Anda mungkin juga menyukai
- Laporan Mesin SerempakDokumen21 halamanLaporan Mesin SerempakMuhammad Fauzan Firdaus100% (1)
- AlternatorDokumen10 halamanAlternatordafa_aryaBelum ada peringkat
- Dosen Pengampu: Ir. Mochammad Muqorrobin, M.Eng.: Laporan Praktikum Mata Kuliah Teknik Tenaga Listrik Karakteristik BebanDokumen10 halamanDosen Pengampu: Ir. Mochammad Muqorrobin, M.Eng.: Laporan Praktikum Mata Kuliah Teknik Tenaga Listrik Karakteristik BebanZoeey RoomBelum ada peringkat
- Laporan Praktikum Mata Kuliah Teknik Tenaga Listrik Regulation PerfomanceDokumen11 halamanLaporan Praktikum Mata Kuliah Teknik Tenaga Listrik Regulation PerfomanceZoeey RoomBelum ada peringkat
- Generator Sinkron 3 PhaseDokumen28 halamanGenerator Sinkron 3 PhaseArch ChadafiBelum ada peringkat
- Laporan 2 - No Load and Load Test Generator SinkronDokumen16 halamanLaporan 2 - No Load and Load Test Generator SinkronHanif Khoirul FahmyBelum ada peringkat
- Animasi Yang Kedua Adalah Mengenai Prinsip Kerja Generator ACDokumen10 halamanAnimasi Yang Kedua Adalah Mengenai Prinsip Kerja Generator ACokiharyadiBelum ada peringkat
- Laporan Praktikum Mata Kuliah Teknik Tenaga Listrik Uji Karakteristik Generator Sinkron BerbebanDokumen9 halamanLaporan Praktikum Mata Kuliah Teknik Tenaga Listrik Uji Karakteristik Generator Sinkron BerbebanZoeey RoomBelum ada peringkat
- Laporan Praktikum Teknik Tenaga ListrikDokumen9 halamanLaporan Praktikum Teknik Tenaga ListrikFikar AtsirBelum ada peringkat
- BAB III Motor AsinkronDokumen12 halamanBAB III Motor AsinkronYoshiro KitetsuBelum ada peringkat
- Modul 3 Mesin-Mesin AC DIPERBAIKIDokumen34 halamanModul 3 Mesin-Mesin AC DIPERBAIKIpradino septiyawanBelum ada peringkat
- Motor Listrik 6Dokumen9 halamanMotor Listrik 6Dhea Amelia RianjaniBelum ada peringkat
- Tugas Modul - P1Dokumen4 halamanTugas Modul - P1502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Prinsip Kerja Generator SinkronDokumen28 halamanPrinsip Kerja Generator SinkronEzy Hebrika Syaher100% (1)
- Alternator Tes Load-No LoadDokumen10 halamanAlternator Tes Load-No LoadAgus Bekti RohmadiBelum ada peringkat
- Laporan GS - 5 Impedansi Sinkron Dengan Metode Behn Eschemburg FinalDokumen14 halamanLaporan GS - 5 Impedansi Sinkron Dengan Metode Behn Eschemburg FinalMEILINDA ESTEVANI HUTAGALUNG -Belum ada peringkat
- Laporan Praktikum Winding Resistance MeasurementDokumen12 halamanLaporan Praktikum Winding Resistance MeasurementLaga ErlanggaBelum ada peringkat
- Generator Sinkron 3 FasaDokumen7 halamanGenerator Sinkron 3 FasaFryma ZhafranBelum ada peringkat
- Mesin Listrik 5Dokumen10 halamanMesin Listrik 5Ardy BagusBelum ada peringkat
- Materi 5. Praktik Menentukan Effisiensi Generator Sinkron.-2Dokumen10 halamanMateri 5. Praktik Menentukan Effisiensi Generator Sinkron.-2DILA AGMEL PURBA DILA AGMEL PURBABelum ada peringkat
- Bab IiDokumen11 halamanBab IiRijal SentulBelum ada peringkat
- Prakt. Mesin Listrik PDFDokumen53 halamanPrakt. Mesin Listrik PDFAde Fitsu SaveraBelum ada peringkat
- Generator DCDokumen25 halamanGenerator DCRaja Reski100% (1)
- Laporan Praktikum 2 GeneratorDokumen6 halamanLaporan Praktikum 2 GeneratorMalaindo Lexy Noer TazuddinBelum ada peringkat
- Laporan Praktikum Fisika Modern Penentuan Muatan Spesifik e M Elektron Fisika Fmipa Um PDFDokumen28 halamanLaporan Praktikum Fisika Modern Penentuan Muatan Spesifik e M Elektron Fisika Fmipa Um PDFillaBelum ada peringkat
- Praktik Motor SerempakDokumen11 halamanPraktik Motor Serempakstasaint100% (1)
