Anda mungkin juga menyukai
- Tugas Pertemuan 7-DikonversiDokumen7 halamanTugas Pertemuan 7-Dikonversiaurora azaleaBelum ada peringkat
- Tugas 7Dokumen4 halamanTugas 7aurora azaleaBelum ada peringkat
- Peralatan Otomasi IndustriDokumen129 halamanPeralatan Otomasi Industriharri purnomoBelum ada peringkat
- Tugas MekatronikaDokumen32 halamanTugas Mekatronikadaviano rajagukgukBelum ada peringkat
- Ringkasan Pengantar Mekatronika Dan SensorDokumen5 halamanRingkasan Pengantar Mekatronika Dan SensorSamsulBelum ada peringkat
- Laporan TPG2 (FARIS)Dokumen36 halamanLaporan TPG2 (FARIS)Faris A FBelum ada peringkat
- Atribut Dan Spesifikasi SensorDokumen43 halamanAtribut Dan Spesifikasi SensorRetzaAkbarMulyadiBelum ada peringkat
- MEKATRONIKADokumen18 halamanMEKATRONIKAAkbar AliBelum ada peringkat
- Pengendali Kecepatan Motor DC Menggunakan Sensor Hall Berbasis Mikrokontroler Atmega 8535Dokumen8 halamanPengendali Kecepatan Motor DC Menggunakan Sensor Hall Berbasis Mikrokontroler Atmega 8535shabira aqillaBelum ada peringkat
- Final Tes MekatronikaDokumen4 halamanFinal Tes Mekatronikamarisa jeanetteBelum ada peringkat
- Bab1 Sistem Pengapian Elektronik - 1Dokumen19 halamanBab1 Sistem Pengapian Elektronik - 1DimasBelum ada peringkat
- Tugas Resume 5 - Reza Widehan - 1104201147Dokumen5 halamanTugas Resume 5 - Reza Widehan - 1104201147Resa WidehanBelum ada peringkat
- Aplikasi TranduserDokumen5 halamanAplikasi TranduserDheo RanggaBelum ada peringkat
- Motor DCDokumen11 halamanMotor DCWildan Fadlan KhairinBelum ada peringkat
- Tugas Resume 5Dokumen5 halamanTugas Resume 5Resa WidehanBelum ada peringkat
- Timer PWM Motor DCDokumen28 halamanTimer PWM Motor DCelvianaBelum ada peringkat
- Job Aplikasi Instruksi Dasar 2Dokumen11 halamanJob Aplikasi Instruksi Dasar 2Murti AmangestiBelum ada peringkat
- Pemodelan Dan SimulasiDokumen14 halamanPemodelan Dan SimulasiYuda MartinzBelum ada peringkat
- StirrerDokumen14 halamanStirrerFarida LailaBelum ada peringkat
- 1.1. Latar BelakangDokumen65 halaman1.1. Latar BelakangArchBelum ada peringkat
- Elektronika DayaDokumen30 halamanElektronika DayaFebi Nabila AknurBelum ada peringkat
- MAKALAH MEKATRONIKA SENSOR Dan AKTUATORDokumen9 halamanMAKALAH MEKATRONIKA SENSOR Dan AKTUATORirsad nurfiqriBelum ada peringkat
- Makalah MektronikaDokumen9 halamanMakalah MektronikaSixz PraztBelum ada peringkat
- Makalah Sensor Dan Aktuator Pada IndustriDokumen14 halamanMakalah Sensor Dan Aktuator Pada IndustriArinda Dwi WahyuBelum ada peringkat
- Direct Online 1Dokumen15 halamanDirect Online 1MujibRiyadiBelum ada peringkat
- Media IndustriDokumen11 halamanMedia IndustriRizki CholisBelum ada peringkat
- Sulhamdi Akbar (Laporan Praktikum)Dokumen11 halamanSulhamdi Akbar (Laporan Praktikum)Ricko Rachmadillah SiraitBelum ada peringkat
- Komponen Pasif & Alat Ukur ListrikDokumen18 halamanKomponen Pasif & Alat Ukur ListrikMia Andi LoloBelum ada peringkat
- Proposal Motor DC ToniDokumen14 halamanProposal Motor DC ToniYogie NovriandiBelum ada peringkat
- JURNAL InstruemntasDokumen15 halamanJURNAL InstruemntasFebriyanti SBelum ada peringkat
- Arya Winara Tugas1 Teori SisdalDokumen9 halamanArya Winara Tugas1 Teori SisdalArya Winara SaputraBelum ada peringkat
