Anda mungkin juga menyukai
- Katalog Ichibot 2019 REV1 HD VersionDokumen1 halamanKatalog Ichibot 2019 REV1 HD VersionIntan Tamira Fa'izah Khusna intantamira.2017100% (1)
- Madah RobotikDokumen6 halamanMadah RobotikAnonymous L8iwYa2o8GBelum ada peringkat
- Panduan ATA-Wheel EduBot FREE PDFDokumen86 halamanPanduan ATA-Wheel EduBot FREE PDFNabil HardiansaBelum ada peringkat
- Robot ArduinoDokumen20 halamanRobot ArduinoImam MukhayatudinBelum ada peringkat
- Modul Belajar Arduino Bersama UTHM 2019Dokumen28 halamanModul Belajar Arduino Bersama UTHM 2019Mazlina Yahya100% (2)
- Laporan Penelitian Rekayasa TeknologiDokumen3 halamanLaporan Penelitian Rekayasa Teknologiasahinaa611Belum ada peringkat
- Proposal Robot AvoiderDokumen40 halamanProposal Robot Avoiderjimmy97Belum ada peringkat
- Buku-Mikrokontroler Menggunakan PIC PDFDokumen53 halamanBuku-Mikrokontroler Menggunakan PIC PDFelanabaskra100% (2)
- Ichibot Ver 1.0Dokumen20 halamanIchibot Ver 1.0UbayrazorBelum ada peringkat
- Laporan Tugas Akhir RobotikDokumen19 halamanLaporan Tugas Akhir RobotikIam IbrahimBelum ada peringkat
- Trainer Book ATMega16Dokumen64 halamanTrainer Book ATMega16rnepology100% (5)
- Deb4033 Robotik Week 3Dokumen17 halamanDeb4033 Robotik Week 3NanaBelum ada peringkat
- PANDUAN ALAT PAMERAN TEKNOLOGIDokumen30 halamanPANDUAN ALAT PAMERAN TEKNOLOGIRini AnggrainiBelum ada peringkat
- LAPORAN ROBOT MANIPULATORDokumen20 halamanLAPORAN ROBOT MANIPULATORAlfina MustafaBelum ada peringkat
- Komponen Utama Dalam Robot (Basci Training)Dokumen16 halamanKomponen Utama Dalam Robot (Basci Training)Ponco MoralistianBelum ada peringkat
- Membuat Robot AvoiderDokumen14 halamanMembuat Robot AvoiderHabi Angga TBelum ada peringkat
- Diterjemahkan dari bahasa Inggris ke bahasa IndonesiaDokumen35 halamanDiterjemahkan dari bahasa Inggris ke bahasa IndonesiaVendiko RizkyBelum ada peringkat
- Eksekusi Instruksi, I, O Memory, Port, EEPROMDokumen11 halamanEksekusi Instruksi, I, O Memory, Port, EEPROMUmi KholifahBelum ada peringkat
- Perekayasaan Sistem Robotik 1.1bDokumen20 halamanPerekayasaan Sistem Robotik 1.1bBenny Ikhwanudin M100% (1)
- Avr Atmega BascomDokumen34 halamanAvr Atmega BascomJoko Vlog SupriyantoBelum ada peringkat
- Laporan Praktikum Sistem Robotik Xii MekaDokumen6 halamanLaporan Praktikum Sistem Robotik Xii MekaNobunaga OdaBelum ada peringkat
- Apa RobotDokumen14 halamanApa Robotzamani1506Belum ada peringkat
- 4 Langkah Mudah Untuk Bisa Membuat Robot Sederhana Tanpa PemogramanDokumen13 halaman4 Langkah Mudah Untuk Bisa Membuat Robot Sederhana Tanpa PemogramanabcsoulmateBelum ada peringkat
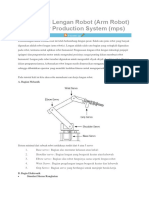
- Memahami Lengan RobotDokumen11 halamanMemahami Lengan RobotRikoHarsoyoBelum ada peringkat
- PembelajaranRobotikaDokumen13 halamanPembelajaranRobotikaHidayah ApriadiBelum ada peringkat
- Z80 IDEDokumen14 halamanZ80 IDEAlfin HernawanBelum ada peringkat
- Myrobo School of Robotics - 1Dokumen37 halamanMyrobo School of Robotics - 1AIvaro danadyaksaBelum ada peringkat
- BAB II - DikonversiDokumen14 halamanBAB II - DikonversiG4dang EnengsBelum ada peringkat
