Anda mungkin juga menyukai
- Proposal PKLDokumen10 halamanProposal PKLYossy NurvitaBelum ada peringkat
- Laporan KampusDokumen159 halamanLaporan KampusFrauzt LeonyBelum ada peringkat
- Aktivasi ZeolitDokumen10 halamanAktivasi ZeolitAdithyanti FebrianaBelum ada peringkat
- Buku Panduan SLK FTUIDokumen17 halamanBuku Panduan SLK FTUImuhammad_hatta_adamBelum ada peringkat
- BISMILLAH LAPORAN Praktikum Karakteristik Pengendali FIX FIX PDFDokumen37 halamanBISMILLAH LAPORAN Praktikum Karakteristik Pengendali FIX FIX PDFHmtk PolinemaBelum ada peringkat
- Jenis Koagulan Dan Flokulan PDFDokumen15 halamanJenis Koagulan Dan Flokulan PDFSurya AdeliaBelum ada peringkat
- Tugas CPG Kelompok 2 (Gas)Dokumen10 halamanTugas CPG Kelompok 2 (Gas)SafawBelum ada peringkat
- Annie Dan Rima PDFDokumen164 halamanAnnie Dan Rima PDFlibbissujessy0% (1)
- Prob 8 Dan Prob 9Dokumen9 halamanProb 8 Dan Prob 9Daning Kinanti SutamaBelum ada peringkat
- Proposal Pkpi - PT Papertech Indonesia NewDokumen15 halamanProposal Pkpi - PT Papertech Indonesia NewPerbowo PringgoBelum ada peringkat
- HargaDokumen2 halamanHargaghaniangga11Belum ada peringkat
- Bab Xi Aliran Non-IdealDokumen33 halamanBab Xi Aliran Non-IdealSiti widayanaBelum ada peringkat
- LAPORAN TA ANDI PUTRI AWALIA & RIDHA ILAHI (2) - DikonversiDokumen68 halamanLAPORAN TA ANDI PUTRI AWALIA & RIDHA ILAHI (2) - DikonversiRika RahieemBelum ada peringkat
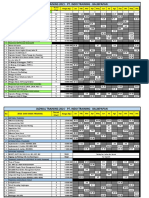
- Jadwal Training PT Indo Training 2021 BalikpapanDokumen10 halamanJadwal Training PT Indo Training 2021 BalikpapanRaid LilinBelum ada peringkat
- Profil S2 Renewable Energi - PolsriDokumen2 halamanProfil S2 Renewable Energi - Polsriandrei kesumaBelum ada peringkat
- CrackingDokumen16 halamanCrackingDjiquwatan AbrarBelum ada peringkat
- SR KelompokC Tugas7Dokumen12 halamanSR KelompokC Tugas7Syarafina RamadantiBelum ada peringkat
- Makalah TRK 3Dokumen7 halamanMakalah TRK 3Mawaddah Nur TambakBelum ada peringkat
- Utilitas Listrik PabrikDokumen2 halamanUtilitas Listrik PabriknadiaBelum ada peringkat
- Acrylamide Dari AcrylonitrileDokumen1 halamanAcrylamide Dari AcrylonitrilesimoehchBelum ada peringkat
- Proses Pengolahan Air BersihDokumen125 halamanProses Pengolahan Air Bersihtirta anomBelum ada peringkat
- Bag 12 - REV Analisis KestabilanDokumen46 halamanBag 12 - REV Analisis KestabilanGita WulandariBelum ada peringkat
- 3.1.013. Instruksi Kerja Regenerasi MixbedDokumen4 halaman3.1.013. Instruksi Kerja Regenerasi MixbedNur Ali SaidBelum ada peringkat
- Evaporator 3Dokumen31 halamanEvaporator 3Fajar KurniawanBelum ada peringkat
- Laporan KP Franky Michael Pertamina FinalDokumen73 halamanLaporan KP Franky Michael Pertamina Finalsisco butarBelum ada peringkat
- Tabel Nilai NP Pada Resiko Produsen 0.05 Dan Resiko Konsumen 0.1Dokumen1 halamanTabel Nilai NP Pada Resiko Produsen 0.05 Dan Resiko Konsumen 0.1Alfian BaharudinBelum ada peringkat
- (123doc - VN) Pra Rancangan Pabrik Pembuatan High Impact Polystyrene Dengan Proses Bulk Continuous Kapasitas Produksi 22 000 Ton TahunDokumen240 halaman(123doc - VN) Pra Rancangan Pabrik Pembuatan High Impact Polystyrene Dengan Proses Bulk Continuous Kapasitas Produksi 22 000 Ton TahundhikaBelum ada peringkat
- WBSDokumen2 halamanWBScosmasBelum ada peringkat
- Laporan Praktikum IP Kalibrasi Control ValveDokumen6 halamanLaporan Praktikum IP Kalibrasi Control ValveRosyidah KhoirunnisaBelum ada peringkat
- KAPSELDokumen82 halamanKAPSELWillyMuhammadHalimBelum ada peringkat
- Flu PreparationDokumen9 halamanFlu PreparationAudhinna ZuffyBelum ada peringkat
- 03 - Penyiapan Bahan Baku Produksi AlF3Dokumen23 halaman03 - Penyiapan Bahan Baku Produksi AlF3NandaBelum ada peringkat
- Pertemuan 1Dokumen15 halamanPertemuan 1Naufal ZharfanBelum ada peringkat
