Anda mungkin juga menyukai
- (DSK) (AP) (3) Dandy Rizki FirdausDokumen11 halaman(DSK) (AP) (3) Dandy Rizki FirdausDandy FirdausBelum ada peringkat
- KECEPATAN MOTOR DAN KARAKTERISTIK BEBANDokumen11 halamanKECEPATAN MOTOR DAN KARAKTERISTIK BEBANarmykevinBelum ada peringkat
- Laporan P2 Praktikum DSTLDokumen38 halamanLaporan P2 Praktikum DSTLOtniel SafkaurBelum ada peringkat
- (DSK) (AP) (1) Siti Hajar JuliatizaDokumen23 halaman(DSK) (AP) (1) Siti Hajar JuliatizaReza HariansyahBelum ada peringkat
- Bell Pushbutton dan BuzzerDokumen15 halamanBell Pushbutton dan BuzzerSullivanBelum ada peringkat
- (DSK) (SN) (1) Dandy DarmawanDokumen21 halaman(DSK) (SN) (1) Dandy DarmawanDanur Eka RBelum ada peringkat
- Analisa Percobaan Penguat FET Common DrainDokumen9 halamanAnalisa Percobaan Penguat FET Common DrainMuhammad Maulanna ZensihBelum ada peringkat
- (DSK) (SN) (5) (M.maulanna Zensih)Dokumen10 halaman(DSK) (SN) (5) (M.maulanna Zensih)Muhammad Maulanna Zensih0% (1)
- (DSK) (At) (2) Dandy Rizki FirdausDokumen20 halaman(DSK) (At) (2) Dandy Rizki FirdausDandy FirdausBelum ada peringkat
- Laporan Praktikum Beda FasaDokumen5 halamanLaporan Praktikum Beda FasaTiara AnnisaBelum ada peringkat
- (Dasmik) (MP) (5) Sri Andari DamayaniDokumen15 halaman(Dasmik) (MP) (5) Sri Andari Damayanihardian syaputraBelum ada peringkat
- LAPORAN OPTOCOUPLERDokumen9 halamanLAPORAN OPTOCOUPLERAdellia WindartoBelum ada peringkat
- Reaksi JangkarDokumen7 halamanReaksi JangkarHAMIDANBelum ada peringkat
- TEOREMA THEVENINDokumen20 halamanTEOREMA THEVENINZulfan Ari RosandyBelum ada peringkat
- Penguat Daya KomplementariDokumen7 halamanPenguat Daya KomplementariRila Inda BelgaBelum ada peringkat
- Percobaan FETDokumen10 halamanPercobaan FETAlfian N Dzul QurnainBelum ada peringkat
- Modul 1 SinyalDokumen13 halamanModul 1 SinyalReja PratamaBelum ada peringkat
- Laporan Sementara Elka 2Dokumen17 halamanLaporan Sementara Elka 2Yosua MarpaungBelum ada peringkat
- LaporanDokumen5 halamanLaporanFitrie RnaBelum ada peringkat
- Modul Saklar StatisDokumen5 halamanModul Saklar StatiswindaBelum ada peringkat
- P6 - 2321500037 - Rafli Maulana Abdullah - 2 D3 ELIN BDokumen10 halamanP6 - 2321500037 - Rafli Maulana Abdullah - 2 D3 ELIN BRafli MaulanaBelum ada peringkat
- Laporan Praktikum Op-AmpDokumen10 halamanLaporan Praktikum Op-Ampirvan setiajiBelum ada peringkat
- Alat Penghitung Volume Bensin Dalam Reservoir SPBU Dengan Sensor Ultrasonik Berbasis Mikrokontroller Atmega16Dokumen11 halamanAlat Penghitung Volume Bensin Dalam Reservoir SPBU Dengan Sensor Ultrasonik Berbasis Mikrokontroller Atmega16Cek Odp IndiHomeBelum ada peringkat
- Karakteristik DiodaDokumen9 halamanKarakteristik DiodaRENALDY ADENOGORO SUHARDIBelum ada peringkat
- BJT CB PERCOBAANDokumen6 halamanBJT CB PERCOBAANRiska Rasyida0% (1)
- Analisis Rangkaian Multivibrator Astable Dan Transistor Daya 2N3055 Sebagai Inverter 150 Watt / 220 VoltDokumen7 halamanAnalisis Rangkaian Multivibrator Astable Dan Transistor Daya 2N3055 Sebagai Inverter 150 Watt / 220 VoltEvandro ManuputtyBelum ada peringkat
