Anda mungkin juga menyukai
- Kerby Simbolon - Tugas Dinamika TeknikDokumen20 halamanKerby Simbolon - Tugas Dinamika Teknik20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Tugas 1 Kinematika Andika Putra CaniagoDokumen4 halamanTugas 1 Kinematika Andika Putra Caniagoandika putra caniagoBelum ada peringkat
- Bab IDokumen20 halamanBab IBean WBelum ada peringkat
- Buku Kinematika & Dinamika TeknikDokumen49 halamanBuku Kinematika & Dinamika TeknikYogi Dwi AndiBelum ada peringkat
- Derajat KebebasanDokumen34 halamanDerajat KebebasanAdianta GeorBelum ada peringkat
- Kinematika Dan Dinamika MesinDokumen18 halamanKinematika Dan Dinamika MesinDEVYBelum ada peringkat
- Bab I Konsep Dasar Elemen MesinDokumen21 halamanBab I Konsep Dasar Elemen MesinNengah Saputra Wijaya75% (4)
- UTS KINEMATIKA DAN DINAMIKA Muhammad Akbar Sugandi 19067096Dokumen6 halamanUTS KINEMATIKA DAN DINAMIKA Muhammad Akbar Sugandi 19067096akbar Sugandhi100% (1)
- Konsep Dasar Kinematika Dan DinamikaDokumen13 halamanKonsep Dasar Kinematika Dan DinamikaGinanjar Hadi SukmaBelum ada peringkat
- KDT 3 - Gerak RelatifDokumen17 halamanKDT 3 - Gerak RelatifInsyiBelum ada peringkat
- Rang KumanDokumen8 halamanRang KumankurniawanmuttongBelum ada peringkat
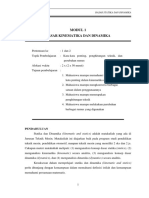
- Pertemuan 1 Pengantar Dinamika TeknikDokumen27 halamanPertemuan 1 Pengantar Dinamika TeknikNurmeji NurmejiBelum ada peringkat
- Bab IDokumen24 halamanBab INaufal Hana RizqullahBelum ada peringkat
- Kinematika Dan DinamikaDokumen12 halamanKinematika Dan DinamikaMask Black100% (2)
- PERBAIKAN KINEMATIK tHARIQ ABDUL AZIS 21160038Dokumen18 halamanPERBAIKAN KINEMATIK tHARIQ ABDUL AZIS 21160038toriq abdul azizBelum ada peringkat
- Pemodelan StrukturDokumen12 halamanPemodelan StrukturAnonymous NPJyEpVSBelum ada peringkat
- 2 Bahan Ajar Sistem KontrolDokumen7 halaman2 Bahan Ajar Sistem KontrolHeadline News UpdateBelum ada peringkat
- Analisa Dinamik Model Mekanisme Slider CDokumen12 halamanAnalisa Dinamik Model Mekanisme Slider CRohman suhadaBelum ada peringkat
- Tugas Belajar Mandiri - Kinematika - 122019135 - Adit Andriana 1Dokumen3 halamanTugas Belajar Mandiri - Kinematika - 122019135 - Adit Andriana 1Adit andriiBelum ada peringkat
- Modul Analisa Struktur 2 (TM3)Dokumen12 halamanModul Analisa Struktur 2 (TM3)Joshua SimorangkirBelum ada peringkat
- Kinematika Dan Dinamika TeknikDokumen34 halamanKinematika Dan Dinamika TeknikRama Satria Cilegone100% (2)
- Pertemuan Ke - 7Dokumen20 halamanPertemuan Ke - 7sadiana putraBelum ada peringkat
- Salinan Terjemahan Salinan Terjemahan MEKANIKA 24 PDFDokumen13 halamanSalinan Terjemahan Salinan Terjemahan MEKANIKA 24 PDFnola agustinaBelum ada peringkat
- Kinematik 1Dokumen13 halamanKinematik 1al puketBelum ada peringkat
- MAKALAH Konsep KeseimbanganDokumen14 halamanMAKALAH Konsep KeseimbanganHidayat 'yayat' HaRaa60% (5)
- 2013 08 23 10 18 03 - Ev2 - D3 PDFDokumen154 halaman2013 08 23 10 18 03 - Ev2 - D3 PDFRenaldyBelum ada peringkat
- Kinematika Dan Dinamika TeknikDokumen35 halamanKinematika Dan Dinamika TeknikYogo Elfanov67% (3)
- Kuliah Mekanika Teknik Dasar UNYDokumen126 halamanKuliah Mekanika Teknik Dasar UNYCahya UtamaBelum ada peringkat
- Baca ... Bahan Ajar Fisika (PT) & LKMDokumen45 halamanBaca ... Bahan Ajar Fisika (PT) & LKMAsima SimbolonBelum ada peringkat
- Mekanika Teknik Pertemuan 2Dokumen38 halamanMekanika Teknik Pertemuan 2azamataufiqBelum ada peringkat
- MAKALAH Sistem Gaya FixDokumen16 halamanMAKALAH Sistem Gaya FixHidayat 'yayat' HaRaaBelum ada peringkat
- Kinematika Full RemovedDokumen34 halamanKinematika Full Removedadityaalpajri173Belum ada peringkat
- KinematikaDokumen26 halamanKinematikaGymkh AanBelum ada peringkat
