Anda mungkin juga menyukai
- Tugas Besar Sistem Kontrol Rahmat ArifDokumen15 halamanTugas Besar Sistem Kontrol Rahmat ArifUBI BULOGBelum ada peringkat
- Fungsi TransferDokumen6 halamanFungsi TransferSatuan Penjaminan MutuBelum ada peringkat
- 7) Sis Data Tercuplik (Tersampel)Dokumen7 halaman7) Sis Data Tercuplik (Tersampel)Rizki RamadhanBelum ada peringkat
- Materi 01plusDokumen18 halamanMateri 01plusRikki HamzahBelum ada peringkat
- Model Matematis 1Dokumen30 halamanModel Matematis 1ivan rizaldyBelum ada peringkat
- Ni Made Mareta Dwi Anjani - Reguler 4 - UTS Fisika DasarDokumen29 halamanNi Made Mareta Dwi Anjani - Reguler 4 - UTS Fisika DasarMareta DwiiBelum ada peringkat
- RobotikaDokumen10 halamanRobotikadandyBelum ada peringkat
- State Space Motor SpeedDokumen2 halamanState Space Motor Speedgraig lenoBelum ada peringkat
- Simulasi Pemodelan Matematika Sistem MekanikDokumen9 halamanSimulasi Pemodelan Matematika Sistem MekanikMuhammad Khoirun NadirBelum ada peringkat
- ITS Undergraduate 19303 Paper 1808760 PDFDokumen6 halamanITS Undergraduate 19303 Paper 1808760 PDFafif bBelum ada peringkat
- Teori Sistem KontrolDokumen65 halamanTeori Sistem Kontrolmhafidz49Belum ada peringkat
- UntitledDokumen22 halamanUntitlediqbal trading25Belum ada peringkat
- Ujian Akhir Semester Pengendalian Proses Teknik Kimia A 2017Dokumen4 halamanUjian Akhir Semester Pengendalian Proses Teknik Kimia A 2017bella0% (2)
- Merancang LiftDokumen12 halamanMerancang LiftJoni Irawan100% (2)
- Materi 1 Model Matematis Sistem Fisik-1Dokumen83 halamanMateri 1 Model Matematis Sistem Fisik-1Amelia Agista PutriBelum ada peringkat
- Pemodelan Nisbah AlihDokumen20 halamanPemodelan Nisbah AlihAbdi Kurniawan0% (1)
- Venny Manca Putri - (D1022191026) - UTS - Dasar Sistem Kendali CDokumen6 halamanVenny Manca Putri - (D1022191026) - UTS - Dasar Sistem Kendali CVenny Manca putriBelum ada peringkat
- Modul 2 - Fungsi Transfer Poles Dan Zeros Teknik Elektro UNCDokumen2 halamanModul 2 - Fungsi Transfer Poles Dan Zeros Teknik Elektro UNCAnonymous nNGjgbavBelum ada peringkat
- 3727S1TMME60422018 - Getaran Mekanis - Pertemuan 3 - Materi TambahanDokumen5 halaman3727S1TMME60422018 - Getaran Mekanis - Pertemuan 3 - Materi TambahanAndreas AdiebBelum ada peringkat
- Penentuan Persamaan Gerak Suatu Sistem Ideal Dari Soal No. 10 Dengan Metode Virtual DisplacementDokumen6 halamanPenentuan Persamaan Gerak Suatu Sistem Ideal Dari Soal No. 10 Dengan Metode Virtual DisplacementJamhari Hidayat Bin MustofaBelum ada peringkat
- Laplace Dan Fungsi AlihDokumen15 halamanLaplace Dan Fungsi AlihDwi KurniawanBelum ada peringkat
- PERCOBAAN I Dasar Sistem KendaliDokumen11 halamanPERCOBAAN I Dasar Sistem KendaliAsyifa NadhiraBelum ada peringkat
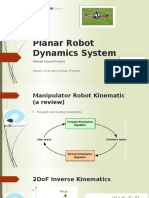
- Robot Manipulator - Planar Dynamic SystemDokumen21 halamanRobot Manipulator - Planar Dynamic Systemiksan maulanaBelum ada peringkat
- TPL0362 - 08 - Transformasi, Translasi Dan RotasiDokumen7 halamanTPL0362 - 08 - Transformasi, Translasi Dan RotasiHAFBelum ada peringkat