- KontaktorDokumen2 halamanKontaktordhanangspBelum ada peringkat
- Pengapian Elektronik 1Dokumen9 halamanPengapian Elektronik 1Agus Wahyu IndrajidBelum ada peringkat
- Tugas Sensor Dan AktuatorDokumen18 halamanTugas Sensor Dan AktuatorDanny Muhammad NashruddinBelum ada peringkat
- Makalah Motor DCDokumen15 halamanMakalah Motor DCsandiBelum ada peringkat
- Kelompok 5 Kelas A - Pengukuran Perpindahan Posisi ADokumen18 halamanKelompok 5 Kelas A - Pengukuran Perpindahan Posisi AFaizal YogaBelum ada peringkat
- Simulasi Rangkaian Catu Daya Dan Pengkondisi SinyalDokumen15 halamanSimulasi Rangkaian Catu Daya Dan Pengkondisi SinyalGemala HardinasintaBelum ada peringkat
- Tugas Pengukuran Teknik Mafazan Akbar (1610913019)Dokumen8 halamanTugas Pengukuran Teknik Mafazan Akbar (1610913019)Yogie FernandoBelum ada peringkat
- TUGAS TAMBAHAN - Muhamad Muazziz - 202171010Dokumen7 halamanTUGAS TAMBAHAN - Muhamad Muazziz - 202171010Ajah ebangBelum ada peringkat
- Makalah-Konverter Daya Dan PWM Generator Kelompok 2Dokumen14 halamanMakalah-Konverter Daya Dan PWM Generator Kelompok 2Fernando Bregin TariganBelum ada peringkat
- M11 HP2 12Dokumen6 halamanM11 HP2 12Jason MaldonadoBelum ada peringkat
- 3.rangkaian Catu Daya Ku FixDokumen24 halaman3.rangkaian Catu Daya Ku FixHaslinda GaffarBelum ada peringkat
- Ayu Lestari - 032100004 - Laporan Praktikum Pengukuran Besaran Listrik, Faktor Kerja, Daya, Dan EnergiDokumen23 halamanAyu Lestari - 032100004 - Laporan Praktikum Pengukuran Besaran Listrik, Faktor Kerja, Daya, Dan EnergiRicko Rachmadillah SiraitBelum ada peringkat
- Kontaktor Magne81Dokumen3 halamanKontaktor Magne81Oktorio SiagianBelum ada peringkat
- Potensiometer Adalah Resistor Tiga Terminal Dengan Sambungan Geser Yang MembentukDokumen5 halamanPotensiometer Adalah Resistor Tiga Terminal Dengan Sambungan Geser Yang Membentuk1929 Tania Florensia GintingBelum ada peringkat
- Word PresentasiDokumen13 halamanWord Presentasiannisa tishanaBelum ada peringkat
- Laporan ETAP Kelompok 4 - A1Dokumen14 halamanLaporan ETAP Kelompok 4 - A1Brigitta Endah SusilowatiBelum ada peringkat
- Soal Dan Jawaban - MekatronikADokumen3 halamanSoal Dan Jawaban - MekatronikAnoerha61Belum ada peringkat
- Catu Daya - Elektronika IndustriDokumen9 halamanCatu Daya - Elektronika IndustribangkeguringtaBelum ada peringkat
- Laporan Pengaturan Kecepatan Motor DC Ekasitasi TerpisahDokumen17 halamanLaporan Pengaturan Kecepatan Motor DC Ekasitasi TerpisahNurul AkmalBelum ada peringkat
- KONTAKTORDokumen2 halamanKONTAKTORAgus Al- MuhajirBelum ada peringkat
- BAB II Komponen ElektronikaDokumen9 halamanBAB II Komponen ElektronikaINDRA GUNAWANPEND.MATEMATIKABelum ada peringkat
- Diktat TTL - 1Dokumen14 halamanDiktat TTL - 1Fadhil AlfathBelum ada peringkat
- Makalah PneumatikDokumen10 halamanMakalah PneumatikAan SynsterBelum ada peringkat
- Makalah Kelompok - 3-1Dokumen25 halamanMakalah Kelompok - 3-1Muhammad Irfan ArifBelum ada peringkat
- 1 SMDokumen10 halaman1 SMteodosio cardosoBelum ada peringkat
- Peralatan Gardu IndukDokumen7 halamanPeralatan Gardu IndukBudilaklakseruiBelum ada peringkat
- Makalah Sensor Dan Aktuator 4 PDF FreeDokumen13 halamanMakalah Sensor Dan Aktuator 4 PDF FreeRofi'i FaizalBelum ada peringkat
