Anda mungkin juga menyukai
- DASAR Dinamika KendaraanDokumen6 halamanDASAR Dinamika KendaraanMaulanathan YkBelum ada peringkat
- Analisa Kinerja Sistem Transmisi Pada KendaraanDokumen30 halamanAnalisa Kinerja Sistem Transmisi Pada KendaraanAnggoro BernardiBelum ada peringkat
- Makalah Gaya Dorong Maksimum KendaraanDokumen5 halamanMakalah Gaya Dorong Maksimum KendaraanChicco0% (1)
- P3-2. DINAMIKA Kendaraan Bergerak LurusDokumen16 halamanP3-2. DINAMIKA Kendaraan Bergerak LurusSonix LiangBelum ada peringkat
- Konstruksi KendaraanDokumen81 halamanKonstruksi KendaraanIBrisBelum ada peringkat
- Mekanika Gerak Kendaraan Faiz Nurul Qolbi (182170086)Dokumen11 halamanMekanika Gerak Kendaraan Faiz Nurul Qolbi (182170086)Faiz N QBelum ada peringkat
- 15 LokomotifDokumen23 halaman15 LokomotifNormaNova HutapeaBelum ada peringkat
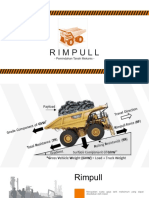
- RimpullDokumen17 halamanRimpullAnisa Rahmawati100% (1)
- 03 - Dasar Dasar TeknisDokumen15 halaman03 - Dasar Dasar TeknisHendra KurniawanBelum ada peringkat
- Materi Stabilitas Gaya Dorong Hambat PD Kendaraan 202 D3 To PKB PKTJ Pertemuan I 29 Maret For Taruna Remaja BDokumen14 halamanMateri Stabilitas Gaya Dorong Hambat PD Kendaraan 202 D3 To PKB PKTJ Pertemuan I 29 Maret For Taruna Remaja BPaturahman RBelum ada peringkat
- Alat - Alat Berat Pertemuan 3Dokumen42 halamanAlat - Alat Berat Pertemuan 3Satrio Sudin SDA JAKUTBelum ada peringkat
- MODUL MGK NewDokumen29 halamanMODUL MGK NewFajar MaulanaBelum ada peringkat
- Perhitungan Produktivitas Alat Berat (Pertemuan 3)Dokumen42 halamanPerhitungan Produktivitas Alat Berat (Pertemuan 3)Rizard LembataBelum ada peringkat
- AGROTEK 06 Gaya Hela Dan Kemampuan TraktorDokumen12 halamanAGROTEK 06 Gaya Hela Dan Kemampuan Traktor11 Faisa Rafi Ramadhan PAIBelum ada peringkat
- Analisis Tenaga Alat BeratDokumen44 halamanAnalisis Tenaga Alat Beratridho maulanaBelum ada peringkat
- Analisis Tenaga Alat BeratDokumen44 halamanAnalisis Tenaga Alat BeratNidal Zuwida0% (2)
- Bahan Handout Kuliah Pengoperasian Traktor Dan Mesin PertanianDokumen52 halamanBahan Handout Kuliah Pengoperasian Traktor Dan Mesin PertanianKaris SyaputraBelum ada peringkat
- KuisDokumen10 halamanKuisWilliam Mikhael PBelum ada peringkat
- Analisis Tenaga Alat BeratDokumen44 halamanAnalisis Tenaga Alat BeratAhmad TegarBelum ada peringkat
- AGROTEK 07 Penyesuaian Beban TraktorDokumen28 halamanAGROTEK 07 Penyesuaian Beban Traktor11 Faisa Rafi Ramadhan PAIBelum ada peringkat
- Produktivitas Alat Berat A. Faktor Yang Mempengaruhi Produktivitas AlatDokumen19 halamanProduktivitas Alat Berat A. Faktor Yang Mempengaruhi Produktivitas Alatsiti kahtijahBelum ada peringkat
- 912 HUSTRULID TRANSLITE Perencanaan Dan Desain Tambang TerbukaDokumen5 halaman912 HUSTRULID TRANSLITE Perencanaan Dan Desain Tambang TerbukaRizal rindawunaBelum ada peringkat
- 1 PBDokumen7 halaman1 PBTMBryan Naufal AlfiansyahBelum ada peringkat
- 12 Perhitungan Rem IIIDokumen7 halaman12 Perhitungan Rem IIITengku Razil KadriBelum ada peringkat
- 2 Analisistenagaalatberat 121124045942 Phpapp02Dokumen43 halaman2 Analisistenagaalatberat 121124045942 Phpapp02Ringgo ReogBelum ada peringkat
- Pertemuan XIII APLIKASI FISIKA UNTUK GAYA SENTRIPETALDokumen10 halamanPertemuan XIII APLIKASI FISIKA UNTUK GAYA SENTRIPETALReinashu YuritBelum ada peringkat
- Makalah KendaraanDokumen6 halamanMakalah KendaraanRizhal A. RahmawanBelum ada peringkat