- Revisi Modul 4 Praktikum Sinyal Dan SistemDokumen6 halamanRevisi Modul 4 Praktikum Sinyal Dan SistemMuhammad Zaki Ainur RazzaqBelum ada peringkat
- Bab 3 - Sistem Kendali - FixDokumen37 halamanBab 3 - Sistem Kendali - Fixiskandar trxBelum ada peringkat
- Project AnalisisDokumen9 halamanProject AnalisisYudistira BannepadangBelum ada peringkat
- Tugas Fismat RBLDokumen21 halamanTugas Fismat RBLulfatun ni'mahBelum ada peringkat
- Laporan Praktikum PISDokumen24 halamanLaporan Praktikum PISRashif SetiawanBelum ada peringkat
- Untuk Getaran AsistensiDokumen30 halamanUntuk Getaran Asistensimuhmmd FahrulBelum ada peringkat
- 02 - Model Matematika Sistem DinamikDokumen68 halaman02 - Model Matematika Sistem Dinamikalda amanda esmeraldaBelum ada peringkat
- Model Matematik Sistem FisikDokumen8 halamanModel Matematik Sistem FisikRizki LesmanaBelum ada peringkat
- Tugas 4 - Pemodelan Sistem Mekanik Gerak Rotasi 1Dokumen11 halamanTugas 4 - Pemodelan Sistem Mekanik Gerak Rotasi 1nawirmekatronikaBelum ada peringkat
- Laporan Praktikum Robotika 1Dokumen21 halamanLaporan Praktikum Robotika 1mrs.chun moeBelum ada peringkat
- Mekanika Untuk OSKDokumen41 halamanMekanika Untuk OSKDres DyasBelum ada peringkat
- Tugas Pendahuluan Modul 2Dokumen7 halamanTugas Pendahuluan Modul 2Diana SitanggangBelum ada peringkat
- Gerak Jatuh BebasDokumen13 halamanGerak Jatuh Bebassurya anggaraBelum ada peringkat
- Pemodelan Matematis Pada Sstem KontrolDokumen14 halamanPemodelan Matematis Pada Sstem KontrolYoppy PersadaBelum ada peringkat
- Pemodelan Matematika Sistem Mekanik NewDokumen6 halamanPemodelan Matematika Sistem Mekanik NewRosalinda LindaBelum ada peringkat
- Pemodelan Sistem Mekanik: Praktikum Sistem Kendali KontinyuDokumen11 halamanPemodelan Sistem Mekanik: Praktikum Sistem Kendali KontinyuFrizki AkbarBelum ada peringkat
- Prak Robot Dan Otomasi 4 Kinematika Dan Inverse Kinematika 3 DoFDokumen7 halamanPrak Robot Dan Otomasi 4 Kinematika Dan Inverse Kinematika 3 DoFyuda wicaksonoBelum ada peringkat
- Analisis Dinamik Pada Model Siklus Bisnis Is-Lm: Rosmely, E. H. Nugrahani, P. SianturiDokumen10 halamanAnalisis Dinamik Pada Model Siklus Bisnis Is-Lm: Rosmely, E. H. Nugrahani, P. SianturiArista FitriBelum ada peringkat
- Hukum Hooke, Persamaan Dasar Gerak OsilasiDokumen8 halamanHukum Hooke, Persamaan Dasar Gerak OsilasiDaud FredyBelum ada peringkat
- Fungsi Alih Orde 2Dokumen10 halamanFungsi Alih Orde 2Riki PkdBelum ada peringkat
- Fungsi Alih Orde 2Dokumen10 halamanFungsi Alih Orde 2adiBelum ada peringkat
- Praktikum ACS - Ryan Saragoza Histy 161440036Dokumen52 halamanPraktikum ACS - Ryan Saragoza Histy 161440036ryan zainBelum ada peringkat
- Dinamika Sistem LanjutDokumen5 halamanDinamika Sistem LanjutFirda JulianitaBelum ada peringkat
- Modul 6. Transformasi LinearDokumen23 halamanModul 6. Transformasi Lineararisto tagumaraBelum ada peringkat
- Transformasi 2D&3DDokumen15 halamanTransformasi 2D&3Dbeny renhartBelum ada peringkat
- Quiz SKD Sem Viii RSKDokumen1 halamanQuiz SKD Sem Viii RSKDiki AriBelum ada peringkat
