Anda mungkin juga menyukai
- Analisis swot dalam 4 langkah: Bagaimana menggunakan matriks SWOT untuk membuat perbedaan dalam karir dan bisnisDari EverandAnalisis swot dalam 4 langkah: Bagaimana menggunakan matriks SWOT untuk membuat perbedaan dalam karir dan bisnisPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Rps Mekanika Fluida Dan HidrolikaDokumen6 halamanRps Mekanika Fluida Dan Hidrolikasuputra682Belum ada peringkat
- RPS Matematika Teknik II WordDokumen5 halamanRPS Matematika Teknik II WordMamluatul MufidaBelum ada peringkat
- RPS Mekanika Fluida IDokumen6 halamanRPS Mekanika Fluida IrahmatanggiBelum ada peringkat
- RPS Dasar-Dasar PemrogramanDokumen8 halamanRPS Dasar-Dasar PemrogramanYonaBelum ada peringkat
- Rps Fisika Matematika I KkniDokumen8 halamanRps Fisika Matematika I KkniRussell Ongdrus VocBelum ada peringkat
- RPS-Fisika LingkunganDokumen14 halamanRPS-Fisika LingkunganCut Kandy SafieraBelum ada peringkat
- PDF PDFDokumen43 halamanPDF PDFRachmatBelum ada peringkat
- Elemen Elemen Mesin Dalam Perancangan Mekanis Edisi 4 PDFDokumen266 halamanElemen Elemen Mesin Dalam Perancangan Mekanis Edisi 4 PDFanwarBelum ada peringkat
- FORMAT RPS JUR TMAB - Mekanika Teknik 1Dokumen2 halamanFORMAT RPS JUR TMAB - Mekanika Teknik 1Auliana100% (1)
- RPS Praktek PMSN Lanjut D3 2021Dokumen5 halamanRPS Praktek PMSN Lanjut D3 2021Alexander MarpaungBelum ada peringkat
- Silabus Pemrograman DasarDokumen3 halamanSilabus Pemrograman DasarIisMLailyBelum ada peringkat
- RENCANA PEMBELAJARAN MATA KULIAH Pengolahan Limbah Hasil PerikananDokumen6 halamanRENCANA PEMBELAJARAN MATA KULIAH Pengolahan Limbah Hasil PerikananArif MulyantoBelum ada peringkat
- Belajar Dan Pembelajaran Kelompok-4-Indra Aribowo NazaraDokumen15 halamanBelajar Dan Pembelajaran Kelompok-4-Indra Aribowo NazaraIndra Aribowo NazaraBelum ada peringkat
- RPS FISIKA DASAR 1 REVISI SEPTEMBER 2020 DaringDokumen48 halamanRPS FISIKA DASAR 1 REVISI SEPTEMBER 2020 DaringThunder AnimeBelum ada peringkat
- Format Baru - RPS Fkip Unsulbar - Januari 2022Dokumen10 halamanFormat Baru - RPS Fkip Unsulbar - Januari 2022Muhammad Irfan Drive100% (1)
- RPS Termodinamika II Ganjil 2022Dokumen10 halamanRPS Termodinamika II Ganjil 2022Dyan Hatining Ayu SBelum ada peringkat
- Sap Silabus Jurusan Teknik Mesin Itb Kurikulum 2013 Leak CompleateDokumen151 halamanSap Silabus Jurusan Teknik Mesin Itb Kurikulum 2013 Leak CompleateSyahiir Kamil80% (5)
- RPS Fisika DasarDokumen7 halamanRPS Fisika DasarIwenda Subagio100% (1)
- 3.2. Lambang Unsur Rumus Kimia Dan Persamaan ReaksiDokumen12 halaman3.2. Lambang Unsur Rumus Kimia Dan Persamaan ReaksiFirstca Aulia RachmaBelum ada peringkat
- SAP Fisika Dasar Fahril Abdjan, ST, MTDokumen34 halamanSAP Fisika Dasar Fahril Abdjan, ST, MTfahril abdjanBelum ada peringkat
- Kurikulum-Induk-Informatika ITB PDFDokumen15 halamanKurikulum-Induk-Informatika ITB PDFkhataraBelum ada peringkat
- Renstra Penelitian PNP Periode 2021 - 2024Dokumen105 halamanRenstra Penelitian PNP Periode 2021 - 2024Yuhefizar Ephi LintauBelum ada peringkat
- RPS Elektronika Analog - Mochamad Irwan NariDokumen9 halamanRPS Elektronika Analog - Mochamad Irwan NariDaniel SizanBelum ada peringkat
- Efi 161 RPS Fisika CitraDokumen3 halamanEfi 161 RPS Fisika Citraratna fitriBelum ada peringkat
- RPS ElektrodinamikaDokumen10 halamanRPS ElektrodinamikaGusrianta AntaBelum ada peringkat
- Critical Book Report (CBR) : Kelompok 1Dokumen9 halamanCritical Book Report (CBR) : Kelompok 1Astoni SinambelaBelum ada peringkat
- RPS Fisika Dasar 1 - d3tkDokumen16 halamanRPS Fisika Dasar 1 - d3tkdyan hatining ayu sudarniBelum ada peringkat
- Kartu Soal Uas X Fisika 2013-2014Dokumen25 halamanKartu Soal Uas X Fisika 2013-2014YusmiatyYusufBelum ada peringkat
- Silabus Ekonometrika 1-Gasal 2015-2016 - Final - Ryt PDFDokumen6 halamanSilabus Ekonometrika 1-Gasal 2015-2016 - Final - Ryt PDFDefi Wirdah AmaraBelum ada peringkat