- Tutorial Menyolder Ichibot Pro Dan UltimateDokumen14 halamanTutorial Menyolder Ichibot Pro Dan UltimatefhzanggaBelum ada peringkat
- Proposal Itdel Krpaiberkaki UlubalangDokumen16 halamanProposal Itdel Krpaiberkaki UlubalanghilmanBelum ada peringkat
- untuk Laporan Teknik Kendali DigitalDokumen20 halamanuntuk Laporan Teknik Kendali DigitalABelum ada peringkat
- Pengertian Robot Line FollowerDokumen12 halamanPengertian Robot Line Followerelga mariatiBelum ada peringkat
- MikrokontrolerDokumen5 halamanMikrokontrolerandre virgi hadyBelum ada peringkat
- Makalah Mikroprosesor - Jam DigitalDokumen22 halamanMakalah Mikroprosesor - Jam DigitalLe LyBelum ada peringkat
- Unit I-O Sistem MikroprosesorDokumen38 halamanUnit I-O Sistem MikroprosesorShanche CeloBelum ada peringkat
- Mikroprosesor Zilog Z80Dokumen43 halamanMikroprosesor Zilog Z80Setio WagiyantoBelum ada peringkat
- Jurnal Robot AvoiderDokumen8 halamanJurnal Robot Avoiderroniafrizal01Belum ada peringkat
- Makalah Zilog Z80 RickyDokumen43 halamanMakalah Zilog Z80 RickyRickyBelum ada peringkat
- LED BERKEDIPDokumen98 halamanLED BERKEDIPIstyBelum ada peringkat
- Laporan MikrokontrolerDokumen25 halamanLaporan MikrokontrolerLhiLy ThiitaBelum ada peringkat
- Diebold Upper CompDokumen7 halamanDiebold Upper Compolen andriBelum ada peringkat
- MANUAL BOOK Robot Abb 1410Dokumen16 halamanMANUAL BOOK Robot Abb 1410Yusuf Couah JuaghanBelum ada peringkat
- Laporan Lengkap Digital OutputDokumen30 halamanLaporan Lengkap Digital OutputMUHAMMAD ASNAN HABIBBelum ada peringkat
- SISTEM MEKATRONIK PADA ROBOTDokumen12 halamanSISTEM MEKATRONIK PADA ROBOTaksanul amalBelum ada peringkat
- Sistem Cerdas Jobsheet 1 Pengfenalan Robot Line FollowerDokumen7 halamanSistem Cerdas Jobsheet 1 Pengfenalan Robot Line FollowerLilac GremoreBelum ada peringkat
- Arduino Line FollowerDokumen18 halamanArduino Line FollowerPandi Indra KurniaBelum ada peringkat
- ATMega8 Teori DasarDokumen18 halamanATMega8 Teori DasarRudi HartonoBelum ada peringkat
- Tugas Ar1 Kelompok-Robotino1Dokumen12 halamanTugas Ar1 Kelompok-Robotino1Misbah MyreBelum ada peringkat
- Perangkat Masukan Dan Keluaran ArduinoDokumen56 halamanPerangkat Masukan Dan Keluaran ArduinoIndahAzizahBelum ada peringkat
- RoboticDokumen21 halamanRobotichanan daniBelum ada peringkat
- Robot Line Follower PDFDokumen7 halamanRobot Line Follower PDFImanuelBelum ada peringkat
- Otomatisasi Pengelasan Menggunakan Arc Welding Robot Otc Daihen Almega Ax - V6Dokumen30 halamanOtomatisasi Pengelasan Menggunakan Arc Welding Robot Otc Daihen Almega Ax - V6Imam SutrisnoBelum ada peringkat
- PengamatDokumen18 halamanPengamatrizkyfqlyrlBelum ada peringkat
- Panduan Cara Menginstall Linux Mint Untuk Pemula Lengkap Dengan GambarDari EverandPanduan Cara Menginstall Linux Mint Untuk Pemula Lengkap Dengan GambarPenilaian: 3 dari 5 bintang3/5 (1)
- Proposal InformatikaDokumen32 halamanProposal Informatikawahyu cristiantoBelum ada peringkat
- Manisha Kamila Laporan Program KMDokumen45 halamanManisha Kamila Laporan Program KMwahyu cristiantoBelum ada peringkat