- Praktikum Sistem Kontrol Digital - Pemodelan Sistem DiskritDokumen10 halamanPraktikum Sistem Kontrol Digital - Pemodelan Sistem DiskritIta AminotoBelum ada peringkat
- Modul Praktikum Sistem Kendali 2022 (Final) 2Dokumen100 halamanModul Praktikum Sistem Kendali 2022 (Final) 2Ahren MustafaBelum ada peringkat
- Tutor 4Dokumen4 halamanTutor 4Sholeh MuhammadBelum ada peringkat
- Laporan Lab Semester 6 Teknik Listrik PolmedDokumen16 halamanLaporan Lab Semester 6 Teknik Listrik PolmedNiaBelum ada peringkat
- Teknik Sistem KendaliK4 LAMADokumen20 halamanTeknik Sistem KendaliK4 LAMAAnjananda VitodiBelum ada peringkat
- Pengumuman PMMB Batch 5 PT Semen Tonasa-1Dokumen1 halamanPengumuman PMMB Batch 5 PT Semen Tonasa-1Atta BatulBelum ada peringkat
- Pertemuan 11Dokumen7 halamanPertemuan 11Atta BatulBelum ada peringkat
- 1 218 Terbaru Kemetrian MSIB 3 Surat Pernyataan Dan Semester MSIBDokumen218 halaman1 218 Terbaru Kemetrian MSIB 3 Surat Pernyataan Dan Semester MSIBAtta BatulBelum ada peringkat
- Pertemuan 7Dokumen8 halamanPertemuan 7Atta BatulBelum ada peringkat
- 1a - Lanjutan Pemrograman PLC (Instruksi Timer)Dokumen3 halaman1a - Lanjutan Pemrograman PLC (Instruksi Timer)Atta BatulBelum ada peringkat
- CV AttaDokumen1 halamanCV AttaAtta BatulBelum ada peringkat
- 2-BAHASA INGGRIS UMUM-2017-this ONE-utk MAHASISWADokumen57 halaman2-BAHASA INGGRIS UMUM-2017-this ONE-utk MAHASISWAAtta BatulBelum ada peringkat
- 0 - Beberapa Tipe PLC OMRON-CP1L Dan CP1HDokumen5 halaman0 - Beberapa Tipe PLC OMRON-CP1L Dan CP1HAtta BatulBelum ada peringkat
- 1 - Prosedur Pembuatan Program - Cx-Programmer Dan Cx-DesignerDokumen15 halaman1 - Prosedur Pembuatan Program - Cx-Programmer Dan Cx-DesignerAtta BatulBelum ada peringkat
- Elemen Elemen IndustriDokumen8 halamanElemen Elemen IndustriAtta BatulBelum ada peringkat
- Be bookBukuMonografberISBNMotor MotorListrikolehINyomanBagiadanIMadeParsa PDFDokumen116 halamanBe bookBukuMonografberISBNMotor MotorListrikolehINyomanBagiadanIMadeParsa PDFナルト ナルトBelum ada peringkat
- 03 DinamikaDokumen37 halaman03 DinamikaAtta BatulBelum ada peringkat
- Kumpulan Soal Bahasa CDokumen37 halamanKumpulan Soal Bahasa CWahyu Setiawati50% (2)
- Tugas 4 Teknik Kerja Bangku 2019 - 1B-D4 MekatronikaDokumen4 halamanTugas 4 Teknik Kerja Bangku 2019 - 1B-D4 MekatronikaAtta BatulBelum ada peringkat
- Microsoft PowerPoint - Kinematika Dan Dinamika Partikel (Merry Thressia, M.si) (Compatibility Mode)Dokumen33 halamanMicrosoft PowerPoint - Kinematika Dan Dinamika Partikel (Merry Thressia, M.si) (Compatibility Mode)Atta BatulBelum ada peringkat
- 5511 23142 1 PBDokumen9 halaman5511 23142 1 PBAtta BatulBelum ada peringkat
- 4zTnl - SURAT - KETERANGAN - BEBAS - KOMPENSASI - 2020 ATTADokumen2 halaman4zTnl - SURAT - KETERANGAN - BEBAS - KOMPENSASI - 2020 ATTAAtta BatulBelum ada peringkat
- Kuliah10 PenguatDokumen11 halamanKuliah10 PenguatAtta BatulBelum ada peringkat
- Materi PorosDokumen16 halamanMateri PorosAtta BatulBelum ada peringkat
- Gaya Dan Sistem GayaDokumen16 halamanGaya Dan Sistem GayaAtta BatulBelum ada peringkat