Anda mungkin juga menyukai
- Bab 4 Metode Superposisi Langsung-Fx Supartono (Arif) 2-1 Portal TDK GoyangDokumen29 halamanBab 4 Metode Superposisi Langsung-Fx Supartono (Arif) 2-1 Portal TDK GoyangShofyanBelum ada peringkat
- Metode Kekakuan Atau Metode Perpindahan MatriksDokumen14 halamanMetode Kekakuan Atau Metode Perpindahan MatriksSMEIDS50% (2)
- K4 Kolom Langsing - r1Dokumen29 halamanK4 Kolom Langsing - r1reztaSuBelum ada peringkat
- Mekrek 3. CrossDokumen12 halamanMekrek 3. Crossafif alvaro100% (1)
- Analisis Struktur Metode MatriksDokumen51 halamanAnalisis Struktur Metode MatriksAnonymous uNErA4k1P100% (1)
- Tak Tik Pemodelan Finite Element Jembatan KhususDokumen111 halamanTak Tik Pemodelan Finite Element Jembatan KhususU'LaBelum ada peringkat
- Makalah Analisa Struktur Metode MatriksDokumen50 halamanMakalah Analisa Struktur Metode MatriksfbjkbpvdwjBelum ada peringkat
- ANSTRUK 2 Metode KekakuanDokumen35 halamanANSTRUK 2 Metode Kekakuanerika ainun zakinah ikhsanBelum ada peringkat
- Diktat KSM 06Dokumen6 halamanDiktat KSM 06Agung PBelum ada peringkat
- Analisa MatriksDokumen50 halamanAnalisa Matriksabidah fitraBelum ada peringkat
- 2.2 HendrawanDokumen4 halaman2.2 HendrawanNirmala OyBelum ada peringkat
- Bab-6 Analisa Struktur Rangka Bidang (PSBA-I, SA3105)Dokumen15 halamanBab-6 Analisa Struktur Rangka Bidang (PSBA-I, SA3105)erlanggaBelum ada peringkat
- Slope Deflection Method 1. Pendahuluan: Rotasi (Putaran Sudut, ) Translasi (Rotasi Sumbu, R)Dokumen4 halamanSlope Deflection Method 1. Pendahuluan: Rotasi (Putaran Sudut, ) Translasi (Rotasi Sumbu, R)Nisa Nurul Fauziah Al. QaniBelum ada peringkat
- Metode Perpindahan KekakuanDokumen8 halamanMetode Perpindahan KekakuanGuntara Muria AdityawarmanBelum ada peringkat
- Struktur Statis Tak Tentu (SSTT) Persamaan 3 Momen-ADokumen23 halamanStruktur Statis Tak Tentu (SSTT) Persamaan 3 Momen-AYanuar TampubolonBelum ada peringkat
- Bahan Ajar Analisa Struktur IV - 03 PDFDokumen9 halamanBahan Ajar Analisa Struktur IV - 03 PDFVeri HamdaniOfficialBelum ada peringkat
- HBTL4103 Pedagogi Bhs Tamil - VNov11 SJan12 PDFDokumen203 halamanHBTL4103 Pedagogi Bhs Tamil - VNov11 SJan12 PDFpriyaBelum ada peringkat
- Pertemuan 11 PDFDokumen7 halamanPertemuan 11 PDFArista Anggana IIIBelum ada peringkat
- Kuliah ASSTT - Pertemuan 2 - FEM Dan Metode Slope Deflection (Aplikasi Pada Balok Menerus)Dokumen63 halamanKuliah ASSTT - Pertemuan 2 - FEM Dan Metode Slope Deflection (Aplikasi Pada Balok Menerus)Zuhdi Ridwan Al-Hakiki100% (1)
- Analisa Struktur MatriksDokumen46 halamanAnalisa Struktur MatriksNia RidhaBelum ada peringkat
- Modul Mekanika Teknik IV Bab 5emailDokumen18 halamanModul Mekanika Teknik IV Bab 5emailMister BedBelum ada peringkat
- Contoh Soal Plane FrameDokumen18 halamanContoh Soal Plane Framedefa gilangBelum ada peringkat
- Bab 4 Metode Superposisi Langsung-FX SUPARTONO (Arif) 2 BALOKDokumen9 halamanBab 4 Metode Superposisi Langsung-FX SUPARTONO (Arif) 2 BALOKBambang HermansyahBelum ada peringkat
- Modul LSP Course SAP2000Dokumen60 halamanModul LSP Course SAP2000Anjas AntonioBelum ada peringkat
- MATERI 2 ASSTT - ClapeyronDokumen16 halamanMATERI 2 ASSTT - ClapeyronIMAYATUL RA0% (1)
- Clapeyron 1Dokumen6 halamanClapeyron 1dewaBelum ada peringkat
- Mengenal FungsiDokumen11 halamanMengenal FungsiFitri HandayaniBelum ada peringkat
