Anda mungkin juga menyukai
- Pemakaian Motor ListrikDokumen22 halamanPemakaian Motor ListrikLeandro WindessyBelum ada peringkat
- Bab IV Motor ListrikDokumen6 halamanBab IV Motor ListrikVarel FarhanBelum ada peringkat
- Bab Iii - TTLDokumen22 halamanBab Iii - TTLSEKARARUM ADIANITA PUTRIBelum ada peringkat
- TTL Bab 4Dokumen10 halamanTTL Bab 4Sekartika SariBelum ada peringkat
- Mesin Arus Searah (P2)Dokumen60 halamanMesin Arus Searah (P2)Oktorio SiagianBelum ada peringkat
- Generator Arus SearahDokumen61 halamanGenerator Arus SearahYeyensi mayang sariBelum ada peringkat
- Aaaranagkaian Arus Bolak BalikDokumen54 halamanAaaranagkaian Arus Bolak BalikJaime Luis da CostaBelum ada peringkat
- Bab I Azas Gen&motDokumen37 halamanBab I Azas Gen&motHakam RahmatullahBelum ada peringkat
- Materi Bab 3Dokumen26 halamanMateri Bab 3Ahmad MuzhaffarBelum ada peringkat
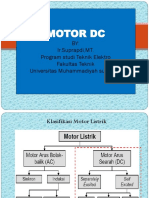
- Motor DCDokumen19 halamanMotor DCsyifaBelum ada peringkat
- Motor DCDokumen73 halamanMotor DCMycle Rondonuwu100% (1)
- LAPORAN SEMENTARA UNIT 4 NdaruDokumen10 halamanLAPORAN SEMENTARA UNIT 4 NdaruWafi NeotechBelum ada peringkat
- Percobaan 1 Menjalankan Motor DCDokumen8 halamanPercobaan 1 Menjalankan Motor DCsamuel kurniawanBelum ada peringkat
- Dasar-Dasar Konversi EnergiDokumen27 halamanDasar-Dasar Konversi EnergiEfira Dwi RahmawatiBelum ada peringkat
- Generator Arus SearahDokumen58 halamanGenerator Arus SearahFadillah Jamil40% (5)
- Pertemuan 8. Klasifikasi Mesin-Mesin Listrik Dan Mesin-Mesin Arus SearahDokumen20 halamanPertemuan 8. Klasifikasi Mesin-Mesin Listrik Dan Mesin-Mesin Arus Searahekiprasetyo002Belum ada peringkat
- BAB 2 Motor DCDokumen26 halamanBAB 2 Motor DCArian Epani100% (1)
- Laporan Sementara Unit 4Dokumen10 halamanLaporan Sementara Unit 4Wafi NeotechBelum ada peringkat
- Tugas MML-2 (Sri Menda Sembiring)Dokumen9 halamanTugas MML-2 (Sri Menda Sembiring)Sri Mendha SembiringBelum ada peringkat
- Arus Bolak BalikDokumen9 halamanArus Bolak BalikahmadBelum ada peringkat
- Materi Bab 6Dokumen12 halamanMateri Bab 6Ahmad MuzhaffarBelum ada peringkat
- MOTOR DC (Materi)Dokumen31 halamanMOTOR DC (Materi)Faqih DwiBelum ada peringkat
- Laporan Sementara Unit 3 Sebelum PraktikumDokumen8 halamanLaporan Sementara Unit 3 Sebelum PraktikumWafi NeotechBelum ada peringkat
- Arus Bolak BalikDokumen17 halamanArus Bolak BalikAprillia Cahaya HawiniBelum ada peringkat
- Timbulnya Tegangan BolakDokumen9 halamanTimbulnya Tegangan BolakM.fakhrur raziBelum ada peringkat
- Bahan Ajar Faktor DayaDokumen7 halamanBahan Ajar Faktor DayaNisrina RhiiNnaBelum ada peringkat
- Bab IV-mesin Arus Searah-A.simanjuntakDokumen23 halamanBab IV-mesin Arus Searah-A.simanjuntakla zekiBelum ada peringkat
- Makalah Fisika Gaya LorentzDokumen8 halamanMakalah Fisika Gaya LorentzBucariBelum ada peringkat
- Mesin Mesin ListrikDokumen67 halamanMesin Mesin ListrikFelix TampubolonBelum ada peringkat
- Percobaan Generator Sinkron Berbeban Dengan PengaturanDokumen11 halamanPercobaan Generator Sinkron Berbeban Dengan PengaturanEfraim SitorusBelum ada peringkat
- Mesin SinkronDokumen42 halamanMesin SinkronHafil Husein100% (1)
