Anda mungkin juga menyukai
- Diajukan Untuk Memenuhi Tugas Mata Kuliah Matematika DiskritDokumen20 halamanDiajukan Untuk Memenuhi Tugas Mata Kuliah Matematika DiskritFK-POM pemudaBelum ada peringkat
- Adoc - Pub Struktur Baja I Perhitungan Dimensi Batang TekanDokumen20 halamanAdoc - Pub Struktur Baja I Perhitungan Dimensi Batang Tekanjimmy ajaBelum ada peringkat
- Teori-Castigliano (Modul 3) PDFDokumen43 halamanTeori-Castigliano (Modul 3) PDFWindy Nadilla PutriBelum ada peringkat
- SI-2131 Mekanika Fluida Dan Hidraulika (Pengenalan Analisis Dimensi-Minggu5)Dokumen20 halamanSI-2131 Mekanika Fluida Dan Hidraulika (Pengenalan Analisis Dimensi-Minggu5)Devina CalistaBelum ada peringkat
- GETARAN MEKANIK SISTEM BERDERAJAT KEBEBASAN TUNGGALDokumen15 halamanGETARAN MEKANIK SISTEM BERDERAJAT KEBEBASAN TUNGGALMhd NafisBelum ada peringkat
- Pertemuan Tutorial 3Dokumen15 halamanPertemuan Tutorial 3RA-Uswatun Hasanah Lombok UtaraBelum ada peringkat
- DINAMIKA STRUKTURDokumen14 halamanDINAMIKA STRUKTURSri WhyuniBelum ada peringkat
- DEKOMPOSILUDokumen10 halamanDEKOMPOSILULefko Sri BudianoviBelum ada peringkat
- MEKANIKA STATISTIKDokumen23 halamanMEKANIKA STATISTIKcokgdeBelum ada peringkat
- PRESENTASI MEKANIKA FLUIDA KelompokDokumen43 halamanPRESENTASI MEKANIKA FLUIDA KelompokRizwan Cynk ThieBelum ada peringkat
- 02 Logika Matematika PDFDokumen17 halaman02 Logika Matematika PDFPutri Ulyatun Niswah67% (3)
- Logika Proposisional TKDokumen43 halamanLogika Proposisional TKcathy_vanchaBelum ada peringkat
- Analisa StrukturDokumen10 halamanAnalisa StrukturAlvonzo KondoalloBelum ada peringkat
- Metode Energi Regangan PDFDokumen9 halamanMetode Energi Regangan PDFWail IrwanBelum ada peringkat
- Kekuatan Kolom KompositDokumen7 halamanKekuatan Kolom KompositTaufiq Adi WijayaBelum ada peringkat
- Toaz - Info Turunan Integral Matriks PRDokumen35 halamanToaz - Info Turunan Integral Matriks PRred 16Belum ada peringkat
- BAB IV - Struktur Tekan 1Dokumen8 halamanBAB IV - Struktur Tekan 1Aguzt RzBelum ada peringkat
- Modul 1-Teori AtomDokumen36 halamanModul 1-Teori AtomTresna BayuBelum ada peringkat
- Logika MatematikaDokumen28 halamanLogika MatematikaBriyan OzawaBelum ada peringkat
- Hukum penyerapan menyatakan bahwa p (p q) p.Penyelesaian:1) p (p q) 2) = (p p) (p q) (Hukum distributif) 3) = p (p q) (Hukum idempoten)4) = (p p) (p q) (Hukum distributifDokumen72 halamanHukum penyerapan menyatakan bahwa p (p q) p.Penyelesaian:1) p (p q) 2) = (p p) (p q) (Hukum distributif) 3) = p (p q) (Hukum idempoten)4) = (p p) (p q) (Hukum distributifTeuku Muhammad RivaiBelum ada peringkat
- Modul Persamaan SimultanDokumen20 halamanModul Persamaan SimultanWidodo PurwantoBelum ada peringkat
- PersDiferensialDokumen55 halamanPersDiferensialYohan KrisnandiBelum ada peringkat
