Anda mungkin juga menyukai
- Kelompok 4 - Tugas - Irigasi&Bangunan Air-2Dokumen48 halamanKelompok 4 - Tugas - Irigasi&Bangunan Air-2AletheaBelum ada peringkat
- Bab II Metode Distribusi MomenDokumen28 halamanBab II Metode Distribusi MomenRockabilly San JoseBelum ada peringkat
- Tugas PPT Perkerasan Jalan (Uts) Vicku20.069Dokumen17 halamanTugas PPT Perkerasan Jalan (Uts) Vicku20.069Aldi SaputraBelum ada peringkat
- ANALISIS DINAMIKA STRUKTURDokumen40 halamanANALISIS DINAMIKA STRUKTUREngky WrgBelum ada peringkat
- jsksks15008083 Immanuel Hepma Sihol MardameDokumen6 halamanjsksks15008083 Immanuel Hepma Sihol MardamelorenzaBelum ada peringkat
- FONDASIDokumen18 halamanFONDASIArnita ArnitaBelum ada peringkat
- Optimized Foundation TypesDokumen20 halamanOptimized Foundation Typesderry triBelum ada peringkat
- Materi Banper... 3Dokumen42 halamanMateri Banper... 3Ikhsan Fauzi GpBelum ada peringkat
- Daftar SimbolDokumen6 halamanDaftar SimbolHipmi STARupBelum ada peringkat
- Cara Mencetak Table SAP 2000Dokumen11 halamanCara Mencetak Table SAP 2000FendyAnggaraBelum ada peringkat
- Perbaikan Bangunan Pasca Bencana Gempa (Unknown)Dokumen19 halamanPerbaikan Bangunan Pasca Bencana Gempa (Unknown)kristdhanyBelum ada peringkat
- ANALISA STRUKTURDokumen5 halamanANALISA STRUKTURAlhamdi AldhiBelum ada peringkat
- KAPASITAS TIANGDokumen3 halamanKAPASITAS TIANGFajar Boehtiawan SaputraBelum ada peringkat
- Tugas BesarDokumen16 halamanTugas Besarnoni ladeseliBelum ada peringkat
- Kompilasi 113Dokumen85 halamanKompilasi 113Basir AbdurrahmanBelum ada peringkat
- Turap Kantilever Pada Kondisi KhususDokumen15 halamanTurap Kantilever Pada Kondisi KhususRefianda Eki100% (1)
- TINGGI HUJANDokumen19 halamanTINGGI HUJANDamar FarhadivaBelum ada peringkat
- TIANG KELOMPOKDokumen12 halamanTIANG KELOMPOKjayadiBelum ada peringkat
- Design Tebal Rigid PavementDokumen26 halamanDesign Tebal Rigid PavementMuhamad Fauzi DarmawanBelum ada peringkat
- Rekayasa Jembatan Baja: Kelompok 2 Muhammad Aldi (1904101010109) Ichsan Qibriel H (1904101010063)Dokumen16 halamanRekayasa Jembatan Baja: Kelompok 2 Muhammad Aldi (1904101010109) Ichsan Qibriel H (1904101010063)Ichsan QibrielBelum ada peringkat
- Alat Pemancang TiangDokumen9 halamanAlat Pemancang Tiangarbotomo_marbunBelum ada peringkat
- Justifikasi Teknis #012 Konstruksi Pengaman Sliding Saluran PengelakDokumen73 halamanJustifikasi Teknis #012 Konstruksi Pengaman Sliding Saluran Pengelakchandra adriawanBelum ada peringkat
- Konstruksi Jembatan BetonDokumen7 halamanKonstruksi Jembatan BetonPutuIndraAdityaBelum ada peringkat
- 9.pondasi Pancang. 1Dokumen41 halaman9.pondasi Pancang. 1novitamaBelum ada peringkat
- Tebal Perkerasan ExcelDokumen3 halamanTebal Perkerasan ExcelAhmad Adi TrapsiloBelum ada peringkat
- Sambungan Kayu Batang TekanDokumen30 halamanSambungan Kayu Batang TekanAde Satya RamadhanBelum ada peringkat
- Perencanaan TanggaDokumen2 halamanPerencanaan TanggapeterglobalBelum ada peringkat
- Gaya Tarik Pondasi Tiang - 11032-9-570453326377Dokumen17 halamanGaya Tarik Pondasi Tiang - 11032-9-570453326377harisleeBelum ada peringkat
- RANGKA ATAPDokumen40 halamanRANGKA ATAPCalvin SyatauwBelum ada peringkat
- 15 Menganalisis Jadwal Pengelolaan Waktu Pekerjaan (Time Schedule, Bar Chart Dan S Curve) Pada Pekerjaan Jalan, Irigasi Dan JembatanDokumen33 halaman15 Menganalisis Jadwal Pengelolaan Waktu Pekerjaan (Time Schedule, Bar Chart Dan S Curve) Pada Pekerjaan Jalan, Irigasi Dan JembatanANNA AEBelum ada peringkat
- Pelat Kopel 1Dokumen11 halamanPelat Kopel 1Moch Imam Muflih0% (1)
- Teknik Pondasi - TurapDokumen12 halamanTeknik Pondasi - TurapAnggaBelum ada peringkat
- Soal Uts Mektan 2 2014Dokumen4 halamanSoal Uts Mektan 2 2014Nur Afwani WidhiyantoBelum ada peringkat
- Lapisan Perkerasan JalanDokumen10 halamanLapisan Perkerasan JalanDesy Krisna CahyaBelum ada peringkat