- 13 Laporan Multivibrator MonostabilDokumen7 halaman13 Laporan Multivibrator MonostabilAndy MulyonoBelum ada peringkat
- Karakteristik Motor DC Beban Konstan Dan Beban VariabelDokumen11 halamanKarakteristik Motor DC Beban Konstan Dan Beban VariabelTri YogaBelum ada peringkat
- Laporan Praktikum 2Dokumen25 halamanLaporan Praktikum 2Achmad Fahmi Hidayat II100% (1)
- Generator DC ShuntDokumen16 halamanGenerator DC ShuntaididBelum ada peringkat
- COMMON EMITTER AMPLIFIERDokumen20 halamanCOMMON EMITTER AMPLIFIERbayuindraBelum ada peringkat
- 7SEGDokumen14 halaman7SEGYurika NuraniBelum ada peringkat
- Unit 1Dokumen14 halamanUnit 1Kurogane KazutoBelum ada peringkat
- PRAKTIK BJTDokumen5 halamanPRAKTIK BJTM Ikhwal AnugrahBelum ada peringkat
- Laporan Praktikum Teknik Digital Rangkaian Kombinasional Adder Dan SubstraktorDokumen13 halamanLaporan Praktikum Teknik Digital Rangkaian Kombinasional Adder Dan Substraktorsaukir rohmanBelum ada peringkat
- Irvan Sandi Manullang - Tugas 1 Mikon 2Dokumen6 halamanIrvan Sandi Manullang - Tugas 1 Mikon 2Irvan ManullangBelum ada peringkat
- ANALISA PENYEARAH 3 FASA SETENGAH GELDokumen10 halamanANALISA PENYEARAH 3 FASA SETENGAH GELariyaBelum ada peringkat
- LVDT-FREKUENSIDokumen8 halamanLVDT-FREKUENSIDestario AdiBelum ada peringkat
- DINAMIKA PENGGERAK LISTRIKDokumen9 halamanDINAMIKA PENGGERAK LISTRIKDwi SeptarinoBelum ada peringkat
- LAPORAN RESMI 5 - Penguat PelemahDokumen27 halamanLAPORAN RESMI 5 - Penguat PelemahAthia Suci FaqihaBelum ada peringkat
- Adt Kelompok 3 - LAPORAN PARAMETER ELEMEN PROPORSIONAL 1Dokumen13 halamanAdt Kelompok 3 - LAPORAN PARAMETER ELEMEN PROPORSIONAL 1Muhammad Zikri AbdillahBelum ada peringkat
- Laporan Pratikum Karakteristik Dioda Penyearah (Satria 2001051008)Dokumen18 halamanLaporan Pratikum Karakteristik Dioda Penyearah (Satria 2001051008)IjasBelum ada peringkat
- Modul02 (KhansaSalsabilaS 13116046) EL3102 RaymondSuluhTarihoranDokumen6 halamanModul02 (KhansaSalsabilaS 13116046) EL3102 RaymondSuluhTarihoranreva aryaBelum ada peringkat
- Johan Muhammad Iqbal - THREE PHASE UNCONTROLLED FULL-WAVE RECTIFIERDokumen10 halamanJohan Muhammad Iqbal - THREE PHASE UNCONTROLLED FULL-WAVE RECTIFIER04 Johan Muhammad IqbalBelum ada peringkat
- MODULASI PWMDokumen14 halamanMODULASI PWMAnonymous DMHKN9IHBelum ada peringkat
- 01 - I Komang Sulastra - 13116008 - EL3208 - Dinur Wahyu PratiwiDokumen12 halaman01 - I Komang Sulastra - 13116008 - EL3208 - Dinur Wahyu PratiwiRahman Ecky RBelum ada peringkat
- Sistim Kontraktor MagnitDokumen12 halamanSistim Kontraktor MagnitAldaBelum ada peringkat
- ThyristorDokumen47 halamanThyristorYaftoran Anes RamosBelum ada peringkat
- Generator DC Penguat TerpisahDokumen6 halamanGenerator DC Penguat TerpisahAndestianBelum ada peringkat
- Makalah Elektronika IIDokumen11 halamanMakalah Elektronika IIEka Ratna SariBelum ada peringkat
