Anda mungkin juga menyukai
- Multatuli - Max Havelar PDFDokumen584 halamanMultatuli - Max Havelar PDFIksada Unissula67% (3)
- Tugas Makalah Sdof & MdofDokumen13 halamanTugas Makalah Sdof & Mdofdimas wahyuBelum ada peringkat
- Hitungan Tebal PerkerasanDokumen22 halamanHitungan Tebal PerkerasanMiftahudin NameAsli GakRibet44% (9)
- Uajy Metode Kekakuan PDFDokumen17 halamanUajy Metode Kekakuan PDFJames DavidBelum ada peringkat
- Mohon Kritik Dan Saran Nya Yaa :)Dokumen23 halamanMohon Kritik Dan Saran Nya Yaa :)Khairun Nisya FarenzaBelum ada peringkat
- Pengertian GetaranDokumen8 halamanPengertian Getaraniegoy100% (1)
- Bab 5. Persamaan SchrödingerDokumen36 halamanBab 5. Persamaan SchrödingerLilia RaniBelum ada peringkat
- Materi GelombangDokumen45 halamanMateri GelombangAyu Sri Menda SitepuBelum ada peringkat
- Fisika Statistik-PPT BAB 1Dokumen25 halamanFisika Statistik-PPT BAB 1Ajp ShoullBelum ada peringkat
- FULL-Analisis Numerik Untuk Gerak Osilasi Bergandeng Pada Air Track Dengan Metode Runge-KuttaDokumen4 halamanFULL-Analisis Numerik Untuk Gerak Osilasi Bergandeng Pada Air Track Dengan Metode Runge-Kuttadikidarmawan8Belum ada peringkat
- Getaran#2Dokumen34 halamanGetaran#2Adit 0110Belum ada peringkat
- CBR Fisfmat IIDokumen13 halamanCBR Fisfmat IIsatriadi pasaribuBelum ada peringkat
- Satriawan M - Mekanika StatistikDokumen73 halamanSatriawan M - Mekanika Statistikmicky kololuBelum ada peringkat
- Getaran Mekanis (Pertemuan Ketiga)Dokumen5 halamanGetaran Mekanis (Pertemuan Ketiga)eka saputraBelum ada peringkat
- MakalahDokumen24 halamanMakalahTimorensia SinagaBelum ada peringkat
- AAPrinsip Mekanika Gelombang Bab 3 ADokumen47 halamanAAPrinsip Mekanika Gelombang Bab 3 ARoni Rohana SihalohoBelum ada peringkat
- Mekstat 2021 Chap 7a NEW Perumusan Ensembel Mekanika Statistik KuantumDokumen45 halamanMekstat 2021 Chap 7a NEW Perumusan Ensembel Mekanika Statistik KuantumWahidin NuayiBelum ada peringkat
- DinstrukDokumen5 halamanDinstrukEllaBelum ada peringkat
- MK Kuantum - MEKANIKA KUANTUMDokumen25 halamanMK Kuantum - MEKANIKA KUANTUMRizal SuhardimanBelum ada peringkat
- Teknik Sistem KendaliK4 LAMADokumen20 halamanTeknik Sistem KendaliK4 LAMAAnjananda VitodiBelum ada peringkat
- Makalah NewDokumen13 halamanMakalah NewIeuan SabianBelum ada peringkat
- Makalah Dinamika Lagrance Kelompok 5Dokumen61 halamanMakalah Dinamika Lagrance Kelompok 5NurdianitaFonnaBelum ada peringkat
- EL5173 - UTS - Kelompok 2 - Topik 2 - Fundamental of Finite Element Method (FEM)Dokumen29 halamanEL5173 - UTS - Kelompok 2 - Topik 2 - Fundamental of Finite Element Method (FEM)Talo RKBelum ada peringkat
- Getaran Mekanik Uts (Rizal)Dokumen14 halamanGetaran Mekanik Uts (Rizal)MohamadRizalBelum ada peringkat
- Analisis Gerak Osilator Harmonik Dengan Gaya Pemaksa Bebas Menggunakan Metode Elemen HinggaDokumen6 halamanAnalisis Gerak Osilator Harmonik Dengan Gaya Pemaksa Bebas Menggunakan Metode Elemen HinggaAdriansyah AmanahBelum ada peringkat
