Anda mungkin juga menyukai
- Laporan Modul 6 Sistem Kendali Otomatis Dengan Alat Kendali Integral I Pada Suatu Simulator JaringanDokumen11 halamanLaporan Modul 6 Sistem Kendali Otomatis Dengan Alat Kendali Integral I Pada Suatu Simulator JaringanSigit PangestuBelum ada peringkat
- Motor DC DasarDokumen24 halamanMotor DC DasarRizky FajarBelum ada peringkat
- Generator DC Penguat Terpisah Tanpa BebanDokumen12 halamanGenerator DC Penguat Terpisah Tanpa BebanMaulani CandraBelum ada peringkat
- Bab 1 Penyulutan Komponen DayaDokumen26 halamanBab 1 Penyulutan Komponen DayaLevy GantengBelum ada peringkat
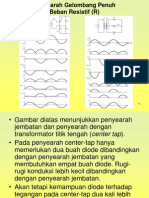
- Penyearah 1 Fasa Gelombang Penuh Beban R & RLDokumen39 halamanPenyearah 1 Fasa Gelombang Penuh Beban R & RLAnggraeny GloryBelum ada peringkat
- Motor Induksi Rotor Lilit 3 FasaDokumen1 halamanMotor Induksi Rotor Lilit 3 FasaAnggraeny Glory0% (2)
- Laporan Praktikum Mesin Listrik Karakteristik Motor DC SeriDokumen10 halamanLaporan Praktikum Mesin Listrik Karakteristik Motor DC SeriWahyuMSBelum ada peringkat
- GENERATOR ARUSDokumen19 halamanGENERATOR ARUSMuhammad HabibiBelum ada peringkat
- LAPORAN PRAKTIKUM TRANSFORMATOR "Transformasi Arus Pada Transformator Satu Fasa"Dokumen9 halamanLAPORAN PRAKTIKUM TRANSFORMATOR "Transformasi Arus Pada Transformator Satu Fasa"ZuraidahBelum ada peringkat
- Mengoperasikan Mesin Multi Fungsi Sebagai Motor DC Shunt Dengan Tahanan Asut)Dokumen6 halamanMengoperasikan Mesin Multi Fungsi Sebagai Motor DC Shunt Dengan Tahanan Asut)Rezki SeptianiBelum ada peringkat
- Starting Motor DC ShuntDokumen4 halamanStarting Motor DC Shuntbudi sugiartoBelum ada peringkat
- Laporan Praktikum Pengukuran Hambatan DarulDokumen7 halamanLaporan Praktikum Pengukuran Hambatan DarulItoez Diwanto100% (1)
- THREE-PHASE RECTIFIERDokumen8 halamanTHREE-PHASE RECTIFIERfvorecastle100% (1)
- DC Chopper BoostDokumen28 halamanDC Chopper Boostananda0% (1)
- Laporan Catu Daya Simetris 2012Dokumen37 halamanLaporan Catu Daya Simetris 2012Andri HapsariBelum ada peringkat
- Motor UniversalDokumen8 halamanMotor UniversalFatkhur Nur HardyBelum ada peringkat
- Karakteristik Generator DC ShuntDokumen12 halamanKarakteristik Generator DC ShuntAliefianBelum ada peringkat
- Nama Kelompok2.Praktikum Polaritas TrafoDokumen8 halamanNama Kelompok2.Praktikum Polaritas TrafoDenson Siburian100% (1)
- LAPORAN BENGKEl SudomoDokumen18 halamanLAPORAN BENGKEl SudomoHai RoniBelum ada peringkat
- KARAKTERISTIK MOTOR ARUS SEARAHDokumen8 halamanKARAKTERISTIK MOTOR ARUS SEARAHFryma ZhafranBelum ada peringkat
- Pengaman Pentanahan Beban Lebih Dari Satu PDFDokumen10 halamanPengaman Pentanahan Beban Lebih Dari Satu PDFAldyBelum ada peringkat
- Laporan 1 Praktek Mesin Mesin Listrik Torsi Listrik Terco Dan Power PackDokumen7 halamanLaporan 1 Praktek Mesin Mesin Listrik Torsi Listrik Terco Dan Power PackRahmadi Eka PutraBelum ada peringkat
- Pengaturan Kecepatan Motor 3 FasaDokumen12 halamanPengaturan Kecepatan Motor 3 FasaRevinda Azzalia Putri WijayaBelum ada peringkat
- Generator DC Penguat TerpisahDokumen4 halamanGenerator DC Penguat TerpisahRyan SiahaanBelum ada peringkat
- Penyearah Gelombang Penuh Dengan Filter LCDokumen8 halamanPenyearah Gelombang Penuh Dengan Filter LCAgung Putra50% (2)
- KWH METER 1 DAN 3 FASADokumen7 halamanKWH METER 1 DAN 3 FASADewi AdilaBelum ada peringkat