- SISTEM PENJUALAN SEMBAKODokumen8 halamanSISTEM PENJUALAN SEMBAKOwahyu cristiantoBelum ada peringkat
- KKLP Revisi 1 IvanDokumen9 halamanKKLP Revisi 1 Ivanwahyu cristiantoBelum ada peringkat
- DinamoDokumen9 halamanDinamowahyu cristiantoBelum ada peringkat
- Herry Teguh DKK 2021Dokumen6 halamanHerry Teguh DKK 2021wahyu cristiantoBelum ada peringkat
- Hadikusuma, 2019Dokumen17 halamanHadikusuma, 2019wahyu cristiantoBelum ada peringkat
- Sistem Kendali Suhu Pengeringan Cat KendaraanDokumen69 halamanSistem Kendali Suhu Pengeringan Cat Kendaraanwahyu cristiantoBelum ada peringkat
- Panduan PMW FT 2021Dokumen33 halamanPanduan PMW FT 2021wahyu cristiantoBelum ada peringkat
- Proposal SatiroDokumen22 halamanProposal Satirowahyu cristiantoBelum ada peringkat
- LAPORAN AKHIR WAJA KREASI (Wayang Jawa Kreativitas Budaya Asli)Dokumen52 halamanLAPORAN AKHIR WAJA KREASI (Wayang Jawa Kreativitas Budaya Asli)wahyu cristiantoBelum ada peringkat
- Terjemahan Jesica A DKK, 2019Dokumen6 halamanTerjemahan Jesica A DKK, 2019wahyu cristiantoBelum ada peringkat
- Halwani A, 2013Dokumen41 halamanHalwani A, 2013wahyu cristiantoBelum ada peringkat
- Routing StatisDokumen23 halamanRouting Statiswahyuningastuti_82Belum ada peringkat
- Terjemahan Jesica A DKK, 2019Dokumen6 halamanTerjemahan Jesica A DKK, 2019wahyu cristiantoBelum ada peringkat
- Buku Kewirausahaan Teori Dan Praktek PDFDokumen190 halamanBuku Kewirausahaan Teori Dan Praktek PDFIndra Permana Suwardhy Suradirtjadiningrat57% (7)
- Bab Ii - Purnama Liyurau Amala - Sejarah'14Dokumen31 halamanBab Ii - Purnama Liyurau Amala - Sejarah'14wahyu cristiantoBelum ada peringkat
- Panduan TADokumen59 halamanPanduan TAwahyu cristiantoBelum ada peringkat
- Manajemen Pembelajaran di PesantrenDokumen132 halamanManajemen Pembelajaran di Pesantrenwahyu cristiantoBelum ada peringkat
- Karakter WirausahaDokumen119 halamanKarakter Wirausahawahyu cristiantoBelum ada peringkat
- UAS - TNF - Wahyu Cristianto - 1810501003Dokumen10 halamanUAS - TNF - Wahyu Cristianto - 1810501003wahyu cristiantoBelum ada peringkat
- Sefrizal Eka Putra - Teknik Elektro - Teknologi InovatifDokumen24 halamanSefrizal Eka Putra - Teknik Elektro - Teknologi Inovatifwahyu cristiantoBelum ada peringkat
- Terjemahan Setya Budi A DKK, 2019Dokumen6 halamanTerjemahan Setya Budi A DKK, 2019wahyu cristiantoBelum ada peringkat
- Proposal Kuni PDFDokumen23 halamanProposal Kuni PDFwahyu cristiantoBelum ada peringkat
- 1710 7133 1 PBDokumen8 halaman1710 7133 1 PBHikmatul AmriBelum ada peringkat
- Tugas Siskom - Wahyu Cristianto - 1810501003Dokumen2 halamanTugas Siskom - Wahyu Cristianto - 1810501003wahyu cristiantoBelum ada peringkat
- Power Emulator RapiDokumen13 halamanPower Emulator Rapiwahyu cristiantoBelum ada peringkat
- Tugas - TNF - Wahyu Cristianto - 1810501003Dokumen2 halamanTugas - TNF - Wahyu Cristianto - 1810501003wahyu cristiantoBelum ada peringkat
- LaporanAkhir - Etika Profesi - Wahyu Cristianto - 1810501003 PDFDokumen7 halamanLaporanAkhir - Etika Profesi - Wahyu Cristianto - 1810501003 PDFwahyu cristiantoBelum ada peringkat