- 10 - Analisis Simpul Dan Mesh Pada ACDokumen8 halaman10 - Analisis Simpul Dan Mesh Pada ACagungBelum ada peringkat
- Metoda Matrik DGN Contoh (Tm3)Dokumen50 halamanMetoda Matrik DGN Contoh (Tm3)Amar JerryBelum ada peringkat
- Balok BernoulliDokumen66 halamanBalok BernoulliAnnisa WulandariBelum ada peringkat
- Kelp 8 - Osil - PTP Kamis Ke 6Dokumen9 halamanKelp 8 - Osil - PTP Kamis Ke 6jokoBelum ada peringkat
- PendahuluanDokumen56 halamanPendahuluanFebriansyah FEBelum ada peringkat
- PROMES Mapel Bidang StudiDokumen1 halamanPROMES Mapel Bidang StudiLatiefBelum ada peringkat
- Modul 8 Profil MajemukDokumen12 halamanModul 8 Profil Majemukilham robbyBelum ada peringkat
- DahlanderDokumen9 halamanDahlanderDinda AnitaBelum ada peringkat
- PDF Osilasi Batang Di Dalam Rongga Silinder Solusi - CompressDokumen2 halamanPDF Osilasi Batang Di Dalam Rongga Silinder Solusi - CompressMuhammad Miswar RamadhanBelum ada peringkat
- 11 Pengukuran Gaya - Torsi - Daya - ZADokumen16 halaman11 Pengukuran Gaya - Torsi - Daya - ZARoida SinagaBelum ada peringkat
- CLAPEYRONDokumen12 halamanCLAPEYRONQorry OktaliaBelum ada peringkat
- Promes Dan KKMDokumen6 halamanPromes Dan KKMaris mulyanaBelum ada peringkat
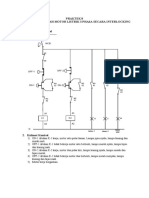
- Laporan Praktikum Instalasi Motor Star DeltaDokumen9 halamanLaporan Praktikum Instalasi Motor Star Deltamink jumper100% (1)
- Modul 7 Desain Tekan Profil MajemukDokumen8 halamanModul 7 Desain Tekan Profil MajemukEdifrizal DarmaBelum ada peringkat
- Slide Kuliah 11 - Analisa Struktur IIDokumen28 halamanSlide Kuliah 11 - Analisa Struktur IIBramantyo WijayaBelum ada peringkat
- Matriks KekakuanDokumen23 halamanMatriks KekakuanGusti Leovan SyachBelum ada peringkat
- PsikotesDokumen6 halamanPsikotesClarissaTheaBelum ada peringkat
- MG Ke-9 Konstruksi RangkaDokumen11 halamanMG Ke-9 Konstruksi RangkaFajar ABABelum ada peringkat
- Bab IV. Dinamika Robot ManipulatorDokumen59 halamanBab IV. Dinamika Robot ManipulatorRifki YafiBelum ada peringkat
- Bab7 Interferensi Dan DifraksiDokumen27 halamanBab7 Interferensi Dan DifraksiSekar Candra PertiwiBelum ada peringkat
- Job Sheet PkdleDokumen52 halamanJob Sheet PkdleIlham MuhamadBelum ada peringkat
- Soft StarterDokumen6 halamanSoft StarterRezki SeptianiBelum ada peringkat
- Bahan Kuliah Mekanisme Anorganik-1Dokumen57 halamanBahan Kuliah Mekanisme Anorganik-1Fickrhy ChamboshyBelum ada peringkat
- ABDUL RAZAK Pemindah Biji-BijianDokumen5 halamanABDUL RAZAK Pemindah Biji-BijianFransen NapituBelum ada peringkat
- Soalan Pk1 SMKK 2019 t5Dokumen1 halamanSoalan Pk1 SMKK 2019 t5Sahara Abdul RahimBelum ada peringkat
- Praktek 8Dokumen3 halamanPraktek 8Siswanto WantoBelum ada peringkat
- Bismillah PPT SeminarDokumen14 halamanBismillah PPT SeminarDela Novita RiyaneBelum ada peringkat
- 0301 Data Hilang Dalam RAKLD Dan RBSLDDokumen10 halaman0301 Data Hilang Dalam RAKLD Dan RBSLDFanyndaBelum ada peringkat
- Metode Energi Regangan PDFDokumen9 halamanMetode Energi Regangan PDFWail IrwanBelum ada peringkat
- MM7 - Statically Indeterminate Structures PDFDokumen5 halamanMM7 - Statically Indeterminate Structures PDFfikri nur kholisBelum ada peringkat
- Matematika Ekonomi: Dyah Nirmala A.J., M.SiDokumen66 halamanMatematika Ekonomi: Dyah Nirmala A.J., M.SiMeilin Dwi PutriBelum ada peringkat
- Kuliah 10 - Aplikasi Rangkaian ListrikDokumen29 halamanKuliah 10 - Aplikasi Rangkaian Listrikmuhammad dimasBelum ada peringkat