Anda mungkin juga menyukai
- RKS Pembangunan Talud Dan Perkerasan Jalan Masuk Gedung DiklatDokumen19 halamanRKS Pembangunan Talud Dan Perkerasan Jalan Masuk Gedung DiklatMuhammad YasinBelum ada peringkat
- Jalan LapenDokumen43 halamanJalan LapenZWINGLI MANIPENIBelum ada peringkat
- Lapis Pondasi Aggregat Kelas B 01Dokumen7 halamanLapis Pondasi Aggregat Kelas B 01MUHAMMAD RAIHANANDIBelum ada peringkat
- Evaluasi Kinerja Dan Desain Ulang Simpang Empat Siradj Salman - Pasundan - KS Tubun - KS Tubun Dalam Kota Samarinda-1Dokumen16 halamanEvaluasi Kinerja Dan Desain Ulang Simpang Empat Siradj Salman - Pasundan - KS Tubun - KS Tubun Dalam Kota Samarinda-1Eka Trisna SuyudiBelum ada peringkat
- RKS Bank SampahDokumen27 halamanRKS Bank SampahElcaryll Pandara100% (1)
- Contoh Proposal LOMBA ASPALDokumen6 halamanContoh Proposal LOMBA ASPALrismaBelum ada peringkat
- Bab 1-Penyelidikan TanahDokumen22 halamanBab 1-Penyelidikan TanahFadlan ADima AdriantaBelum ada peringkat
- Presentasiku Proposal Tugas AkhirDokumen27 halamanPresentasiku Proposal Tugas AkhirMhd KurniawanBelum ada peringkat
- 17 PersimpanganDokumen72 halaman17 PersimpanganRudi RifqaBelum ada peringkat
- 10.pemeriksaan JML Agrt Kasar Berbidang Pecah - Angularitas Agrt KSRDokumen7 halaman10.pemeriksaan JML Agrt Kasar Berbidang Pecah - Angularitas Agrt KSRismailBelum ada peringkat
- Justifikasi Teknis Dintor - KoreksiDokumen7 halamanJustifikasi Teknis Dintor - KoreksiPaul RahmatBelum ada peringkat
- Kriteria Desain PerkerasanDokumen7 halamanKriteria Desain PerkerasanMochamad Ishaq IskandarBelum ada peringkat
- 2016 - SI 3242 - w5. Reologi AspalDokumen11 halaman2016 - SI 3242 - w5. Reologi AspalAldi GunawanBelum ada peringkat
- 15c. Contoh Perhitungan Kaku Bina MargaDokumen44 halaman15c. Contoh Perhitungan Kaku Bina Marga1 MRK411 Maulidiya Meisya PutriBelum ada peringkat
- Urutan Pekerjaan JalanDokumen4 halamanUrutan Pekerjaan Jalanvicky saputraBelum ada peringkat
- AngularitasDokumen6 halamanAngularitasGitaBelum ada peringkat
- Tugas 1 Makalah Survei KecepatanDokumen7 halamanTugas 1 Makalah Survei KecepatanSyarif gapensiBelum ada peringkat
- Tinjauan LPADokumen4 halamanTinjauan LPARizki MaulanaBelum ada peringkat
- Spek Umum Bina Marga Divisi 2 - Spek 2010 Rev 3Dokumen26 halamanSpek Umum Bina Marga Divisi 2 - Spek 2010 Rev 3samrandaBelum ada peringkat
- Republik Indonesia: Kementerian Pekerjaan Umum Dan Perumahan Rakyat Direktorat Jenderal Bina MargaDokumen10 halamanRepublik Indonesia: Kementerian Pekerjaan Umum Dan Perumahan Rakyat Direktorat Jenderal Bina MargaAndre KhalfiBelum ada peringkat
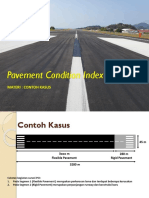
- Contoh Kasus PCIDokumen38 halamanContoh Kasus PCICheper Pria RantasaBelum ada peringkat
- Identifikasi Kebutuhan Data Perencanaan Perkerasan JalanDokumen3 halamanIdentifikasi Kebutuhan Data Perencanaan Perkerasan Jalantoyo sutoyoBelum ada peringkat
- SIMULASI SURVEI - MetodeDokumen48 halamanSIMULASI SURVEI - Metodenicko pratamaBelum ada peringkat
- KAK Pengawasan TeknisPenanganan Longsoran Ruas Jalan Muara DuaKota BatuBts Prov LampungDokumen12 halamanKAK Pengawasan TeknisPenanganan Longsoran Ruas Jalan Muara DuaKota BatuBts Prov LampungMaestro AstadipatiBelum ada peringkat
- Data TUGAS BESAR Perancangan Struktur Beton BertulangDokumen3 halamanData TUGAS BESAR Perancangan Struktur Beton BertulangRosaBelum ada peringkat
- Spesifikasi Jalan Tol (Timbunan Biasa)Dokumen2 halamanSpesifikasi Jalan Tol (Timbunan Biasa)Antix ofart50% (2)
- Perkerasan JalanDokumen20 halamanPerkerasan JalanYusril HidayatBelum ada peringkat
- DedDokumen2 halamanDedDoli SuhendraBelum ada peringkat
- Pengendalian Mutu Pekerjaan BetonDokumen15 halamanPengendalian Mutu Pekerjaan BetonEkaPutraDipraja100% (1)
- Data Perencanaan Jalan TolDokumen2 halamanData Perencanaan Jalan TolMunig Wahyu HartawatiBelum ada peringkat
- Disain Perkerasan Lentur Dan KakuDokumen24 halamanDisain Perkerasan Lentur Dan KakuAtyatamaBelum ada peringkat