- Analisa Dinamika Kendaraan Pedesaan WAPRODEKDokumen28 halamanAnalisa Dinamika Kendaraan Pedesaan WAPRODEKRadian FauziaBelum ada peringkat
- RimpullDokumen13 halamanRimpullfathur rahmanBelum ada peringkat
- Faktor - Faktor Yang Mempengaruhi Produksi Alat-AlatDokumen10 halamanFaktor - Faktor Yang Mempengaruhi Produksi Alat-AlatBagus UcupBelum ada peringkat
- Gaya Dorong Dan Gaya Hambat Pada Kendaraan 1Dokumen5 halamanGaya Dorong Dan Gaya Hambat Pada Kendaraan 1Denur -Belum ada peringkat
- Presentasi Kajian LRT PalembangDokumen44 halamanPresentasi Kajian LRT Palembanggokilricky38Belum ada peringkat
- Gaya Traksi KendaraanDokumen3 halamanGaya Traksi KendaraanDenur -Belum ada peringkat
- Bab Vi LokomotifDokumen17 halamanBab Vi LokomotifFauzan Nhar NharBelum ada peringkat
- Running PerformanceDokumen6 halamanRunning PerformanceSanzaya dwi abimanyuBelum ada peringkat
- RimpullDokumen23 halamanRimpullHerza Mitha100% (2)
- Loader Dan Analisa Biaya AlatDokumen8 halamanLoader Dan Analisa Biaya AlatDavina JoanBelum ada peringkat
- Tugas AkhirDokumen49 halamanTugas AkhirIskandar FauziBelum ada peringkat
- Awal Kuliah Geometri Peninggian Rel PDFDokumen7 halamanAwal Kuliah Geometri Peninggian Rel PDFfarisbudiantoBelum ada peringkat
- 2018-10-26 LokomotifDokumen16 halaman2018-10-26 LokomotifMuhammad Baharuddin Yusup SinagaBelum ada peringkat
- Bab III Dasar Teori, Jalan Angkut TambangDokumen23 halamanBab III Dasar Teori, Jalan Angkut TambangAnonymous oT9Lzx450% (2)
- Dasar Dasar KeteknikanDokumen9 halamanDasar Dasar KeteknikanHusnulMahmudiBelum ada peringkat
- Produktivitas Alat Berat RevDokumen27 halamanProduktivitas Alat Berat RevIqbal FandanaBelum ada peringkat
- GradabilityDokumen6 halamanGradabilityWahyu KurniawanBelum ada peringkat
- 1 PBDokumen6 halaman1 PBMiftahFakhriansyahBelum ada peringkat
- 1409 Ais - Database.model - file.PertemuanFileContent Perencanaan Pertemuan 5 Materi Dan Tugas 2Dokumen18 halaman1409 Ais - Database.model - file.PertemuanFileContent Perencanaan Pertemuan 5 Materi Dan Tugas 2Wahyu YogaaBelum ada peringkat
- K 14 15 Bab VII LokomotifDokumen15 halamanK 14 15 Bab VII LokomotifFAZRIL AHSANU AMALABelum ada peringkat
- Gaya Pada Alat BeratDokumen6 halamanGaya Pada Alat BeratPuri AwandaBelum ada peringkat
- Bab Iv GJRDokumen21 halamanBab Iv GJRKrisna YudhaBelum ada peringkat
- Gaya Jejak KendaraanDokumen18 halamanGaya Jejak KendaraanArdi Satriyo PurnomoBelum ada peringkat
- MATERI 12 Contoh Perhitungan Kapasitas Produksi - 2Dokumen12 halamanMATERI 12 Contoh Perhitungan Kapasitas Produksi - 2Amir Al AminBelum ada peringkat
- Biaya Operasi Kendaraan Dan Batas-Batas: Dalam Opersional Suatu Kendaraan Besarnya BOK Secara Umum DibagiDokumen22 halamanBiaya Operasi Kendaraan Dan Batas-Batas: Dalam Opersional Suatu Kendaraan Besarnya BOK Secara Umum DibagiFebriNuryadiWicaksonoBelum ada peringkat
- Gaya Pada Alat Berat (1) OkeDokumen41 halamanGaya Pada Alat Berat (1) Okerangga fernand0Belum ada peringkat
- Karakteristik KendaraanDokumen9 halamanKarakteristik KendaraanDevita MaharaniBelum ada peringkat
- Responsi Belt Conveyor Dan LokomotifDokumen28 halamanResponsi Belt Conveyor Dan Lokomotifjuan yonathanBelum ada peringkat
- Biaya Produksi Dump Truck XDokumen6 halamanBiaya Produksi Dump Truck XRyan UcBelum ada peringkat
- Sesi IiDokumen33 halamanSesi IiIndri KyuBelum ada peringkat