- Jawaban Nomor 2Dokumen8 halamanJawaban Nomor 2aurora azaleaBelum ada peringkat
- 031900009, 031900010, 031900019, 031900023, 031900031, 031800007 - Tugas 2 MekatronikaDokumen14 halaman031900009, 031900010, 031900019, 031900023, 031900031, 031800007 - Tugas 2 Mekatronikaaurora azaleaBelum ada peringkat
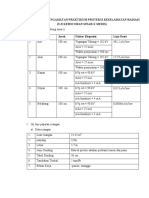
- Lembar Data Pengamatan Praktikum Proteksi Keselamatan Radiasi Sinar X MedisDokumen3 halamanLembar Data Pengamatan Praktikum Proteksi Keselamatan Radiasi Sinar X Medisaurora azaleaBelum ada peringkat
- Aurora Azalea Rania - Generator InduksiDokumen3 halamanAurora Azalea Rania - Generator Induksiaurora azaleaBelum ada peringkat
- Properti Dari Transformasi LaplaceDokumen11 halamanProperti Dari Transformasi Laplaceaurora azaleaBelum ada peringkat
- KREATIV (Kursus Online Autodesk Inventor) 1. Deskripsi Bisnis A. Value CreationDokumen3 halamanKREATIV (Kursus Online Autodesk Inventor) 1. Deskripsi Bisnis A. Value Creationaurora azaleaBelum ada peringkat
- 031900009, 031900010, 031900019, 031900023, 031900031, 031800007 - Tugas 2 MekatronikaDokumen17 halaman031900009, 031900010, 031900019, 031900023, 031900031, 031800007 - Tugas 2 Mekatronikaaurora azaleaBelum ada peringkat
- Lembar Pengamatan Praktikum Pengereman Motor Ac 3 FasaDokumen1 halamanLembar Pengamatan Praktikum Pengereman Motor Ac 3 Fasaaurora azaleaBelum ada peringkat
- Aurora Azalea Rania - Tugas 2 - Instalasi Tenaga ListrikDokumen6 halamanAurora Azalea Rania - Tugas 2 - Instalasi Tenaga Listrikaurora azaleaBelum ada peringkat
- Lapprak Eddy Current Prak MekbanDokumen7 halamanLapprak Eddy Current Prak Mekbanaurora azaleaBelum ada peringkat
- Tugas Kelompok InskenDokumen3 halamanTugas Kelompok Inskenaurora azaleaBelum ada peringkat
- Tugas Makalah Bahasa IndonesiaDokumen14 halamanTugas Makalah Bahasa Indonesiaaurora azaleaBelum ada peringkat
- Temperature SensorsDokumen14 halamanTemperature Sensorsaurora azaleaBelum ada peringkat
- Pengertian Sensor SuhuDokumen1 halamanPengertian Sensor Suhuaurora azaleaBelum ada peringkat
- 031900003, 031900010, 031900013 - Resume Instrumentasi KendaliDokumen20 halaman031900003, 031900010, 031900013 - Resume Instrumentasi Kendaliaurora azaleaBelum ada peringkat
- 031900009, 031900010, 031900011 - Lapprak Utr SwsiDokumen18 halaman031900009, 031900010, 031900011 - Lapprak Utr Swsiaurora azaleaBelum ada peringkat
- Lapprak Generator 3 FasaDokumen5 halamanLapprak Generator 3 Fasaaurora azaleaBelum ada peringkat
- Laprak Okpr Reaktivitas Batang KendaliDokumen14 halamanLaprak Okpr Reaktivitas Batang Kendaliaurora azaleaBelum ada peringkat
- Bagian eDokumen4 halamanBagian eaurora azaleaBelum ada peringkat
- Laporan Praktikum GMDokumen14 halamanLaporan Praktikum GMaurora azaleaBelum ada peringkat
- BAB II Tinjauan PustakaDokumen2 halamanBAB II Tinjauan Pustakaaurora azaleaBelum ada peringkat
- TUMANDokumen10 halamanTUMANaurora azaleaBelum ada peringkat
- Lapprak Kalibrasi Alat UkurDokumen7 halamanLapprak Kalibrasi Alat Ukuraurora azaleaBelum ada peringkat
- Laporan Arduino Buka Pintu OtomatisDokumen8 halamanLaporan Arduino Buka Pintu Otomatisaurora azaleaBelum ada peringkat