- Kinematikadan Dinamika Gerak 6 Derajat KebebasanDokumen5 halamanKinematikadan Dinamika Gerak 6 Derajat Kebebasanputra wisnuBelum ada peringkat
- Tugas Ii Getaran MekanikDokumen13 halamanTugas Ii Getaran MekanikRudianto AntoBelum ada peringkat
- Soal Fisika1Dokumen53 halamanSoal Fisika1Reyner Reagen KesumaBelum ada peringkat
- Tugas Pkwu Sistem TeknikDokumen14 halamanTugas Pkwu Sistem Teknik22. Mutya Ayu ListyowatiBelum ada peringkat
- Dasar Statika Dan Dinamika by AdvisorDokumen17 halamanDasar Statika Dan Dinamika by AdvisorHerryBelum ada peringkat
- Teori Dasar Mekanika VibrasiDokumen17 halamanTeori Dasar Mekanika VibrasiSyifa Fauziyah0% (1)
- Mekanisme Dan Dinamika TeknikDokumen8 halamanMekanisme Dan Dinamika TeknikHaris Naqihul AdibBelum ada peringkat
- Kinematika Dan DinamikaDokumen12 halamanKinematika Dan DinamikaPrabowo Wicaksono0% (1)
- Dasar Sistem Kendali BAB IIIDokumen52 halamanDasar Sistem Kendali BAB IIINizamMulukBelum ada peringkat
- Mekanisme & DinamikaDokumen24 halamanMekanisme & DinamikaWanda AzizahBelum ada peringkat
- Tugas Elemen Mesin 1Dokumen5 halamanTugas Elemen Mesin 1Farhan PHartonoBelum ada peringkat
- Dinamika StrukturDokumen53 halamanDinamika StrukturagungBelum ada peringkat
- Soal Dan Jawaban KinematikaDokumen17 halamanSoal Dan Jawaban KinematikaWildan FachreziBelum ada peringkat
- Kinematika Teknik Pertemuan 3 2022Dokumen28 halamanKinematika Teknik Pertemuan 3 2022iman muhamadBelum ada peringkat
- Bab 1 - 2 Bismillah ACCDokumen14 halamanBab 1 - 2 Bismillah ACCGugus ilhamBelum ada peringkat
- Sistem GayaDokumen16 halamanSistem GayaBoyyBelum ada peringkat
- Mekanika Teknik Mektek - POLIJEDokumen33 halamanMekanika Teknik Mektek - POLIJEVirgiawanBelum ada peringkat
- Kinematika Dan Dinamika TeknikDokumen34 halamanKinematika Dan Dinamika TeknikMuhammad IbadurrochimBelum ada peringkat
- KinematikaDokumen8 halamanKinematikaKuncoro Triandono MuktiBelum ada peringkat
- Mekanika TeknikDokumen126 halamanMekanika TeknikWa Ode MuslimahBelum ada peringkat
- Elemen MesinDokumen388 halamanElemen MesinWidya AriskaBelum ada peringkat
- Pemodelan Wind Turbine Rotor Tipe Hawt (Horizontal Axis Wind Turbine) Menggunakan Metode Volume HinggaDokumen10 halamanPemodelan Wind Turbine Rotor Tipe Hawt (Horizontal Axis Wind Turbine) Menggunakan Metode Volume HinggaR GikiswantoBelum ada peringkat
- Momentum AngulerDokumen16 halamanMomentum AngulerAulia Risky RahmawatiBelum ada peringkat
- Berita Acara Serah TerimaDokumen3 halamanBerita Acara Serah Terima20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- PROPOSAL Metodologi Penelitian BalancingDokumen44 halamanPROPOSAL Metodologi Penelitian Balancing20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Kerby S Yosua H Simbolon - Tugas 4 Manajemen Perubahan PemeliharaanDokumen5 halamanKerby S Yosua H Simbolon - Tugas 4 Manajemen Perubahan Pemeliharaan20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- PROPOSAL BISNIS PLAN Kelompok 1 Bengkel Sepeda Motor Kerby DKKDokumen13 halamanPROPOSAL BISNIS PLAN Kelompok 1 Bengkel Sepeda Motor Kerby DKK20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Laporan KP Kerby 20-015Dokumen62 halamanLaporan KP Kerby 20-01520-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Kerby S Yosua H Simbolon - Tugas 2 Manajemen PerubahanDokumen8 halamanKerby S Yosua H Simbolon - Tugas 2 Manajemen Perubahan20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Cara Mencegah Pecandu Narkoba Lebih Cepa11Dokumen1 halamanCara Mencegah Pecandu Narkoba Lebih Cepa1120-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Capstone Design Kelompok FDokumen8 halamanCapstone Design Kelompok F20-015 Kerby S Yosua H SimbolonBelum ada peringkat
- Pancasila Sebagai Dasar NegaraDokumen59 halamanPancasila Sebagai Dasar Negara20-015 Kerby S Yosua H SimbolonBelum ada peringkat