Anda mungkin juga menyukai
- Benda TegarDokumen36 halamanBenda TegarMuhammad Asyraf Sarigo MatondangBelum ada peringkat
- Momentum Dan Sistem PartikelDokumen56 halamanMomentum Dan Sistem PartikelNick YogaBelum ada peringkat
- Sistem Partikel Kel 6Dokumen69 halamanSistem Partikel Kel 6lincariaBelum ada peringkat
- Pertemuan 11 - Mekanika Banyak Partikel Bagian IDokumen7 halamanPertemuan 11 - Mekanika Banyak Partikel Bagian INsaaBelum ada peringkat
- Rangkuman Fisika X RPL 2Dokumen8 halamanRangkuman Fisika X RPL 2Steven YonathanBelum ada peringkat
- P10. Momentum Dan Pusat Massa 181022Dokumen39 halamanP10. Momentum Dan Pusat Massa 181022Muyassarah MaharaniBelum ada peringkat
- Momentum Linier Dan TumbukanDokumen30 halamanMomentum Linier Dan TumbukantitirBelum ada peringkat
- Bab Sistem PartikelDokumen40 halamanBab Sistem PartikelBarorotutDawamahBelum ada peringkat
- Momentum Linier 40275Dokumen28 halamanMomentum Linier 40275RIZQI IMAM ARFA ZAKARIABelum ada peringkat
- Rangkuman Fisdas Bab IvDokumen8 halamanRangkuman Fisdas Bab IvArchinta PutriBelum ada peringkat
- Fisdas 1 - Pusat Massa Dan Gerak RoketDokumen28 halamanFisdas 1 - Pusat Massa Dan Gerak RoketPutri Dwi CahyantiBelum ada peringkat
- Momentum Linier Dan TumbukanDokumen31 halamanMomentum Linier Dan TumbukanPuji SuharmantoBelum ada peringkat
- Sistem Partikel Dan Kekekalan Momentum (Compatibility Mode)Dokumen30 halamanSistem Partikel Dan Kekekalan Momentum (Compatibility Mode)Niken Wahyu GafraniBelum ada peringkat
- R R R R I J : PendahuluanDokumen39 halamanR R R R I J : PendahuluanNurul IkraBelum ada peringkat
- Momentum ImpulsDokumen16 halamanMomentum ImpulsAndreyan PoerwonegoroBelum ada peringkat
- FD Pta 2020 06Dokumen29 halamanFD Pta 2020 06Payus Fatwa Dien XI DPIB 2Belum ada peringkat
- Daya Dan MomentumDokumen32 halamanDaya Dan MomentumEgar RasendriyaBelum ada peringkat
- 6) Momentum LinerDokumen18 halaman6) Momentum LinerMuhamad fadly ArifBelum ada peringkat
- Bab 6. MomentumDokumen27 halamanBab 6. MomentumErenz Eugene ArungtasikBelum ada peringkat
- Momentum Linier Dan TumbukanDokumen32 halamanMomentum Linier Dan Tumbukankuliahfisikadasar100% (1)
- Paket 5 FisikaDokumen19 halamanPaket 5 FisikaAchmad Dhani FauziBelum ada peringkat
- Soal Paket 5 FisikaDokumen10 halamanSoal Paket 5 FisikaSuci Hidayanti20Belum ada peringkat
- Fisika RotasiDokumen1 halamanFisika RotasiZxy AmauBelum ada peringkat
- 2Dokumen32 halaman2Bintang MUBelum ada peringkat
- Momentum Dan Pusat MassaDokumen52 halamanMomentum Dan Pusat MassaILHAM SYAHPUTRABelum ada peringkat
- f110 MomentumDokumen15 halamanf110 Momentumappundana02Belum ada peringkat
- Present 1Dokumen27 halamanPresent 1Waichi100% (2)
- Momentum Dan Impuls PDFDokumen15 halamanMomentum Dan Impuls PDF211 024M Daffa' Rahman RBelum ada peringkat
- Momentum Linear Dan Tumbukan (Kelompok 7)Dokumen17 halamanMomentum Linear Dan Tumbukan (Kelompok 7)Nurul HudayaBelum ada peringkat
- Modul 6. Momentum Sudut Dan Benda TegarDokumen12 halamanModul 6. Momentum Sudut Dan Benda TegarWeb- Progremming-UnifaBelum ada peringkat
- Modul 6 Momentum Sudut Dan Benda Tegar - 220809 - 121922Dokumen12 halamanModul 6 Momentum Sudut Dan Benda Tegar - 220809 - 121922Allida MaharaniBelum ada peringkat
- Persamaan Dasar Dalam IntegralDokumen12 halamanPersamaan Dasar Dalam IntegralRachmat AlfinasBelum ada peringkat
- Dinamika Sistem PartikelDokumen63 halamanDinamika Sistem PartikelmeimiayaBelum ada peringkat
- Bagian V2010Dokumen29 halamanBagian V2010Qonita Deifaky TsauriaBelum ada peringkat
- Momentum Linear Dan TumbukanDokumen17 halamanMomentum Linear Dan TumbukanPrastha Pratama PutraBelum ada peringkat
- Opca Kinematika PDFDokumen73 halamanOpca Kinematika PDFK0% (1)
- 6) Momentum LinerDokumen48 halaman6) Momentum LinerSyahril RahmatBelum ada peringkat
