TciDokumen10 halamanCdi - TciIrwan Budi NugrohoBelum ada peringkat
- Aplikasi Elektronika DayaDokumen6 halamanAplikasi Elektronika DayaRizki Pra DanaBelum ada peringkat
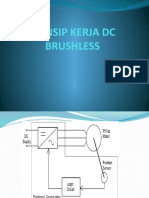
- Prinsip Kerja DC BrushlessDokumen23 halamanPrinsip Kerja DC BrushlessGhozi PratamBelum ada peringkat
- Bab III Sistem Pengapian ElektronikDokumen5 halamanBab III Sistem Pengapian ElektronikTomy AdamBelum ada peringkat
- #3 (Sistem Pengapian Elektronik)Dokumen5 halaman#3 (Sistem Pengapian Elektronik)Tomy AdamBelum ada peringkat
- 01 Adam Ferdyansyah ServomechanismDokumen3 halaman01 Adam Ferdyansyah ServomechanismAdam FerdyansyahBelum ada peringkat
- Laporan ELDA DC-DriveDokumen25 halamanLaporan ELDA DC-DriveChristian Bate'eBelum ada peringkat
- Sistem Pengapian ElektronikDokumen3 halamanSistem Pengapian ElektronikTaufik Fajar IrawanBelum ada peringkat
- Sistem Pengapian ElektronikDokumen5 halamanSistem Pengapian ElektronikNurwanto SujarwoBelum ada peringkat
- Vektor Grup Trafo Dinyatakan Dalam Bilangan JamDokumen32 halamanVektor Grup Trafo Dinyatakan Dalam Bilangan JamNizamMulukBelum ada peringkat
- Arya Winara Tugas1 Teori SisdalDokumen9 halamanArya Winara Tugas1 Teori SisdalArya Winara SaputraBelum ada peringkat
- Software PSIM Membantu Mempermudah Memahami Suatu Rangkaian Terkhusus Rangkaian DayaDokumen9 halamanSoftware PSIM Membantu Mempermudah Memahami Suatu Rangkaian Terkhusus Rangkaian DayaRizki0402Belum ada peringkat
- Peranan Elektronika Daya Pada Transmisi Daya ElektrikDokumen4 halamanPeranan Elektronika Daya Pada Transmisi Daya ElektrikyusrielyahyaBelum ada peringkat
- Pengapian ElektronikDokumen21 halamanPengapian Elektroniktulusndeso100% (1)
- Karakteristik Operasi Motor DC ShuntDokumen2 halamanKarakteristik Operasi Motor DC ShuntJanet Angriani KaliBelum ada peringkat
- Ac Controller Elektronika DayaDokumen6 halamanAc Controller Elektronika DayaAdlia DifriantiBelum ada peringkat
- KomutatorDokumen6 halamanKomutatorBagusaryowibowo WibowoBelum ada peringkat
- Tugas 1Dokumen17 halamanTugas 1Latif KurniaBelum ada peringkat
- Sensor 11 Tachogenerator (Revisi)Dokumen5 halamanSensor 11 Tachogenerator (Revisi)Susyana SripBelum ada peringkat
- Sensor 11 Tachogenerator Revisi - CompressDokumen5 halamanSensor 11 Tachogenerator Revisi - CompressAbar ButonBelum ada peringkat
- Makalah CycloconverterDokumen13 halamanMakalah CycloconverterYoga Tri WarmenBelum ada peringkat
- Current TransformerDokumen3 halamanCurrent TransformerHery LodohBelum ada peringkat
- Essay STLDokumen11 halamanEssay STLIsmail IsmailBelum ada peringkat
- Tugas Widya Apri WandiniDokumen15 halamanTugas Widya Apri WandiniPendi AriantoBelum ada peringkat
- 8.A. Sistem PengisianDokumen48 halaman8.A. Sistem Pengisianciomas tkrBelum ada peringkat
