Anda mungkin juga menyukai
- Braking System CN235Dokumen5 halamanBraking System CN235Hajar Dwi CahyoBelum ada peringkat
- Airworthiness Certification - Emergency Locator Transmitter (ELT)Dokumen63 halamanAirworthiness Certification - Emergency Locator Transmitter (ELT)JBS100% (1)
- Laporan Kerja Praktek LapanganDokumen42 halamanLaporan Kerja Praktek LapanganMuhammad Wafiq Azzis100% (1)
- Laporan PKLDokumen22 halamanLaporan PKLNabil SendesBelum ada peringkat
- CASRDokumen9 halamanCASRqatrunnada balqisBelum ada peringkat
- SERTIFIKASI SIMULATORDokumen11 halamanSERTIFIKASI SIMULATORIswahyudi AprilyastonoBelum ada peringkat
- VOR, DME, dan ILS untuk PenerbanganDokumen24 halamanVOR, DME, dan ILS untuk PenerbanganAmiral GaleBelum ada peringkat
- Aircraft system functionsDokumen3 halamanAircraft system functionsEfrata TariganBelum ada peringkat
- Tugas 2 Kelompok PrintDokumen23 halamanTugas 2 Kelompok PrintGita Marina AhadyantiBelum ada peringkat
- LAPORAN PKL KELOMPOK 2 Yuk SemangatDokumen13 halamanLAPORAN PKL KELOMPOK 2 Yuk SemangatShinta Budi PratiwiBelum ada peringkat
- Tugas Besar AE 4060 Kelaikan Udara - Sabuk PengamanDokumen44 halamanTugas Besar AE 4060 Kelaikan Udara - Sabuk PengamanRd13611019Belum ada peringkat
- Makalah - Kelompok 2Dokumen45 halamanMakalah - Kelompok 2adrianrizkikhairulBelum ada peringkat
- 27-08-2015 Weight & Balance Pertemuan 4Dokumen47 halaman27-08-2015 Weight & Balance Pertemuan 4Roni Al Habsy100% (1)
- ARINCDokumen5 halamanARINCyunayBelum ada peringkat
- Struktur Kurikulum 14-15Dokumen51 halamanStruktur Kurikulum 14-15Wahid100% (1)
- Aircraft RiggingDokumen16 halamanAircraft RiggingRangga Afif JuniarBelum ada peringkat
- Control SystemDokumen59 halamanControl SystemWahyudi AjhaBelum ada peringkat
- Studi Pelaksanaan Lubricate Part On Aileron Pesawat Boeing 737-800 NGDokumen42 halamanStudi Pelaksanaan Lubricate Part On Aileron Pesawat Boeing 737-800 NGDewa BaskaraBelum ada peringkat
- Perawatan Pesawat - Aeroblog PDFDokumen5 halamanPerawatan Pesawat - Aeroblog PDFbangkitBelum ada peringkat
- BAB I-V Tugas AkhirDokumen29 halamanBAB I-V Tugas AkhirAndri KusworoBelum ada peringkat
- Revisi 1 Yudha Misi Okia (18060057) Bab 1 - Bab 3 Laporn KPDokumen40 halamanRevisi 1 Yudha Misi Okia (18060057) Bab 1 - Bab 3 Laporn KPYudha Misi OkiaBelum ada peringkat
- Jenis Mesin Pesawat TerbangDokumen3 halamanJenis Mesin Pesawat TerbangRissa Deshanty100% (1)
- ANALISIS PENGARUH WINGTIP DAN WINGLET TERHADAP SAYAP PESAWAT N2XXDokumen2 halamanANALISIS PENGARUH WINGTIP DAN WINGLET TERHADAP SAYAP PESAWAT N2XXTriawan RamadhanBelum ada peringkat
- VACUUM WASTE SYSTEMDokumen27 halamanVACUUM WASTE SYSTEMRochman Budi PatriyoBelum ada peringkat
- Hubungan Bahasa Dengan Sistematika BerpikirDokumen17 halamanHubungan Bahasa Dengan Sistematika BerpikirLiza100% (1)
- Bab II Profil Umum Balai Kalibrasi Fasilitas Penerbangan (BKFP) 2.1. Latar Belakang Balai Kalibrasi Fasilitas Penerbangan (BFKP)Dokumen25 halamanBab II Profil Umum Balai Kalibrasi Fasilitas Penerbangan (BKFP) 2.1. Latar Belakang Balai Kalibrasi Fasilitas Penerbangan (BFKP)AkbarNugratama100% (1)
- Bab IiDokumen5 halamanBab IiAriefBelum ada peringkat
- Diktat AE3231 Bab1Dokumen10 halamanDiktat AE3231 Bab1HermanManruBelum ada peringkat
- Masalah IcingDokumen6 halamanMasalah IcingRizky Azizul AfniBelum ada peringkat
- CN 235Dokumen3 halamanCN 235Hilda Puspa MardikaBelum ada peringkat
- Aviation FinanceDokumen14 halamanAviation Financeroyflo2009Belum ada peringkat
- Bab I PendahuluanDokumen7 halamanBab I PendahuluanWahyudi Ajha100% (1)