- RPS Fisika Terapan Prodi D3 Teknik MesinDokumen17 halamanRPS Fisika Terapan Prodi D3 Teknik Mesin32-Yasin Nurrohman-BaningBelum ada peringkat
- RPS ANALISIS Kompleks 050821Dokumen5 halamanRPS ANALISIS Kompleks 050821SD IT Al GhaisaniBelum ada peringkat
- Rps Etika Profesi Guru OkDokumen5 halamanRps Etika Profesi Guru OkRice OktaviaBelum ada peringkat
- Prota N Promes XDokumen2 halamanProta N Promes XPufa DjuartonoBelum ada peringkat
- RPS Geologi DasarDokumen4 halamanRPS Geologi Dasarandi_esalBelum ada peringkat
- Ulangan FisikaDokumen16 halamanUlangan FisikaIvanBelum ada peringkat
- Modul Praktikum Fisika Dasar IDokumen138 halamanModul Praktikum Fisika Dasar IDaniel Alfarado100% (1)
- RPS Fisika Dan Teknologi SemikonduktorDokumen6 halamanRPS Fisika Dan Teknologi SemikonduktorWidayanti, S.Si.,M.Si Widayanti, S.Si.,M.SiBelum ada peringkat
- Laporan Akhir Studi Independen A. RamadhanDokumen81 halamanLaporan Akhir Studi Independen A. RamadhanAhmad RamaBelum ada peringkat
- Laporan Praktikum Ilmu LogamDokumen92 halamanLaporan Praktikum Ilmu LogamAlfianBagusEkaPutra100% (1)
- RPS Rangkaian Listrik 1 D3Dokumen6 halamanRPS Rangkaian Listrik 1 D3agungsap2002Belum ada peringkat
- Fis10 Getaran Gelombang Dan Bunyi RevDokumen60 halamanFis10 Getaran Gelombang Dan Bunyi RevTamara KhasimaBelum ada peringkat
- RPS Fisika Dasar - ArisDokumen8 halamanRPS Fisika Dasar - Arisdewi anggrainiBelum ada peringkat
- CJR Fisika TegarDokumen14 halamanCJR Fisika TegarTegar marpaungBelum ada peringkat
- RPS - Geografi Regional PDFDokumen10 halamanRPS - Geografi Regional PDFSatria FitrioBelum ada peringkat
- AK115159 Perilaku OrganisasiDokumen11 halamanAK115159 Perilaku OrganisasiSeptrisnawatyBelum ada peringkat
- RPS Eksperimen SainsDokumen8 halamanRPS Eksperimen SainsAnnisa HakimBelum ada peringkat
- KimiaDokumen130 halamanKimiameitaBelum ada peringkat
- RPS Eksperimen Fisika Klasik FixDokumen6 halamanRPS Eksperimen Fisika Klasik FixFanny Rahmatina Rahim UNPBelum ada peringkat
- RPS Fisika1 TMesinDokumen17 halamanRPS Fisika1 TMesinVicky PratamaBelum ada peringkat
- RPS Otk 1Dokumen5 halamanRPS Otk 1Permana PakpahanBelum ada peringkat
- RPS EVALUASI - NewDokumen13 halamanRPS EVALUASI - NewnapisahBelum ada peringkat
- RPS Fisika KuantumDokumen14 halamanRPS Fisika KuantumAji SaputraBelum ada peringkat
- RPS Mekanika FluidaDokumen5 halamanRPS Mekanika FluidaNurBelum ada peringkat
- RPS Matematika 1Dokumen13 halamanRPS Matematika 1fahrul hidayatBelum ada peringkat
- RPS - Agus Harianto - Mesin Pendingin Dan PemanasDokumen12 halamanRPS - Agus Harianto - Mesin Pendingin Dan PemanasFuad RadjakBelum ada peringkat
- RPS - Marfuad, ST Teknik Pengelasan LogamDokumen12 halamanRPS - Marfuad, ST Teknik Pengelasan LogamFuad RadjakBelum ada peringkat
- RPS Mekanika Fluida Hidrolika 2Dokumen7 halamanRPS Mekanika Fluida Hidrolika 2joyBelum ada peringkat
- Logo Nama Perguruan Tinggi Kode Dokumen: Fakultas Departemen/Jurusan/Program StudiDokumen13 halamanLogo Nama Perguruan Tinggi Kode Dokumen: Fakultas Departemen/Jurusan/Program StudiMiki SupriantoBelum ada peringkat
- RPS BiokimiaDokumen8 halamanRPS BiokimiaLeny FitriahBelum ada peringkat
- Mekanisme Sederhana Kinematika 2021Dokumen9 halamanMekanisme Sederhana Kinematika 2021Muh YidinBelum ada peringkat
- Mekanisme Sederhana Kinematika 1 2020Dokumen11 halamanMekanisme Sederhana Kinematika 1 2020Muh YidinBelum ada peringkat
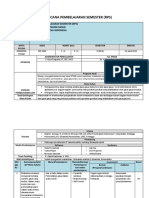
- RPS Rencana Pembelajaran Semester KINEMATIKA 3Dokumen31 halamanRPS Rencana Pembelajaran Semester KINEMATIKA 3Muh YidinBelum ada peringkat
- RPS Kinematika 1Dokumen16 halamanRPS Kinematika 1Muh YidinBelum ada peringkat
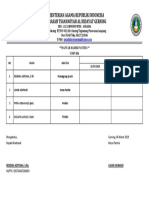
- Daftar Hadir PanitiaDokumen1 halamanDaftar Hadir PanitiaMuh YidinBelum ada peringkat
- Daftar Hadir PanitiaDokumen1 halamanDaftar Hadir PanitiaMuh YidinBelum ada peringkat