- 1 Perencanaan Sistem Drainase Jalan Revised 15 April 2012Dokumen82 halaman1 Perencanaan Sistem Drainase Jalan Revised 15 April 2012prian danyBelum ada peringkat
- Laporan 1 Project Work II Kons. Jalan RayaDokumen245 halamanLaporan 1 Project Work II Kons. Jalan RayaGrace Dana AyoriBelum ada peringkat
- Salinan Terjemahan Designation - C125 - 13a - Standard - TerminologDokumen9 halamanSalinan Terjemahan Designation - C125 - 13a - Standard - TerminologANISAH KHUSNUL KHOTIMAHBelum ada peringkat
- Tambahan Tentang JalanDokumen42 halamanTambahan Tentang JalantiaraBelum ada peringkat
- Bab. 4 - Kriteria Desain Perkerasan - DBDokumen3 halamanBab. 4 - Kriteria Desain Perkerasan - DBDady RiadiBelum ada peringkat
- Deviasi StandarDokumen27 halamanDeviasi StandarsondyBelum ada peringkat
- Perkerasan Jalan PDFDokumen36 halamanPerkerasan Jalan PDFOriginBelum ada peringkat
- LAPORAN ADVIS TEKNIS AUDIT JEMBATAN KRITIS NATUNA KEPULAUAN RIAU 2018 - Rev2Dokumen59 halamanLAPORAN ADVIS TEKNIS AUDIT JEMBATAN KRITIS NATUNA KEPULAUAN RIAU 2018 - Rev2Ghita Claresta SuksmahadiBelum ada peringkat
- SPESIFIKASI Talud PosoDokumen6 halamanSPESIFIKASI Talud PososidiqBelum ada peringkat
- Panduan Teknis Pembangunan Gedung Sekolah 2017Dokumen156 halamanPanduan Teknis Pembangunan Gedung Sekolah 2017Hari FebriBelum ada peringkat
- Rujukan PengujianDokumen4 halamanRujukan PengujianRizky RamadhanBelum ada peringkat
- 1 SMDokumen20 halaman1 SMTabita NataliaBelum ada peringkat
- Flexible and Rigid PavementDokumen18 halamanFlexible and Rigid PavementRahli DarmawanBelum ada peringkat
- Cara Memindahkan Data Tracking Dari Gps Ke Easy Gps Dan AutocadDokumen1 halamanCara Memindahkan Data Tracking Dari Gps Ke Easy Gps Dan AutocadKuswantoBelum ada peringkat
- Artikel Analisis Perhitungan Tebal OverlayDokumen11 halamanArtikel Analisis Perhitungan Tebal OverlayRizky WahyuBelum ada peringkat
- Spesifikasi Teknik Perbaikan JalanDokumen5 halamanSpesifikasi Teknik Perbaikan JalanBihana SyamsulBelum ada peringkat
- Pengujian AspalDokumen12 halamanPengujian AspalMonehoi ZechalyBelum ada peringkat
- "Work Breakdown Structure (WBS) (2) " - Manajemen Konstruksi I - Pertemuan 13Dokumen13 halaman"Work Breakdown Structure (WBS) (2) " - Manajemen Konstruksi I - Pertemuan 13Muhamad Bagus SetiakawanBelum ada peringkat
- ASTM C131 14.en - IdDokumen5 halamanASTM C131 14.en - IdPria Rizky CandraBelum ada peringkat
- Laporan Akhir Pengawasan JalanDokumen30 halamanLaporan Akhir Pengawasan Jalankarina latifahBelum ada peringkat
- CJR Pemodelan Transportasi-DikonversiDokumen23 halamanCJR Pemodelan Transportasi-DikonversiMahzumil AmanyBelum ada peringkat
- 814-File Utama Naskah-1807-1-10-20190628Dokumen13 halaman814-File Utama Naskah-1807-1-10-20190628Dico NasrullohBelum ada peringkat
- 43 Standar+Konstruksi+Jembatan+Tipe+Balok+T+Bentang+Sd+25+M+Untuk+Beban+BM+100Dokumen72 halaman43 Standar+Konstruksi+Jembatan+Tipe+Balok+T+Bentang+Sd+25+M+Untuk+Beban+BM+100allfreepu100% (2)
- Cara Menghitung Volume Tack Coat Dan Prime CoatDokumen8 halamanCara Menghitung Volume Tack Coat Dan Prime Coatsimonperez blessBelum ada peringkat
- Tabel DCP PDFDokumen1 halamanTabel DCP PDFucok taroBelum ada peringkat
- Rekayasa Jalan RayaDokumen85 halamanRekayasa Jalan RayaEri El NiñoBelum ada peringkat
- Rekayasa Jalan RayaDokumen85 halamanRekayasa Jalan RayaDuriat 'rama' SurachmajayaBelum ada peringkat
- Geometrik JalanDokumen84 halamanGeometrik JalanGita AmaliaBelum ada peringkat
- Jurnal Elsa Rati Hariza - Perencanaan Geometrik JalanDokumen16 halamanJurnal Elsa Rati Hariza - Perencanaan Geometrik JalanDwi Sulistyo100% (2)
- Solar SeekerDokumen5 halamanSolar SeekerQoryBelum ada peringkat
- Depok Dalam Angka 2012Dokumen325 halamanDepok Dalam Angka 2012rizkibidsBelum ada peringkat
- Jabar Dalam Angka 2007Dokumen515 halamanJabar Dalam Angka 2007faizals2008Belum ada peringkat
- Dda 2008Dokumen522 halamanDda 2008Dwi SulistyoBelum ada peringkat
- Desain & Perhitungan Break WaterRevDokumen10 halamanDesain & Perhitungan Break WaterRevDwi Sulistyo100% (1)