- Alternator Dan Motor SinkronDokumen13 halamanAlternator Dan Motor SinkronBozky CiamikBelum ada peringkat
- Job1 GeneratorDokumen12 halamanJob1 GeneratorAzHar HrBelum ada peringkat
- Arus Bolak Balik Klp. 2Dokumen12 halamanArus Bolak Balik Klp. 2DiniiBelum ada peringkat
- Prinsip Kerja Motor Arus SearahDokumen14 halamanPrinsip Kerja Motor Arus SearahFirmansyah PutraBelum ada peringkat
- Teknik Tenaga Listrik Pertemuan 3 - Hasrul Baki HsDokumen28 halamanTeknik Tenaga Listrik Pertemuan 3 - Hasrul Baki HsHasrul Baki HasibuanBelum ada peringkat
- Makalah MOTOR DCDokumen19 halamanMakalah MOTOR DCwahyuadi148Belum ada peringkat
- Menjalankan Motor DCDokumen8 halamanMenjalankan Motor DCHamdan K. Nugroho100% (1)
- Generator Arus SearahDokumen15 halamanGenerator Arus Searahrusdi ariawan50% (2)
- E. Rangkaian Arus Bolak BalikDokumen4 halamanE. Rangkaian Arus Bolak BalikJeremia VincensiusBelum ada peringkat
- Motor DCDokumen20 halamanMotor DCWahyudien Abdul AhhwazBelum ada peringkat
- Teknik Listrik TerapanDokumen36 halamanTeknik Listrik TerapanHARJAR BATANBelum ada peringkat
- Mesin Listrik Mesin Arus SearahDokumen228 halamanMesin Listrik Mesin Arus Searahahmad fauzi0% (1)
- Karuna Fajar Yoga Sakti - Tugas Generator DCDokumen9 halamanKaruna Fajar Yoga Sakti - Tugas Generator DCyoga saktiBelum ada peringkat
- Lapres Percobaan 5Dokumen13 halamanLapres Percobaan 5Dwiky VialpandoBelum ada peringkat
- M2-4 Mesin DCDokumen93 halamanM2-4 Mesin DCFata Aisy Aufa AlanurBelum ada peringkat
- Quiz PPML - Simon Jansen Saragi Sitio - 062001900012Dokumen14 halamanQuiz PPML - Simon Jansen Saragi Sitio - 062001900012Simon Jansen Saragi SitioBelum ada peringkat
- Motor DCDokumen30 halamanMotor DCRaja ReskiBelum ada peringkat
- Faktor Daya Dan Alat Ukur Faktor DayaDokumen5 halamanFaktor Daya Dan Alat Ukur Faktor DayaRahmadaniBelum ada peringkat
- Momen InersiaDokumen13 halamanMomen InersiaharlesBelum ada peringkat
- Pengukuran Torsi Dan Daya PutarDokumen5 halamanPengukuran Torsi Dan Daya PutarNADYABelum ada peringkat
- Pengertian Listrik Statis Dan DinamisDokumen4 halamanPengertian Listrik Statis Dan Dinamismahwa0% (1)
- Josheet 5 PRK Mesin ListrikDokumen6 halamanJosheet 5 PRK Mesin Listrikjonipar elektroBelum ada peringkat
- Teori Listrik Terapan Kriteria DesainDokumen12 halamanTeori Listrik Terapan Kriteria DesainSeptian Alif FarhansyahBelum ada peringkat
- Motor DCDokumen40 halamanMotor DCAhmadZakkyBurhanBelum ada peringkat
- Akhmad Khairul AminDokumen19 halamanAkhmad Khairul AminM RaynaldiBelum ada peringkat
- Mesin Arus SearahDokumen38 halamanMesin Arus SearahMuhammad IkhsanBelum ada peringkat
- 3 Konsep DasarDokumen29 halaman3 Konsep DasarArif I YantoBelum ada peringkat
- Genesa BatubaraDokumen7 halamanGenesa BatubaraAhmad MuzhaffarBelum ada peringkat
- Materi Bab 6Dokumen12 halamanMateri Bab 6Ahmad MuzhaffarBelum ada peringkat
- Materi Bab 3Dokumen26 halamanMateri Bab 3Ahmad MuzhaffarBelum ada peringkat
- Program Kerja Osis 2018-2019Dokumen14 halamanProgram Kerja Osis 2018-2019Ahmad MuzhaffarBelum ada peringkat
- Makalah PKNDokumen15 halamanMakalah PKNAhmad MuzhaffarBelum ada peringkat