- Pengendalian Kecepatan Motor DC Dengan ChopperDokumen9 halamanPengendalian Kecepatan Motor DC Dengan ChopperRebit BeritBelum ada peringkat
- 6.current TransformerDokumen3 halaman6.current TransformerkartikaBelum ada peringkat
- Landasan Teori: 1. AlternatorDokumen22 halamanLandasan Teori: 1. AlternatorFaizinBelum ada peringkat
- Power Point Mesin-Mesin Elektrik 1Dokumen49 halamanPower Point Mesin-Mesin Elektrik 1MarolopBelum ada peringkat
- Makalah Elektronika DayaDokumen12 halamanMakalah Elektronika DayaAtmosphere-Belum ada peringkat
- Aplikasi Triac-Wps OfficeDokumen4 halamanAplikasi Triac-Wps Officewulan rembulanBelum ada peringkat
- PRT 5 Alternator, Inverter, Dan Kontrol Yang TerkaitDokumen17 halamanPRT 5 Alternator, Inverter, Dan Kontrol Yang TerkaitAlexandro da CunhaBelum ada peringkat
- ThyristorDokumen47 halamanThyristorYaftoran Anes RamosBelum ada peringkat
- LAPORANDokumen22 halamanLAPORANNur Rizki KurniatiBelum ada peringkat
- Materi Elektronika Daya Rangkaian Pemicu Dan KomutasiDokumen9 halamanMateri Elektronika Daya Rangkaian Pemicu Dan KomutasiAjiEdelweisBelum ada peringkat
- TRIACDokumen14 halamanTRIACEko Adhitya WarmanBelum ada peringkat
- Is I 3234736739738Dokumen14 halamanIs I 3234736739738fadliBelum ada peringkat
- Sistem Pengapian ElektronikDokumen8 halamanSistem Pengapian ElektronikSutriono TriBelum ada peringkat
- Sistem PengapianDokumen4 halamanSistem Pengapianlittle star26o7Belum ada peringkat
- Sistem Pengisian 1Dokumen11 halamanSistem Pengisian 1criz toverBelum ada peringkat
- Catu Daya Power SupplyDokumen14 halamanCatu Daya Power SupplyCahaya HatiBelum ada peringkat
- Prinsip Pengontrolan Motor Induksi 3 FasaDokumen43 halamanPrinsip Pengontrolan Motor Induksi 3 FasaGintar Valoversz100% (3)
- Rangkaian OptocouplerDokumen8 halamanRangkaian OptocouplerHaFiz Al HaidiBelum ada peringkat
- Menurut Standar IEEE 1159Dokumen8 halamanMenurut Standar IEEE 1159Andi AnfieBelum ada peringkat
- Bab IV Dan V Motor DCDokumen31 halamanBab IV Dan V Motor DCSangkara NawataBelum ada peringkat
- AC Excited Generator (Doubly Fed Generator) Untuk Pembangkit Listrik Tenaga AnginDokumen15 halamanAC Excited Generator (Doubly Fed Generator) Untuk Pembangkit Listrik Tenaga AnginDhany IrvandyBelum ada peringkat
- Materi 1 Sistem Pengapian ElektronikDokumen8 halamanMateri 1 Sistem Pengapian ElektronikTrubus PagudaBelum ada peringkat
- Modul Mesin-Mesin ListrikDokumen16 halamanModul Mesin-Mesin ListrikFariz AhdiatamaBelum ada peringkat
- Aplikasi Sensor Load Cell Dalam Sistem LiftDokumen3 halamanAplikasi Sensor Load Cell Dalam Sistem Lifthaifa zalikhaBelum ada peringkat
- Makalah Elda Pengendali Tegangan AcDokumen14 halamanMakalah Elda Pengendali Tegangan AcfardianBelum ada peringkat
- Kendali Tegangan ACDokumen10 halamanKendali Tegangan ACMuhammad Iqbal FathurahmanBelum ada peringkat