- Laporan Pres KapukDokumen8 halamanLaporan Pres KapukLely AcielBelum ada peringkat
- LAPORAN PRAKTIKUM TRANSFORMATORDokumen136 halamanLAPORAN PRAKTIKUM TRANSFORMATORkhoirun yassirBelum ada peringkat
- Laporan Praktikum Sistem Beban Tidak Seimbang (Risma Santani - 141711024)Dokumen17 halamanLaporan Praktikum Sistem Beban Tidak Seimbang (Risma Santani - 141711024)RISMABelum ada peringkat
- 19.4. Thyristor (SCR) : 1.tujuan PercobaanDokumen13 halaman19.4. Thyristor (SCR) : 1.tujuan PercobaanKevin MichaelBelum ada peringkat
- OPTIMAL PERTANYAAN BAB 1-5Dokumen27 halamanOPTIMAL PERTANYAAN BAB 1-5Firman SyahBelum ada peringkat
- Pertemuan 4-6Dokumen51 halamanPertemuan 4-6Rahma AlyaBelum ada peringkat
- ChopperDokumen20 halamanChopperDio Dananjaya BomBelum ada peringkat
- Laporan MotorDokumen10 halamanLaporan MotorDindaPermatasariBelum ada peringkat
- Jurnal Pengendalian SCRDokumen7 halamanJurnal Pengendalian SCRirvan setiajiBelum ada peringkat
- Pengaturan Kecepatan Dan Karakteristik Motor DC ShuntDokumen11 halamanPengaturan Kecepatan Dan Karakteristik Motor DC ShuntHerry TBelum ada peringkat
- LAPORAN Percobaan Karakteristik Motor DCDokumen10 halamanLAPORAN Percobaan Karakteristik Motor DCoktavianBelum ada peringkat
- OPTIMASI TRANSFORMATORDokumen8 halamanOPTIMASI TRANSFORMATORFendy HendrawanBelum ada peringkat
- AC RegulatorDokumen6 halamanAC RegulatorzeffrypasaribuBelum ada peringkat
- Makalah No Load & Load Test PraktikumDokumen6 halamanMakalah No Load & Load Test Praktikumsely kusuma aBelum ada peringkat
- MOTOR DC PENGUATDokumen6 halamanMOTOR DC PENGUATReyhan RahmatBelum ada peringkat
- Generator DCDokumen20 halamanGenerator DCBima Cahya NugrahaBelum ada peringkat
- Lap 1 PR Mesin ListrikDokumen7 halamanLap 1 PR Mesin ListrikUsi ZaharaBelum ada peringkat
- DC ChopperDokumen26 halamanDC ChopperWillyMuhammadHalimBelum ada peringkat
- Pengendali 3 Lampu Otomatis BerurutanDokumen5 halamanPengendali 3 Lampu Otomatis BerurutanFatmi Suciati RBelum ada peringkat
- Analisa Kesimpulan Motor DC SeriesDokumen3 halamanAnalisa Kesimpulan Motor DC SeriesMuhammad Affan DarmawanBelum ada peringkat
- Jobsheet 2Dokumen14 halamanJobsheet 2aididBelum ada peringkat
- KARAKTERISTIK MAGNETISASIDokumen11 halamanKARAKTERISTIK MAGNETISASIanjengbuldogBelum ada peringkat
- Bab 4.2 Penyearah Gelombang PenuhDokumen66 halamanBab 4.2 Penyearah Gelombang PenuhluthfanbBelum ada peringkat
- PolaritasDokumen16 halamanPolaritasHazmei PanduBelum ada peringkat
- Kontaktor On PrioritasDokumen5 halamanKontaktor On PrioritasArya PerdanaBelum ada peringkat
- Topik 1 Percobaan Generator Penguat Terpisah, Generator Shunt Dan Generator Seri A. Alat Dan BahanDokumen27 halamanTopik 1 Percobaan Generator Penguat Terpisah, Generator Shunt Dan Generator Seri A. Alat Dan BahanDwi YahyoBelum ada peringkat
- Elda Penyearah Setengah GelombangDokumen19 halamanElda Penyearah Setengah GelombangFaisal AhcmadBelum ada peringkat
- KONDUKTIVITASDokumen12 halamanKONDUKTIVITASTomi StarkBelum ada peringkat
- Transistor SaklarDokumen10 halamanTransistor SaklarIQbàl Nak BhrocokBelum ada peringkat
- Laporan Praktek Rancangan ListrikDokumen10 halamanLaporan Praktek Rancangan ListrikjhonesBelum ada peringkat
- PertanyaanDokumen2 halamanPertanyaanFajar AnshoriBelum ada peringkat
- Jtptunimus GDL Syarifmahm 7705 3 Bab2Dokumen148 halamanJtptunimus GDL Syarifmahm 7705 3 Bab2khoirun yassirBelum ada peringkat