- Bab 1 Aircraft EngineDokumen205 halamanBab 1 Aircraft EngineAtengBelum ada peringkat
- PROSES MANUFAKTUR DASAR: PENITIKDokumen1 halamanPROSES MANUFAKTUR DASAR: PENITIKEko Ari WibowoBelum ada peringkat
- Ac System Kelas 2Dokumen8 halamanAc System Kelas 2john kevin ssBelum ada peringkat
- Alat Penentu Lokasi Pada Saat Emergency (Emergency Locator Transmitter)Dokumen38 halamanAlat Penentu Lokasi Pada Saat Emergency (Emergency Locator Transmitter)Lalu Giat AjahBelum ada peringkat
- Sayap Pesawat dan StrukturnyaDokumen173 halamanSayap Pesawat dan StrukturnyaDian SaputraBelum ada peringkat
- GMF ProfilDokumen39 halamanGMF ProfilTaufiq ByomantoroBelum ada peringkat
- PERAWATAN PESAWAT UDARA (TPU Kelas X)Dokumen26 halamanPERAWATAN PESAWAT UDARA (TPU Kelas X)Eriko Bakti PerkasaBelum ada peringkat
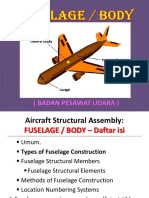
- FUSELAGE_RANGKADokumen185 halamanFUSELAGE_RANGKAAndhika Prahasta DjayaBelum ada peringkat
- Mengapa Sumber Listrik AC Pada Pesawat Terbang 115vac 400 HZ 3phaseDokumen3 halamanMengapa Sumber Listrik AC Pada Pesawat Terbang 115vac 400 HZ 3phaseselseliiBelum ada peringkat
- Rancang Bangun Kontrol Gerbang Tol Elektronik Via Bluetooth Berbasis Arduino Dan AndroidDokumen60 halamanRancang Bangun Kontrol Gerbang Tol Elektronik Via Bluetooth Berbasis Arduino Dan AndroidBoy PanjaitanBelum ada peringkat
- Makalah Maintenance Practice Air Marshalling PDF FreeDokumen5 halamanMakalah Maintenance Practice Air Marshalling PDF FreeAl FajrBelum ada peringkat
- Cara Memperbaiki Kipas Angin Air Cooler Yang MatiDokumen2 halamanCara Memperbaiki Kipas Angin Air Cooler Yang MatiZainal Arifin BG100% (4)
- F-16 Block 30 SpesifikasiDokumen10 halamanF-16 Block 30 SpesifikasiakmalBelum ada peringkat
- Sertifikasi Cockpit Voice RecorderDokumen47 halamanSertifikasi Cockpit Voice RecorderRais FadillahBelum ada peringkat
- Bab 1 - Bab 5 Tugas Akhir Reza Dian Pangestu.sDokumen40 halamanBab 1 - Bab 5 Tugas Akhir Reza Dian Pangestu.sreza dianBelum ada peringkat
- SISTEM HIDRAULIK PESAWAT ATR-72Dokumen42 halamanSISTEM HIDRAULIK PESAWAT ATR-72AIXXIX KNTRBelum ada peringkat
- Rancang Bangun Elevon Portable Flying Wing - Metode PenelitianDokumen20 halamanRancang Bangun Elevon Portable Flying Wing - Metode PenelitianDarmawan HanifBelum ada peringkat
- KAMBINGDokumen45 halamanKAMBINGJajangBelum ada peringkat
- LOCKING DEVICESDokumen14 halamanLOCKING DEVICESaldy priyoBelum ada peringkat
- Tugas Akhir Bab 1-5Dokumen45 halamanTugas Akhir Bab 1-5Afif Nur SolehBelum ada peringkat
- Oil Temperature IndicatorDokumen5 halamanOil Temperature IndicatorTegar VirgaBelum ada peringkat
- FMC-PMDGDokumen19 halamanFMC-PMDGsatyaamyghaBelum ada peringkat
- Automatic Flight Control SystemDokumen9 halamanAutomatic Flight Control SystemFajarKomara0% (1)
- Muhammad Agun Bahari (16013046), Teknik Aeronautika.Dokumen43 halamanMuhammad Agun Bahari (16013046), Teknik Aeronautika.Dyka Nugraha100% (1)
- Studi Kasus Aileron Servo Control Pesawat Airbus 330-300Dokumen43 halamanStudi Kasus Aileron Servo Control Pesawat Airbus 330-300Dyka NugrahaBelum ada peringkat
- JTD - 4D - Kelompok 2 - Makalah Fly by WireDokumen11 halamanJTD - 4D - Kelompok 2 - Makalah Fly by WireBudiSetiawanBelum ada peringkat
- JTD - 4D - Kelompok 2 - Makalah Fly by WireDokumen11 halamanJTD - 4D - Kelompok 2 - Makalah Fly by WireJTD 4D - Kelfin Agung Satriawan - 08Belum ada peringkat
- Modul AC. Instrument System 1-4 (New)Dokumen79 halamanModul AC. Instrument System 1-4 (New)Sri WahyuniBelum ada peringkat