- Superposisi GelombangDokumen12 halamanSuperposisi GelombangResi Maryati WargaBelum ada peringkat
- Getaran Mekanik Mekanik Pengertian Getaran Rumus Untuk Nisbah Redaman PDFDokumen33 halamanGetaran Mekanik Mekanik Pengertian Getaran Rumus Untuk Nisbah Redaman PDFYon SipahutarBelum ada peringkat
- Tugas - Ringkasan Dan Soal FismodDokumen12 halamanTugas - Ringkasan Dan Soal FismodIwan M-One AzzurriBelum ada peringkat
- Makalah Getaran MekanikaDokumen34 halamanMakalah Getaran MekanikaMuh Wildan GhofariBelum ada peringkat
- Modul p4 Analisa Respon Sistem Double Degree of Freedom Menggunakan MatchadDokumen8 halamanModul p4 Analisa Respon Sistem Double Degree of Freedom Menggunakan MatchadBudiBelum ada peringkat
- Variasi Jenis TanahDokumen10 halamanVariasi Jenis TanahYoyok SetyoBelum ada peringkat
- Tugas Dinamika Struktur KDokumen10 halamanTugas Dinamika Struktur KAisyah ahsanaBelum ada peringkat
- Bab 12-22 Fisika Statistik NewDokumen42 halamanBab 12-22 Fisika Statistik NewmuhamadBelum ada peringkat
- Bab 3Dokumen42 halamanBab 3Maria Makrina MileniumBelum ada peringkat
- Aplikasi Getaran Bebas Di IndustriDokumen8 halamanAplikasi Getaran Bebas Di IndustriAdi KurniawanBelum ada peringkat
- Korelasi AutokorelasiDokumen13 halamanKorelasi AutokorelasiIrarizkillahkBelum ada peringkat
- Persamaan Schrödinger: BAB III: Persamaan SchrodingerDokumen24 halamanPersamaan Schrödinger: BAB III: Persamaan SchrodingerNovia AndrianyBelum ada peringkat
- Konstanta PegasDokumen7 halamanKonstanta Pegasraudina100% (1)
- TUGAS DINAMIKA STRUKTUR Single Degree ofDokumen10 halamanTUGAS DINAMIKA STRUKTUR Single Degree ofRifqi Nur HaritsBelum ada peringkat
- 2106 4760 1 PBDokumen9 halaman2106 4760 1 PBFA2 StfbBelum ada peringkat
- Fungsi Gelombang PartikelDokumen10 halamanFungsi Gelombang PartikelAridarmaswari LuhBelum ada peringkat
- Modul 3 PDFDokumen14 halamanModul 3 PDFhai pradanaBelum ada peringkat
- Makalah MekanikaDokumen15 halamanMakalah MekanikaFebryan HidayatBelum ada peringkat
- Fundamentals of Modal Testing 1-2-Compressed IdDokumen36 halamanFundamentals of Modal Testing 1-2-Compressed IdRidho Bela NegaraBelum ada peringkat
- Modul 3 Sistem Linier (Sistem Waktu Diskret) - 1Dokumen10 halamanModul 3 Sistem Linier (Sistem Waktu Diskret) - 1AZIS ROSIDIBelum ada peringkat
- Part 1Dokumen6 halamanPart 1puspita rahayuBelum ada peringkat
- Makalah Mekanika Sistem PartikelDokumen27 halamanMakalah Mekanika Sistem PartikelTimorensia SinagaBelum ada peringkat
- Teori Potensial 1.1-1.7Dokumen12 halamanTeori Potensial 1.1-1.7Isti QomahBelum ada peringkat
- Tugas Ii Getaran MekanikDokumen13 halamanTugas Ii Getaran MekanikRudianto AntoBelum ada peringkat
- Karakteristik PegasDokumen6 halamanKarakteristik PegasAlwan ChemistBelum ada peringkat
- Pemodelan Bangunan Untuk Simulasi Respons Struktur Akibat Beban Dinamik PDFDokumen9 halamanPemodelan Bangunan Untuk Simulasi Respons Struktur Akibat Beban Dinamik PDFSandy YansikuBelum ada peringkat