- MODUL 6 (Fgs Multiplikatif)Dokumen38 halamanMODUL 6 (Fgs Multiplikatif)Rayyan MuzakyBelum ada peringkat
- ANALISIS DIMENSIONAL DAN KESERUPAANDokumen24 halamanANALISIS DIMENSIONAL DAN KESERUPAANchristianBelum ada peringkat
- Regresi Spline Nonparametrik PDFDokumen29 halamanRegresi Spline Nonparametrik PDFanggitaBelum ada peringkat
- 3d3 - Model Matematika Sistem ElektromekanikaDokumen12 halaman3d3 - Model Matematika Sistem Elektromekanikaalvida pramudiantiBelum ada peringkat
- Bentuk molekul H2O adalah bentuk sudutDokumen39 halamanBentuk molekul H2O adalah bentuk sudutZahra RaBelum ada peringkat
- No 3 Fisika IntiDokumen5 halamanNo 3 Fisika IntiFarihun Ni'mahBelum ada peringkat
- Model Matematika Sistem ElektromekanikaDokumen12 halamanModel Matematika Sistem ElektromekanikaNindi Widia Devi RahmasariBelum ada peringkat
- GELOMBANG AKUSTIKDokumen47 halamanGELOMBANG AKUSTIKSri Rezeki BerutuBelum ada peringkat
- TAUTOLOGI DAN KONTRADIKSIDokumen8 halamanTAUTOLOGI DAN KONTRADIKSIFikah MaharaniBelum ada peringkat
- Bahan Kuliah Mekanisme Anorganik-1Dokumen57 halamanBahan Kuliah Mekanisme Anorganik-1Fickrhy ChamboshyBelum ada peringkat
- Kons. Statis TertentuDokumen9 halamanKons. Statis TertentuSiska SembiringBelum ada peringkat
- Soal MekanikaDokumen5 halamanSoal MekanikaAdemas FazriBelum ada peringkat
- Matematika Diskrit Bagus TabianDokumen15 halamanMatematika Diskrit Bagus TabianIqbalBelum ada peringkat
- p (p q) p (Hukum penyerapan sudah terbuktiDokumen61 halamanp (p q) p (Hukum penyerapan sudah terbuktiMochammad NajibBelum ada peringkat
- LAPLACE PENYELESAIANDokumen13 halamanLAPLACE PENYELESAIANdeviBelum ada peringkat
- TRIGONOMETRIDokumen10 halamanTRIGONOMETRIAnisha FitriBelum ada peringkat
- Soal TO OSP PejuangOSN-2-3Dokumen5 halamanSoal TO OSP PejuangOSN-2-3lillyasvyl lBelum ada peringkat
- MENENTUKAN PARAMETERDokumen8 halamanMENENTUKAN PARAMETERRhischa Assabet Safi'iBelum ada peringkat
- 14 Pekan Kuliah Mekanika BDokumen95 halaman14 Pekan Kuliah Mekanika Brisky mbayowoBelum ada peringkat
- Propositional LogicDokumen8 halamanPropositional LogicRaraListianiBelum ada peringkat
- Bab-2 SdofDokumen23 halamanBab-2 SdofNawaitsuk IcuzBelum ada peringkat
- Logika Matematika Diktat 3Dokumen27 halamanLogika Matematika Diktat 3MarioJanBelum ada peringkat
- Energi Radiasi Benda HitamDokumen9 halamanEnergi Radiasi Benda HitamDimas Fadili RohmanBelum ada peringkat
- 14 Pekan Kuliah Mekanika B PDFDokumen95 halaman14 Pekan Kuliah Mekanika B PDFAliovich HermanBelum ada peringkat
- TR 3 FISIKA ZAT PADATDokumen5 halamanTR 3 FISIKA ZAT PADATEva Rolita HarianjaBelum ada peringkat
- LAPLACEDokumen41 halamanLAPLACEMichael ThungBelum ada peringkat