- Laporan Mesin Ac KLP 5Dokumen13 halamanLaporan Mesin Ac KLP 5erikson_hp100% (2)
- Syahrul Al Rasyid - 21130043 - DC Shunt-1Dokumen8 halamanSyahrul Al Rasyid - 21130043 - DC Shunt-1Ksatria NugrahaBelum ada peringkat
- Laporan Resistansi BelitanDokumen14 halamanLaporan Resistansi BelitanFadli FadliBelum ada peringkat
- Fauzan Dzulfiqar - 191724009 - 3C - TPTL - Laporan Modul 1Dokumen9 halamanFauzan Dzulfiqar - 191724009 - 3C - TPTL - Laporan Modul 13C09FauzanDz -Belum ada peringkat
- Percobaan 1Dokumen9 halamanPercobaan 1rafliferdyshBelum ada peringkat
- Prinsip Kerja Generator SinkronDokumen7 halamanPrinsip Kerja Generator SinkronTeguh Satriya RaharjaBelum ada peringkat
- Generator SinkronDokumen6 halamanGenerator SinkronDesmi AmmeliaBelum ada peringkat
- Rido Fajar Rachmadi - Teklis Pengaturan Kecepatan Motor DCDokumen10 halamanRido Fajar Rachmadi - Teklis Pengaturan Kecepatan Motor DCdimas rido24Belum ada peringkat
- Laporan No Load Test Generator SinkronDokumen11 halamanLaporan No Load Test Generator SinkronDwi Sulistyo UtamaBelum ada peringkat
- Laporan 6 Slip Motor Induksi 3 FasaDokumen5 halamanLaporan 6 Slip Motor Induksi 3 FasaRiski AgustianBelum ada peringkat
- Materi Generator DCDokumen51 halamanMateri Generator DCArya SuhastraBelum ada peringkat
- Laporan GS-6 Karakteristik Luar Dengan Metode Behn Eschemburg-DigabungkanDokumen10 halamanLaporan GS-6 Karakteristik Luar Dengan Metode Behn Eschemburg-DigabungkanMEILINDA ESTEVANI HUTAGALUNG -Belum ada peringkat
- Tegangan HVDC - Rizal Ma'arif - 021800024Dokumen9 halamanTegangan HVDC - Rizal Ma'arif - 021800024Rizal Ma'arifBelum ada peringkat
- Laporan Praktikum Elektronika 5Dokumen17 halamanLaporan Praktikum Elektronika 5Hamdan PrakosoBelum ada peringkat
- ADITYA - 2205052023 - EN-3D - Laprak DC 2 (Seri)Dokumen10 halamanADITYA - 2205052023 - EN-3D - Laprak DC 2 (Seri)AdityaBelum ada peringkat
- Laprak 6 - Vikry Alvi Putra - 21130045Dokumen7 halamanLaprak 6 - Vikry Alvi Putra - 21130045Ksatria NugrahaBelum ada peringkat
- Modul 3Dokumen41 halamanModul 3EDUZAR ZARBelum ada peringkat
- Lap05 Mesin AC Teklis AuditoDokumen13 halamanLap05 Mesin AC Teklis AuditoToditooBelum ada peringkat
- Aditya 2205052023 En-3d Laprak DC 2 (Seri)Dokumen10 halamanAditya 2205052023 En-3d Laprak DC 2 (Seri)Maulana fianda BarawasBelum ada peringkat
- MS3A - Kel 6 - Laporan Praktikum Mesin Listrik Terapan - Load CharacteristicDokumen9 halamanMS3A - Kel 6 - Laporan Praktikum Mesin Listrik Terapan - Load CharacteristicMuhammad Tri AnggoroTeknik MesinBelum ada peringkat
- Generator SinkronDokumen14 halamanGenerator SinkronGusvanBelum ada peringkat
- Laprak 4 - Vikry Alvi Putra - 21130045Dokumen8 halamanLaprak 4 - Vikry Alvi Putra - 21130045Ksatria NugrahaBelum ada peringkat
- Mata Kuliah Dasar Sistem Tenaga ListrikDokumen34 halamanMata Kuliah Dasar Sistem Tenaga ListrikIndra AtmajaBelum ada peringkat
- Rangkaian Ekivalen & Diagram VektorDokumen56 halamanRangkaian Ekivalen & Diagram VektorOktafian Sultan HakimBelum ada peringkat
- Prinsip Kerja Generator SinkronDokumen134 halamanPrinsip Kerja Generator SinkronSultan IbibBelum ada peringkat
- Alternator PDFDokumen31 halamanAlternator PDFnanikBelum ada peringkat
- Azhar 3Dokumen16 halamanAzhar 3aididBelum ada peringkat
- Generator DC Penguat Terpisah (1)Dokumen11 halamanGenerator DC Penguat Terpisah (1)Wulan NursyifaBelum ada peringkat
- Generator DC Berbeban Tanpa PengaturanDokumen8 halamanGenerator DC Berbeban Tanpa PengaturanNova ManihurukBelum ada peringkat