- Phys111 Lecture08indo PDFDokumen54 halamanPhys111 Lecture08indo PDF211 024M Daffa' Rahman RBelum ada peringkat
- Persamaan Dasar Dalam IntegralDokumen70 halamanPersamaan Dasar Dalam IntegralRissaBelum ada peringkat
- 01 Pengenalan Dinamika StrukturDokumen16 halaman01 Pengenalan Dinamika StrukturTony Ong50% (2)
- Benda Tegar OkDokumen46 halamanBenda Tegar OkFebiana AnaBelum ada peringkat
- Ringkasan Materi MomentumDokumen2 halamanRingkasan Materi Momentumspd bahril100% (2)
- SP Pertemuan 1 (KINEMATIKA)Dokumen19 halamanSP Pertemuan 1 (KINEMATIKA)agi dahtiarBelum ada peringkat
- BAB 4a Momentum - ITT TelkomDokumen26 halamanBAB 4a Momentum - ITT TelkomNightSkyBelum ada peringkat
- Salinan SOAL PAKET 5 FISIKADokumen10 halamanSalinan SOAL PAKET 5 FISIKAVita OktavianiBelum ada peringkat
- Resultan Gaya Sebidang1Dokumen7 halamanResultan Gaya Sebidang1tauchosekarBelum ada peringkat
- Bab 4.pers - Dasar DLM IntegralDokumen49 halamanBab 4.pers - Dasar DLM IntegralFaizal YogaBelum ada peringkat
- Impuls Dan Momentum 2 November 2021Dokumen18 halamanImpuls Dan Momentum 2 November 2021Yoshe VundasBelum ada peringkat
- Tutor 5A Momentum & Impuls + Pretest + Tugas + PRDokumen35 halamanTutor 5A Momentum & Impuls + Pretest + Tugas + PRAdien Gumilang100% (1)
- BHN Kuliah Fisika I - 5Dokumen41 halamanBHN Kuliah Fisika I - 5Iqbal GusrandaBelum ada peringkat
- FisDas WS UAS 1E PDFDokumen85 halamanFisDas WS UAS 1E PDFRaepaksi JaladaraBelum ada peringkat
- Momentum Linear Dan TumbukanDokumen15 halamanMomentum Linear Dan TumbukanLuisa NataliaBelum ada peringkat
- Momentum ImpulsDokumen44 halamanMomentum ImpulsCQChoongBelum ada peringkat
- Modul 5. Momentum Linier Dan TumbukanDokumen26 halamanModul 5. Momentum Linier Dan TumbukanChindy ChristieBelum ada peringkat
- Jobsheet 6 Momentum LinierDokumen3 halamanJobsheet 6 Momentum Liniertiara8heldinaBelum ada peringkat
- Penyebaran Mahasiswa KMM Universitas Malikussaleh 2023 OkeDokumen2 halamanPenyebaran Mahasiswa KMM Universitas Malikussaleh 2023 OkeSiska RahayuBelum ada peringkat
- Faktor-Faktor Belajar. Kel 2Dokumen8 halamanFaktor-Faktor Belajar. Kel 2Siska RahayuBelum ada peringkat
- Materi VIDokumen15 halamanMateri VISiska RahayuBelum ada peringkat
- LAMPIRANDokumen101 halamanLAMPIRANSiska RahayuBelum ada peringkat
- Bahan Semikonduktor IIDokumen19 halamanBahan Semikonduktor IISiska RahayuBelum ada peringkat
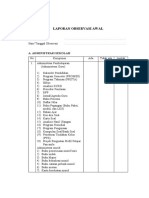
- Laporan Observasi Awal PDFDokumen5 halamanLaporan Observasi Awal PDFFahra AnisaBelum ada peringkat
- Kelompok 3.. Faktor-Faktor Yang MempengaruhiDokumen21 halamanKelompok 3.. Faktor-Faktor Yang MempengaruhiSiska RahayuBelum ada peringkat
- Laporan Praktikum Fisika Dasar Tumbukan Kelompok 4 Dari Modul Kelompok 6-1Dokumen23 halamanLaporan Praktikum Fisika Dasar Tumbukan Kelompok 4 Dari Modul Kelompok 6-1Siska Rahayu100% (1)
- Laporan Praktikum Gaya Dan Gerak Kelompok 4Dokumen26 halamanLaporan Praktikum Gaya Dan Gerak Kelompok 4Siska RahayuBelum ada peringkat
- YOGURT Oleh SISKADokumen7 halamanYOGURT Oleh SISKASiska RahayuBelum ada peringkat
- Makalah Motivasi BelajarDokumen8 halamanMakalah Motivasi BelajarSiska RahayuBelum ada peringkat
- Energi Dalam KapasitorDokumen25 halamanEnergi Dalam KapasitorSiska RahayuBelum ada peringkat
- Keimanan Dan KetaqwanDokumen12 halamanKeimanan Dan KetaqwanSiska RahayuBelum ada peringkat
- Behaviorisme - Kelompok 7Dokumen6 halamanBehaviorisme - Kelompok 7Siska RahayuBelum ada peringkat
- Rangkaian ListrikDokumen33 halamanRangkaian ListrikSiska RahayuBelum ada peringkat
- Kel. 3 Hubungan Arus Pada TransistorDokumen11 halamanKel. 3 Hubungan Arus Pada TransistorSiska RahayuBelum ada peringkat
- Tipe-Tipe Dasar Kisi Kristal Kelompok 1Dokumen7 halamanTipe-Tipe Dasar Kisi Kristal Kelompok 1Siska RahayuBelum ada peringkat