- PONDASI SEMESTER 4Dokumen30 halamanPONDASI SEMESTER 4fikriBelum ada peringkat
- BAB I PENDAHULUANDokumen53 halamanBAB I PENDAHULUANParlindungan HutabaratBelum ada peringkat
- Rumus Daya Dukung PondasiDokumen16 halamanRumus Daya Dukung PondasiEKOYBelum ada peringkat
- Produktifitas ExcavatorDokumen8 halamanProduktifitas ExcavatorwilliamBelum ada peringkat
- BABIV-LENTURDokumen38 halamanBABIV-LENTURnovanBelum ada peringkat
- MDOFDokumen26 halamanMDOFYulianaBelum ada peringkat
- Pola Tata TanamDokumen12 halamanPola Tata TanamJunaid Al DaruriBelum ada peringkat
- HITUNGAN BEBAN BALOKDokumen4 halamanHITUNGAN BEBAN BALOKAnti Yang AntiBelum ada peringkat
- Bab 12 Perencanaan Daerah End Block Zona AngkurDokumen12 halamanBab 12 Perencanaan Daerah End Block Zona AngkurSri SusantiBelum ada peringkat
- OPTIMASI GEOMETRI JALANDokumen81 halamanOPTIMASI GEOMETRI JALANwandizeeBelum ada peringkat
- OPTIMASI PELATDokumen12 halamanOPTIMASI PELATAlva LukasBelum ada peringkat
- STRUKTUR KAYUDokumen14 halamanSTRUKTUR KAYUWilly OkcandraBelum ada peringkat
- TPJ 4Dokumen26 halamanTPJ 4Ptp AbyBelum ada peringkat
- Hujan dan Debit Rencana untuk DrainaseDokumen7 halamanHujan dan Debit Rencana untuk DrainaseAbd HasyimBelum ada peringkat
- Pondasi Tiang Lanjutan (RekPII, 1)Dokumen21 halamanPondasi Tiang Lanjutan (RekPII, 1)Tfany EzmiraBelum ada peringkat
- TIPS CEPAT SAP2000Dokumen15 halamanTIPS CEPAT SAP2000Asdi HssBelum ada peringkat
- Sondir FixDokumen12 halamanSondir FixTito HerdiantoBelum ada peringkat
- Analisa Struktur 2 Modul 4-Dasar Metoda GayaDokumen15 halamanAnalisa Struktur 2 Modul 4-Dasar Metoda GayaMuharruddinBelum ada peringkat
- Pelat Beton BertulangDokumen33 halamanPelat Beton BertulangardiBelum ada peringkat
- Perilaku Dinamis2 StrukturDokumen6 halamanPerilaku Dinamis2 Strukturlukman kurniawanBelum ada peringkat
- BAB 1 Analisa Sistem MekanikDokumen9 halamanBAB 1 Analisa Sistem MekanikYoga Angguino Sahputra MaithBelum ada peringkat
- GetaranDokumen42 halamanGetaranTiika Tuu IkkaBelum ada peringkat
- Getaran MekanisDokumen27 halamanGetaran MekanisChairil Anwar Albanjary50% (2)
- GHSDokumen12 halamanGHSMahasin Maulana AhmadBelum ada peringkat
- Kinematika GetaranDokumen12 halamanKinematika GetaranDefrianto PratamaBelum ada peringkat
- GETARAN TEREDAM OPTIMALDokumen5 halamanGETARAN TEREDAM OPTIMALFikri BarceloniEzta'puollBelum ada peringkat
- Dana Acara Hut KeDokumen1 halamanDana Acara Hut KeMuhammad HafizBelum ada peringkat
- Jadwal Uas Genap 2019-2020Dokumen2 halamanJadwal Uas Genap 2019-2020Muhammad HafizBelum ada peringkat
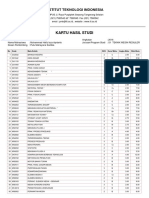
- KHS Semester - 1Dokumen2 halamanKHS Semester - 1Muhammad HafizBelum ada peringkat
- Tugas Pengukuran TeknikDokumen2 halamanTugas Pengukuran TeknikMuhammad HafizBelum ada peringkat
- IrwansyahDokumen5 halamanIrwansyahMuhammad HafizBelum ada peringkat
- Termokopel-Pengertian-dan-Prinsip-KerjaDokumen2 halamanTermokopel-Pengertian-dan-Prinsip-KerjaMuhammad HafizBelum ada peringkat
- Termokopel-Pengertian-dan-Prinsip-KerjaDokumen2 halamanTermokopel-Pengertian-dan-Prinsip-KerjaMuhammad HafizBelum ada peringkat
- Termokopel-Pengertian-dan-Prinsip-KerjaDokumen2 halamanTermokopel-Pengertian-dan-Prinsip-KerjaMuhammad HafizBelum ada peringkat
- MBT HafizDokumen37 halamanMBT HafizMuhammad HafizBelum ada peringkat
- Termokopel-Pengertian-dan-Prinsip-KerjaDokumen2 halamanTermokopel-Pengertian-dan-Prinsip-KerjaMuhammad HafizBelum ada peringkat
- MBT HafizDokumen37 halamanMBT HafizMuhammad HafizBelum ada peringkat
- Makalah Tugas MBTDokumen20 halamanMakalah Tugas MBTMuhammad HafizBelum ada peringkat
- MBT HafizDokumen37 halamanMBT HafizMuhammad HafizBelum ada peringkat
- Makalah Tugas MBTDokumen20 halamanMakalah Tugas MBTMuhammad HafizBelum ada peringkat
- Makalah Tugas MBTDokumen20 halamanMakalah Tugas MBTMuhammad HafizBelum ada peringkat