- Uts Praktek Mesin - Alfi SyahrinDokumen6 halamanUts Praktek Mesin - Alfi SyahrinAlfi SyahrinBelum ada peringkat
- Generator AcDokumen22 halamanGenerator Acsely kusuma aBelum ada peringkat
- I. Generator SinkronDokumen96 halamanI. Generator SinkronPutra EmbengBelum ada peringkat
- BAB II GandaDokumen46 halamanBAB II GandaGanda CorynugrohoBelum ada peringkat
- Laporan TA - Almira Permatasari - Last RiviewDokumen137 halamanLaporan TA - Almira Permatasari - Last RiviewArna ZulvanBelum ada peringkat
- KH Ibrahim 15 - Te - Al Hilal Ichlasul AminDokumen4 halamanKH Ibrahim 15 - Te - Al Hilal Ichlasul AminArna ZulvanBelum ada peringkat
- Digital - 20302458-T30642 - Analisis EfektivitasDokumen159 halamanDigital - 20302458-T30642 - Analisis EfektivitasArna ZulvanBelum ada peringkat
- Perda No. 3-2018Dokumen21 halamanPerda No. 3-2018Arna ZulvanBelum ada peringkat
- Digital - 20302458-T30642 - Analisis EfektivitasDokumen159 halamanDigital - 20302458-T30642 - Analisis EfektivitasArna ZulvanBelum ada peringkat
- Daftar PustakaDokumen2 halamanDaftar PustakaArna ZulvanBelum ada peringkat
- 2006-09-Riksa Uji Lift Dan EskalatorDokumen80 halaman2006-09-Riksa Uji Lift Dan EskalatorMaykel RahimBelum ada peringkat
- Gangguan Satu Fasa Ke TanahDokumen7 halamanGangguan Satu Fasa Ke TanahNanu Prasetyo ApriliantoBelum ada peringkat
- Daftar Pustaka Muhammad Asrin Jazuli (7133220043)Dokumen3 halamanDaftar Pustaka Muhammad Asrin Jazuli (7133220043)Arna ZulvanBelum ada peringkat
- 1260 2957 1 PB PDFDokumen7 halaman1260 2957 1 PB PDFArna ZulvanBelum ada peringkat
- Grafik Hub AnginDokumen2 halamanGrafik Hub AnginArna ZulvanBelum ada peringkat
- Jurnal TransmisiDokumen6 halamanJurnal Transmisiriski wahyu agungBelum ada peringkat
- Daftar PustakaDokumen3 halamanDaftar PustakaArna ZulvanBelum ada peringkat
- Makalah GeneratorDokumen19 halamanMakalah GeneratorArna ZulvanBelum ada peringkat
- Daftar PustakaDokumen3 halamanDaftar PustakaArna ZulvanBelum ada peringkat
- 13.30.0011 Crescentia Novia Hapsari DAFTAR PUSTAKADokumen1 halaman13.30.0011 Crescentia Novia Hapsari DAFTAR PUSTAKAArna ZulvanBelum ada peringkat
- Indra Yogi Setiadi 11501244012 PDFDokumen174 halamanIndra Yogi Setiadi 11501244012 PDFArna ZulvanBelum ada peringkat
- Muhammad Anis Preview PDFDokumen18 halamanMuhammad Anis Preview PDFedison panduwalBelum ada peringkat
- Matematika DiskritDokumen16 halamanMatematika DiskritDodi Muhammad ZairBelum ada peringkat
- Makalah Generator DCDokumen16 halamanMakalah Generator DCArna ZulvanBelum ada peringkat
- Job1 GeneratorDokumen12 halamanJob1 GeneratorAzHar HrBelum ada peringkat
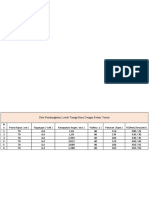
- Data Pembangkitan Listrik Tenaga Bayu Tanpa Beban VariasiDokumen1 halamanData Pembangkitan Listrik Tenaga Bayu Tanpa Beban VariasiArna ZulvanBelum ada peringkat
- Proposal Skripsi PDFDokumen75 halamanProposal Skripsi PDFDiah Ayu OctavianiBelum ada peringkat
- Proposal Skripsi PDFDokumen75 halamanProposal Skripsi PDFDiah Ayu OctavianiBelum ada peringkat
- Grafik Hub AnginDokumen2 halamanGrafik Hub AnginArna ZulvanBelum ada peringkat
- Job1 GeneratorDokumen12 halamanJob1 GeneratorAzHar HrBelum ada peringkat
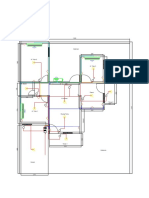
- Gambar Type 60-Model PDFDokumen1 halamanGambar Type 60-Model PDFArna ZulvanBelum ada peringkat
- Data Pembangkitan Listrik Tenaga Bayu Tanpa Beban VariasiDokumen1 halamanData Pembangkitan Listrik Tenaga Bayu Tanpa Beban VariasiArna ZulvanBelum ada peringkat
- Kewirausahaan MagangDokumen5 halamanKewirausahaan MagangArna ZulvanBelum ada peringkat