- Translated Copy of Chapter 08Dokumen55 halamanTranslated Copy of Chapter 08Veranur FatimahBelum ada peringkat
- -Dokumen8 halaman-bidariBelum ada peringkat
- Laporan Akhir FiskomDokumen8 halamanLaporan Akhir FiskomKenneth Christian NathanaelBelum ada peringkat
- 14S18029 SaptaManurung LaporanPrakSISKENDokumen15 halaman14S18029 SaptaManurung LaporanPrakSISKENErdianto Parluhutan sitorusBelum ada peringkat
- Tugas BajaDokumen5 halamanTugas BajaKhaerul AmriBelum ada peringkat
- Materi Rekayasa PantaiDokumen46 halamanMateri Rekayasa Pantaioxi100% (5)
- Tugas P3 ADokumen1 halamanTugas P3 AKhaerul Amri100% (1)
- Tugas Rekpon ADokumen4 halamanTugas Rekpon AteguhBelum ada peringkat
- Panduan Belajar Mandiri MATLAB PDFDokumen42 halamanPanduan Belajar Mandiri MATLAB PDFRistoBelum ada peringkat
- Metoda NumerikDokumen73 halamanMetoda NumerikSepri NaldoBelum ada peringkat
- Makalah AslamDokumen6 halamanMakalah AslamKhaerul AmriBelum ada peringkat
- Modul 4Dokumen6 halamanModul 4Khaerul AmriBelum ada peringkat
- Sampul Pondasi AimiDokumen1 halamanSampul Pondasi AimiKhaerul AmriBelum ada peringkat
- DIANDokumen12 halamanDIANKhaerul AmriBelum ada peringkat
- Modul 4Dokumen6 halamanModul 4Khaerul AmriBelum ada peringkat
- Sampul Pembatas Pondasi AimiiiDokumen6 halamanSampul Pembatas Pondasi AimiiiKhaerul AmriBelum ada peringkat
- Modul 4Dokumen4 halamanModul 4teguhBelum ada peringkat
- Tugas P3 ADokumen1 halamanTugas P3 AKhaerul Amri100% (1)
- Textbook CIV 208 Diktat Analisis Numerik CIV 208 PDFDokumen87 halamanTextbook CIV 208 Diktat Analisis Numerik CIV 208 PDFKhaerul AmriBelum ada peringkat
- Contoh Pondasi (Beton 2)Dokumen65 halamanContoh Pondasi (Beton 2)Khaerul AmriBelum ada peringkat
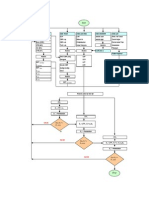
- Flowchart BisectionDokumen2 halamanFlowchart BisectionKhaerul AmriBelum ada peringkat
- Tugas BajaDokumen5 halamanTugas BajaKhaerul AmriBelum ada peringkat
- MakalahDokumen25 halamanMakalahKhaerul AmriBelum ada peringkat
- Flowchart BisectionDokumen2 halamanFlowchart BisectionKhaerul AmriBelum ada peringkat
- Flowchart BisectionDokumen2 halamanFlowchart BisectionKhaerul AmriBelum ada peringkat
- SNI 2847:2013 Persyaratan Beton Struktural Untuk Bangunan GedungDokumen265 halamanSNI 2847:2013 Persyaratan Beton Struktural Untuk Bangunan GedungCivil Engineer Share75% (4)
- Penggunaan Software Matlab Untuk Analisa Struktur: Ramses HutahaeanDokumen5 halamanPenggunaan Software Matlab Untuk Analisa Struktur: Ramses HutahaeanKhaerul AmriBelum ada peringkat
- Pertemuan 2Dokumen43 halamanPertemuan 2WedusBelum ada peringkat
- Pengukuran2 SederhanaDokumen29 halamanPengukuran2 SederhanaKhaerul AmriBelum ada peringkat
- Theodolit 1Dokumen48 halamanTheodolit 1Khaerul AmriBelum ada peringkat
- Peraturan Akademik PDFDokumen32 halamanPeraturan Akademik PDFKhaerul AmriBelum ada peringkat