Anda mungkin juga menyukai
- Rangkaian Motor 3 Fasa Mesin CraneDokumen8 halamanRangkaian Motor 3 Fasa Mesin CraneFajar HeriyantoBelum ada peringkat
- Rangkaian Diagram Garis Star Delta Pada Motor Induksi AC 3 PhasaDokumen153 halamanRangkaian Diagram Garis Star Delta Pada Motor Induksi AC 3 PhasaB Ricardo Tampubolon100% (6)
- Cara Baca Electric Wiring Diagram KomatsuDokumen6 halamanCara Baca Electric Wiring Diagram KomatsuAkhir 999 AkhirBelum ada peringkat
- Rangkaian Diagram Hoist CraneDokumen7 halamanRangkaian Diagram Hoist CraneNey SinagaBelum ada peringkat
- Meluruskan Kekeliruan Pembacaan Name Plate Tegangan Motor Listrik 3 Fasa - Listrik-PraktisDokumen17 halamanMeluruskan Kekeliruan Pembacaan Name Plate Tegangan Motor Listrik 3 Fasa - Listrik-PraktisedotoshiBelum ada peringkat
- Hidrolik (Direct Control Valve & Flow Control Valve)Dokumen14 halamanHidrolik (Direct Control Valve & Flow Control Valve)Harun EfBelum ada peringkat
- Flasher Sepeda Motor Ini Dapat Dibuat Sendiri Dari Komponen Umum Yang Banyak Dijual Di TokoDokumen3 halamanFlasher Sepeda Motor Ini Dapat Dibuat Sendiri Dari Komponen Umum Yang Banyak Dijual Di TokoMaster CoyBelum ada peringkat
- Fungsi Relay 4 KakiDokumen4 halamanFungsi Relay 4 Kakiroger thatBelum ada peringkat
- Evaluasi Sistem Hidrolik Pada Hydraulik-HerkuliDokumen49 halamanEvaluasi Sistem Hidrolik Pada Hydraulik-Herkuliadi utomoBelum ada peringkat
- Tahanan IsolasiDokumen7 halamanTahanan IsolasiIntan Fuzi Astuti0% (1)
- Rangkaian Motor Listrik - FromxzeroDokumen3 halamanRangkaian Motor Listrik - Fromxzerotugi_yonoBelum ada peringkat
- Transmisi OtomatisDokumen8 halamanTransmisi OtomatisFrengky Akmil PutraBelum ada peringkat
- Simbol KelistrikanDokumen7 halamanSimbol KelistrikanRidwan Ibin Yanuardi100% (1)
- KK-12 Pen Go Per Asian Sistem Pengendali ElektromagnetikDokumen86 halamanKK-12 Pen Go Per Asian Sistem Pengendali ElektromagnetikGenk Sue100% (2)
- XI - Meka (Soal PAT Genap)Dokumen6 halamanXI - Meka (Soal PAT Genap)DENI SUSANTOBelum ada peringkat
- Reaksi JangkarDokumen7 halamanReaksi JangkarJust Latif No Other100% (1)
- Motor ListrikDokumen91 halamanMotor ListrikApri ApriyantoBelum ada peringkat
- Makalah FixDokumen14 halamanMakalah FixHerlin SetyawanBelum ada peringkat
- Tambal Ban ElektrikDokumen13 halamanTambal Ban ElektrikYulius Thulet100% (1)
- Pada Umumnya Name Plate Pada Motor Induksi 3 Phasa Terdapat Hal Hal Penting Tentang Klasifikasi Motor Itu SendiriDokumen22 halamanPada Umumnya Name Plate Pada Motor Induksi 3 Phasa Terdapat Hal Hal Penting Tentang Klasifikasi Motor Itu SendiriU OesmanBelum ada peringkat
- Cara Menghitung Ampere Motor 3 Dan 1 Phase Dengan Rumus DayaDokumen10 halamanCara Menghitung Ampere Motor 3 Dan 1 Phase Dengan Rumus DayaHendy AchmadBelum ada peringkat
- Makalah Regulator Pada MobilDokumen14 halamanMakalah Regulator Pada MobilslampackBelum ada peringkat
- Pemeriksaan Pengapian Kijang 5KDokumen2 halamanPemeriksaan Pengapian Kijang 5KAde PangestuBelum ada peringkat
- Sistem Pendingin Pada GT (Generator Transformer) Daya 370 MvaDokumen10 halamanSistem Pendingin Pada GT (Generator Transformer) Daya 370 Mvaaldiyanto SubarkhahBelum ada peringkat
- Pengertian ACBDokumen2 halamanPengertian ACBArdhyekxCmd100% (1)
- Bab IiiDokumen37 halamanBab IiiDennius AritonangBelum ada peringkat
- Hydraulic Minggu 3Dokumen9 halamanHydraulic Minggu 3Yazied AndreazBelum ada peringkat