- Modul GabDokumen65 halamanModul Gabrauzatul jannahBelum ada peringkat
- Laporan Karakteristik DiodaDokumen14 halamanLaporan Karakteristik DiodaNico ImanuelBelum ada peringkat
- Karakteristik Motor DC Penguat TerpisahDokumen10 halamanKarakteristik Motor DC Penguat TerpisahaididBelum ada peringkat
- Laporan Karakteristik Dioda Rodo SilabanDokumen10 halamanLaporan Karakteristik Dioda Rodo SilabanRodo Ulitua SilabanBelum ada peringkat
- ELKA Dan PembahasanDokumen8 halamanELKA Dan PembahasancasibatsBelum ada peringkat
- 8 - Modul 6Dokumen9 halaman8 - Modul 6Intan KurniaBelum ada peringkat
- (DSK) (AM) (5) Rozan Ariq ZhalifunnasDokumen11 halaman(DSK) (AM) (5) Rozan Ariq ZhalifunnasRozan Ariq ZhalifunnasBelum ada peringkat
- KECEPATAN MOTORDokumen13 halamanKECEPATAN MOTORRENALDY ADENOGORO SUHARDIBelum ada peringkat
- Pengaturan Kecepatan Dan Karakteristik Motor DC ShuntDokumen11 halamanPengaturan Kecepatan Dan Karakteristik Motor DC ShuntHerry TBelum ada peringkat
- EXPERIMENT N.2: No Load Test Generator SinkronDokumen9 halamanEXPERIMENT N.2: No Load Test Generator SinkronMUHAMMAD RIZAL MAULANABelum ada peringkat
- Teks Sambutan Ketua Pelaksana PHBIDokumen2 halamanTeks Sambutan Ketua Pelaksana PHBIAmil MukrodBelum ada peringkat
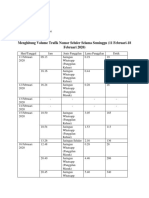
- Menghitung Volume Trafik Nomor Seluler Selama SemingguDokumen4 halamanMenghitung Volume Trafik Nomor Seluler Selama SemingguAmil MukrodBelum ada peringkat
- (Alpro) (AP.1) (BD) (Unit 4) Amil MukrodDokumen19 halaman(Alpro) (AP.1) (BD) (Unit 4) Amil MukrodAmil MukrodBelum ada peringkat
- Kapasitans Dan DielektrikDokumen8 halamanKapasitans Dan DielektrikAmil MukrodBelum ada peringkat
- Sinyal periodik sinus dengan berbagai frekuensiDokumen5 halamanSinyal periodik sinus dengan berbagai frekuensiAmil MukrodBelum ada peringkat
- Desain Antena YAGI kurang dariDokumen1 halamanDesain Antena YAGI kurang dariAmil MukrodBelum ada peringkat
- (Alpro) (AP.1) (BD) (Unit 1) Amil MukrodDokumen16 halaman(Alpro) (AP.1) (BD) (Unit 1) Amil MukrodAmil MukrodBelum ada peringkat
- (Alpro) (AP.1) (BD) (Unit 3) Amil MukrodDokumen12 halaman(Alpro) (AP.1) (BD) (Unit 3) Amil MukrodAmil MukrodBelum ada peringkat
- ANALISIS SISIPDokumen6 halamanANALISIS SISIPAmil MukrodBelum ada peringkat
- Laporan KKM Amil-ReducedDokumen65 halamanLaporan KKM Amil-ReducedAmil MukrodBelum ada peringkat
- (DSK) (AP) (2) Amil MukrodDokumen17 halaman(DSK) (AP) (2) Amil MukrodAmil MukrodBelum ada peringkat
- (DSK) (AP) (2) Amil MukrodDokumen17 halaman(DSK) (AP) (2) Amil MukrodAmil MukrodBelum ada peringkat
- Tps CiwandanDokumen18 halamanTps CiwandanAmil MukrodBelum ada peringkat
- Laporan KKM Tegal RatuDokumen65 halamanLaporan KKM Tegal RatuAmil MukrodBelum ada peringkat
- 123 342 3 PBDokumen10 halaman123 342 3 PBBidinBelum ada peringkat
- Elektro Kuliah Dasar TeknikDokumen3 halamanElektro Kuliah Dasar TekniknumetalerBelum ada peringkat
- OPTIMALISASI INTEGRALDokumen12 halamanOPTIMALISASI INTEGRALsimileketeBelum ada peringkat