- Estimasi Parameter KemampuanDokumen4 halamanEstimasi Parameter KemampuanDesy KumalaBelum ada peringkat
- F 106 1992 Pengkajian Pembakuan Struktur Goronggorong Beton Bulat MutuDokumen74 halamanF 106 1992 Pengkajian Pembakuan Struktur Goronggorong Beton Bulat MutuSyahrulBelum ada peringkat
- Bandul MatematisDokumen4 halamanBandul MatematisAtik ana latifahBelum ada peringkat
- Mekanika Fluida K9 (JMAFIFF) - 1Dokumen28 halamanMekanika Fluida K9 (JMAFIFF) - 1Fajar CahyaBelum ada peringkat
- Fisika Dasar - Tugas 14 - Rudvan Andari Pasoma - 2007136224 - Teknik Sipil S1 BDokumen12 halamanFisika Dasar - Tugas 14 - Rudvan Andari Pasoma - 2007136224 - Teknik Sipil S1 BRudvan PasomaBelum ada peringkat
- Soal LKM 28Dokumen4 halamanSoal LKM 28Almas SafanahBelum ada peringkat
- ZAT PADATDokumen14 halamanZAT PADATNof Putria TentiBelum ada peringkat
- Sub-Bab 13-4 FUNGSI BERNILAI VEKTOR DAN GERAK KURVILINEAR PDFDokumen4 halamanSub-Bab 13-4 FUNGSI BERNILAI VEKTOR DAN GERAK KURVILINEAR PDFRahmaton wahyuBelum ada peringkat
- 14 Pekan Kuliah Mekanika BDokumen97 halaman14 Pekan Kuliah Mekanika BSetrie FrimayriBelum ada peringkat
- Ekuivalensi Logis 3 2015Dokumen6 halamanEkuivalensi Logis 3 2015Dhyan FitryYaBelum ada peringkat
- Transformasi LaplaceDokumen25 halamanTransformasi LaplaceDharmawanSetyansyahBelum ada peringkat
- Kuliah Ke-1Dokumen29 halamanKuliah Ke-1DharmawanSetyansyahBelum ada peringkat
- Ek I ValensiDokumen4 halamanEk I ValensiLechyana Zahra SuhartoBelum ada peringkat
- Tampak AtasDokumen1 halamanTampak AtasDharmawanSetyansyahBelum ada peringkat
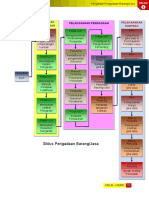
- 2a Siklus Pengadaan PDFDokumen1 halaman2a Siklus Pengadaan PDFDharmawanSetyansyahBelum ada peringkat
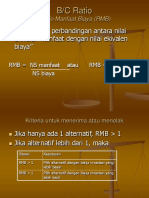
- BC RatioDokumen7 halamanBC RatioLechyana Zahra SuhartoBelum ada peringkat
- ANT Mesin PilihanDokumen4 halamanANT Mesin PilihanLechyana Zahra SuhartoBelum ada peringkat
- Analisa Nilai Sekarang (ANS/NPVDokumen6 halamanAnalisa Nilai Sekarang (ANS/NPVLechyana Zahra SuhartoBelum ada peringkat
- Pemanfaatan Kembali Limbah Kulit JagungDokumen12 halamanPemanfaatan Kembali Limbah Kulit JagungnanaBelum ada peringkat
- 7 Momentum Dan Impuls PDFDokumen33 halaman7 Momentum Dan Impuls PDFHerlinda LindaBelum ada peringkat
- ANT Mesin PilihanDokumen4 halamanANT Mesin PilihanLechyana Zahra SuhartoBelum ada peringkat
- Biaya Layanan PengujianDokumen21 halamanBiaya Layanan PengujianUmar KerenBelum ada peringkat
- Dinh GempaDokumen27 halamanDinh GempaadithiaBelum ada peringkat
- Rapi Fix 1Dokumen11 halamanRapi Fix 1DharmawanSetyansyahBelum ada peringkat
- Gambar Standar Rangka Baja Bangunan Atas Jembatan Kelas A Dan BDokumen180 halamanGambar Standar Rangka Baja Bangunan Atas Jembatan Kelas A Dan BIkhsanudin St100% (1)