- Bagian Bagian GeneratorDokumen3 halamanBagian Bagian GeneratorJulian Rizqi Al FawzyBelum ada peringkat
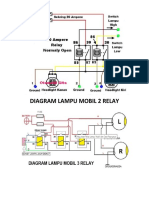
- Diagram Lampu Mobil 2 RelayDokumen3 halamanDiagram Lampu Mobil 2 RelayFirman ArdianBelum ada peringkat
- Buku Ajar Pm.3 Teknik OtomotifDokumen81 halamanBuku Ajar Pm.3 Teknik OtomotifMarinda RamadhinaBelum ada peringkat
- Makalah Instalasi TenagaDokumen33 halamanMakalah Instalasi TenagaRahadi Ramlan100% (1)
- Basic Mekanik - BASIC ELECTRICDokumen27 halamanBasic Mekanik - BASIC ELECTRICguncengBelum ada peringkat
- Wiring Diagram Star DeltaDokumen25 halamanWiring Diagram Star DeltaDanz SaragihBelum ada peringkat
- Proposal Star Delta Motor 3 FasaDokumen9 halamanProposal Star Delta Motor 3 FasaCaesar Abdul AzisBelum ada peringkat
- Pengujian Variasi Tekanan Injektor Dengan Bahan Bakar Solar Dan Pertamina Dex Terhadap Konsumsi Bahan Bakar Dan RPMDokumen40 halamanPengujian Variasi Tekanan Injektor Dengan Bahan Bakar Solar Dan Pertamina Dex Terhadap Konsumsi Bahan Bakar Dan RPMBayu Krisna100% (3)
- Cara Pengoperasian PanelDokumen9 halamanCara Pengoperasian PanelBudi Marelan100% (1)
- MAKALAH Exciter Pada Generator SinkronDokumen5 halamanMAKALAH Exciter Pada Generator SinkronAgus Mahendra Hampir SuksesBelum ada peringkat
- Pengasutan LangsungDokumen8 halamanPengasutan LangsungAirlangga Ananta WikramaBelum ada peringkat
- Basic ElectricDokumen12 halamanBasic Electricbudi_ummBelum ada peringkat
- Studi Literatur Terjadinya Stuck Closed Engine Air Intake Anti Ive Valve Pada Pesawat Airbus A320Dokumen33 halamanStudi Literatur Terjadinya Stuck Closed Engine Air Intake Anti Ive Valve Pada Pesawat Airbus A320Edi SasongkoBelum ada peringkat
- Sistem Starter Mesin Diesel KonvensionalDokumen13 halamanSistem Starter Mesin Diesel KonvensionaldimasBelum ada peringkat
- SolenoidDokumen8 halamanSolenoidArimbi GembiekBelum ada peringkat
- Perbaikan Kompresor Udara Dan Komponen KomponennyaDokumen141 halamanPerbaikan Kompresor Udara Dan Komponen KomponennyaaitarakBelum ada peringkat
- Program PLC Untuk Kontrol Motor Belt ConveyorDokumen3 halamanProgram PLC Untuk Kontrol Motor Belt ConveyorImran St ChaniagoBelum ada peringkat
- Kelistrikan Rev1Dokumen90 halamanKelistrikan Rev1anakempatBelum ada peringkat
- Perawatan Sistem Kelistrikan 2Dokumen17 halamanPerawatan Sistem Kelistrikan 2Muhammad Artian100% (1)
- Motor ServoDokumen3 halamanMotor ServoAde Diana PutriBelum ada peringkat
- Rangkaian Kontrol MotorDokumen40 halamanRangkaian Kontrol Motortugi_yono100% (1)
- Rangkaian Pengendali Dan Rangkaian Daya MotorDokumen9 halamanRangkaian Pengendali Dan Rangkaian Daya MotorzakkiBelum ada peringkat
- Cara Memasang Kontaktor MagnetDokumen29 halamanCara Memasang Kontaktor MagnetBhagas AdhityaBelum ada peringkat
- Rangkaian Panel MotorDokumen10 halamanRangkaian Panel MotorCondro DimukoBelum ada peringkat
- Rangkaian DOLDokumen11 halamanRangkaian DOLMas TeBelum ada peringkat
- Rangkaian DOLDokumen11 halamanRangkaian DOLMas TeBelum ada peringkat
- Rangkaian Motor 3 Fasa Mesin CraneDokumen10 halamanRangkaian Motor 3 Fasa Mesin CraneAntoso Djoko100% (1)
- Snto Rangkaian Motor 3 Fasa Putar KananDokumen6 halamanSnto Rangkaian Motor 3 Fasa Putar KananId's RebornBelum ada peringkat
- Contoh Proyek PanelDokumen10 halamanContoh Proyek PanelRuliana Dewi Ratna SariBelum ada peringkat
- Soal Rangkaian Kendali Putar Kanan - KiriDokumen3 halamanSoal Rangkaian Kendali Putar Kanan - KirimenikBelum ada peringkat