- Elctr - 14. Motor DC Penguat TerpisahDokumen15 halamanElctr - 14. Motor DC Penguat TerpisahRizki AkbarBelum ada peringkat
- Pengaturan Putaran Motor DC Eksitasi TerpisahDokumen14 halamanPengaturan Putaran Motor DC Eksitasi TerpisahNurul AkmalBelum ada peringkat
- Review Uas Teg TinggiDokumen2 halamanReview Uas Teg TinggiWahyuMSBelum ada peringkat
- 16PTT - Probalitas TembusDokumen20 halaman16PTT - Probalitas TembusWahyuMSBelum ada peringkat
- PTT - Tegangan Tembus Udara Dengan Tegangan Tinggi DCDokumen21 halamanPTT - Tegangan Tembus Udara Dengan Tegangan Tinggi DCWahyuMSBelum ada peringkat
- PTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraDokumen15 halamanPTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraWahyuMSBelum ada peringkat
- 14PTT - Pembangkitan Dan Pengukuran Tegangan Tinggi ImpusDokumen15 halaman14PTT - Pembangkitan Dan Pengukuran Tegangan Tinggi ImpusWahyuMSBelum ada peringkat
- PTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraDokumen15 halamanPTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraWahyuMSBelum ada peringkat
- 13PTT - Pengukuran Tembus Listrik Ac Pada Isolasi Zat Cair - Minyak TrafoDokumen17 halaman13PTT - Pengukuran Tembus Listrik Ac Pada Isolasi Zat Cair - Minyak TrafoWahyuMSBelum ada peringkat
- OPTIMASI SALURANDokumen77 halamanOPTIMASI SALURANWahyuMSBelum ada peringkat
- Laporan Praktikum Mesin Listrik Karakteristik Motor DC Eksitasi TerpisahDokumen10 halamanLaporan Praktikum Mesin Listrik Karakteristik Motor DC Eksitasi TerpisahWahyuMSBelum ada peringkat
- PTT - Bagian-Bagian Sistem TenagaDokumen152 halamanPTT - Bagian-Bagian Sistem TenagaWahyuMSBelum ada peringkat
- Laporan Praktikum Mesin Listrik Karakteristik Generator DC Eksitasi TerpisahDokumen14 halamanLaporan Praktikum Mesin Listrik Karakteristik Generator DC Eksitasi TerpisahWahyuMSBelum ada peringkat
- Laporan Praktikum Mesin Listrik Karakteristik Motor DC SeriDokumen10 halamanLaporan Praktikum Mesin Listrik Karakteristik Motor DC SeriWahyuMSBelum ada peringkat
- 15PTT - Korona Ac Dan DCDokumen26 halaman15PTT - Korona Ac Dan DCWahyuMSBelum ada peringkat
- Audit Energi 6E2 - 2Dokumen13 halamanAudit Energi 6E2 - 2WahyuMSBelum ada peringkat
- Energi AnginDokumen70 halamanEnergi AnginWahyuMSBelum ada peringkat
- POMPADokumen3 halamanPOMPAWahyuMSBelum ada peringkat
- PEGAS HELIXDokumen15 halamanPEGAS HELIXWahyuMSBelum ada peringkat
- POMPADokumen3 halamanPOMPAWahyuMSBelum ada peringkat
- PTT - Tegangan Tembus Udara Dengan Tegangan Tinggi DCDokumen21 halamanPTT - Tegangan Tembus Udara Dengan Tegangan Tinggi DCWahyuMSBelum ada peringkat
- PTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraDokumen15 halamanPTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraWahyuMSBelum ada peringkat
- PTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraDokumen15 halamanPTT - Pengukuran Tegangan Tembus Ac Terhadap Variasi Tekanan UdaraWahyuMSBelum ada peringkat
- Tugas Kewirausahaan IiiDokumen8 halamanTugas Kewirausahaan IiiWahyuMSBelum ada peringkat
- Wahyu Miraj Setiavi-4E-Product-Market FitDokumen8 halamanWahyu Miraj Setiavi-4E-Product-Market FitWahyuMSBelum ada peringkat
- Kedudukan Bahasa IndonesiaDokumen12 halamanKedudukan Bahasa IndonesiaWahyuMSBelum ada peringkat
- Kedudukan Bahasa IndonesiaDokumen12 halamanKedudukan Bahasa IndonesiaWahyuMSBelum ada peringkat