- 7 Kinetika-Reaksi-Homogen-Alir Dy PPT PDFDokumen7 halaman7 Kinetika-Reaksi-Homogen-Alir Dy PPT PDFLolzBelum ada peringkat
- Uji FfaDokumen4 halamanUji FfaMelika Sopiana SimbolonBelum ada peringkat
- Sistem.... k3 PT - EomDokumen40 halamanSistem.... k3 PT - EomBenn Prasetyo Handynata0% (1)
- Bab II Seleksi Dan Uraian Proses FixDokumen36 halamanBab II Seleksi Dan Uraian Proses FixFitria PutriBelum ada peringkat
- PPTKDokumen16 halamanPPTKKwangbee HyewonBelum ada peringkat
- PPK Aplikasi Reaktor Fixed Bed Multitube Pembuatan ETBEDokumen18 halamanPPK Aplikasi Reaktor Fixed Bed Multitube Pembuatan ETBEAyu NurvitaBelum ada peringkat
- Pra Desain Pabrik "Liquefied Natural Gas Dari Gas Alam"Dokumen8 halamanPra Desain Pabrik "Liquefied Natural Gas Dari Gas Alam"Maulana Dzaki MunawarBelum ada peringkat
- Laporan Praktikum MekanikDokumen2 halamanLaporan Praktikum MekanikANGGA HUTRI SAPUTROBelum ada peringkat
- Rencana Pembelajaran Semester Teknik Reaksi Kimia Ii TKT-3404Dokumen7 halamanRencana Pembelajaran Semester Teknik Reaksi Kimia Ii TKT-3404AreIf Cron BmxStreetBelum ada peringkat
- 9 - II - 6 Dan 7 - Fixed Bed Catalytic Reactor - Genap 2020-2021Dokumen29 halaman9 - II - 6 Dan 7 - Fixed Bed Catalytic Reactor - Genap 2020-2021larasBelum ada peringkat
- UTS Dasar Rekayasa BioprosesDokumen6 halamanUTS Dasar Rekayasa BioprosesSyaiful RizalBelum ada peringkat
- Hidrodinamika Reaktor p0Dokumen34 halamanHidrodinamika Reaktor p0WahyuSatyoTriadiBelum ada peringkat
- Raju Pratama 03031181520108 Termodynamics Solution Chapter 3Dokumen86 halamanRaju Pratama 03031181520108 Termodynamics Solution Chapter 3Afif ZenaBelum ada peringkat
- Bank Soal Uas Semester 5 Tekkim PDFDokumen33 halamanBank Soal Uas Semester 5 Tekkim PDFMUHAMAD YULIANTOBelum ada peringkat
- GMP Transportasi Ikan SegarDokumen6 halamanGMP Transportasi Ikan SegarGamaliel TanakaBelum ada peringkat
- Laporan KP ApicalDokumen100 halamanLaporan KP ApicalDo bluessBelum ada peringkat
- Sifat Kimia Polimer Dan Monomer Dari PVCDokumen3 halamanSifat Kimia Polimer Dan Monomer Dari PVCWandiBelum ada peringkat
- Ethyl Acryate Chapter 1 12 Maret 2017Dokumen25 halamanEthyl Acryate Chapter 1 12 Maret 2017Abdullah Abdul100% (2)
- Laporan Mki LengkapDokumen125 halamanLaporan Mki LengkapYongki Adi Pratama PutraBelum ada peringkat
- Laporan Kerja PraktekDokumen38 halamanLaporan Kerja Praktekrahmat hartonoBelum ada peringkat
- Yesi Novitasari I 0507015Dokumen149 halamanYesi Novitasari I 0507015latifBelum ada peringkat
- Eco Industri Kel. 9Dokumen16 halamanEco Industri Kel. 9Punqahh0% (1)
- Pengendalian Proses - 9Dokumen46 halamanPengendalian Proses - 9Zulfansyah MuchtarBelum ada peringkat
- Pengolahan Data Sirkuit FluidaDokumen10 halamanPengolahan Data Sirkuit Fluidaanon_323902404Belum ada peringkat
- Crump WeirDokumen13 halamanCrump Weiradrianne daweBelum ada peringkat
- (Advances in Industrial Control) Antonio Visioli - Practical Pid Control-Springer (2006) - 161-320Dokumen160 halaman(Advances in Industrial Control) Antonio Visioli - Practical Pid Control-Springer (2006) - 161-320Muhammad Rasyid FauzanBelum ada peringkat
- Crump WeirDokumen11 halamanCrump Weiradrianne daweBelum ada peringkat
- K3 Lab. KF Mata Kuliah Termodinamika Teknik Kimia IDokumen33 halamanK3 Lab. KF Mata Kuliah Termodinamika Teknik Kimia ILaboratorium Kimia Fisika Teknik Kimia USUBelum ada peringkat
- Proposal Ocean BlueDokumen7 halamanProposal Ocean BlueLaboratorium Kimia Fisika Teknik Kimia USUBelum ada peringkat
- Jadwal Perkuliahan Semester B Ta 2018Dokumen1 halamanJadwal Perkuliahan Semester B Ta 2018Laboratorium Kimia Fisika Teknik Kimia USUBelum ada peringkat
- Grafik Penentuan Sifat Fisis CairanDokumen3 halamanGrafik Penentuan Sifat Fisis CairanLaboratorium Kimia Fisika Teknik Kimia USUBelum ada peringkat