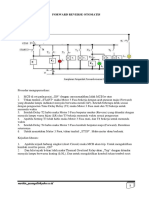
- Forward Reverse OtomatisDokumen2 halamanForward Reverse Otomatiszakiaja100% (1)
- Forward Reverse OtomatisDokumen1 halamanForward Reverse OtomatisMarthinus Pasangallo100% (1)
- Star Delta OtomatisDokumen2 halamanStar Delta OtomatiszakiajaBelum ada peringkat
- Rumusan MasalahDokumen2 halamanRumusan MasalahNanda ramadhanBelum ada peringkat
- CFD (Computation Fluid Dynamics) Pengertian CFDDokumen3 halamanCFD (Computation Fluid Dynamics) Pengertian CFDNanda ramadhanBelum ada peringkat
- Nanda Aulia Ramadhan 18 Motor DahlanderDokumen8 halamanNanda Aulia Ramadhan 18 Motor DahlanderNanda ramadhanBelum ada peringkat
- Bab Iii Metode PenelitianDokumen6 halamanBab Iii Metode PenelitianNanda ramadhanBelum ada peringkat
- Star DeltaDokumen12 halamanStar DeltaNanda ramadhanBelum ada peringkat
- Katalog ItmDokumen19 halamanKatalog ItmNanda ramadhanBelum ada peringkat
- 2.2 Dasar Teori JayidDokumen9 halaman2.2 Dasar Teori JayidNanda ramadhanBelum ada peringkat
- Bab Ii Tinjauan PustakaDokumen18 halamanBab Ii Tinjauan PustakaNanda ramadhanBelum ada peringkat
- NANDA AULIA RAMADHAN (18) Part Winding StarterDokumen8 halamanNANDA AULIA RAMADHAN (18) Part Winding StarterNanda ramadhanBelum ada peringkat
- Nanda Aulia Ramadhan Bab6Dokumen7 halamanNanda Aulia Ramadhan Bab6Nanda ramadhanBelum ada peringkat
- Nanda Aulia Ramadhan Bab6Dokumen7 halamanNanda Aulia Ramadhan Bab6Nanda ramadhanBelum ada peringkat
- ToolsDokumen4 halamanToolsNanda ramadhanBelum ada peringkat
- Nanda Aulia RamadhanDokumen7 halamanNanda Aulia RamadhanNanda ramadhanBelum ada peringkat
- Jurusan Teknik Elektro Fakultas Teknik Universitas Negeri Semarang 2016Dokumen45 halamanJurusan Teknik Elektro Fakultas Teknik Universitas Negeri Semarang 2016Nanda ramadhanBelum ada peringkat
- NANDA AULIA RAMADHAN (18) DahlanderDokumen8 halamanNANDA AULIA RAMADHAN (18) DahlanderNanda ramadhanBelum ada peringkat
- D3-2C - K2 - Motor Kapasitor (Starting & Running)Dokumen17 halamanD3-2C - K2 - Motor Kapasitor (Starting & Running)Nanda ramadhanBelum ada peringkat
- GAMTEK NANDA-Model Yang FixDokumen1 halamanGAMTEK NANDA-Model Yang FixNanda ramadhanBelum ada peringkat
- Gamtek Alissa-Model PDFDokumen1 halamanGamtek Alissa-Model PDFNanda ramadhanBelum ada peringkat
- 09 - Materi 05 - InstalasiDokumen6 halaman09 - Materi 05 - InstalasiNanda ramadhanBelum ada peringkat
- TugasDokumen8 halamanTugasNanda ramadhanBelum ada peringkat
- Karakteristik StartingDokumen7 halamanKarakteristik StartingNanda ramadhanBelum ada peringkat
- Tugas LAB ELDAS RANGKUMAN CHAPTER 5Dokumen2 halamanTugas LAB ELDAS RANGKUMAN CHAPTER 5Nanda ramadhanBelum ada peringkat
- Laporan Il Forward ReverseDokumen14 halamanLaporan Il Forward ReverseNanda ramadhanBelum ada peringkat
- Forward ReverseDokumen19 halamanForward ReverseNanda ramadhanBelum ada peringkat
- Laporan Lab Desain InstalasiDokumen19 halamanLaporan Lab Desain InstalasiNanda ramadhanBelum ada peringkat
- Magnetic Circuit BreakerDokumen3 halamanMagnetic Circuit BreakerNanda ramadhanBelum ada peringkat
- 09 - Materi 05 - InstalasiDokumen6 halaman09 - Materi 05 - InstalasiNanda ramadhanBelum ada peringkat
- PLC Dengan Menggunakan Relay PDFDokumen202 halamanPLC Dengan Menggunakan Relay PDFjoshua andrianBelum ada peringkat
- Forward ReverseDokumen19 halamanForward ReverseNanda ramadhanBelum ada peringkat