Anda mungkin juga menyukai
- Matematika Teknik I: Koordinat Kartesius, Polar, Tabung Dan BolaDokumen46 halamanMatematika Teknik I: Koordinat Kartesius, Polar, Tabung Dan BolaRiyanny 'Wiwied' PratiwiBelum ada peringkat
- Bentuk Koordinat GeometriDokumen44 halamanBentuk Koordinat Geometrinabila nurul auliaBelum ada peringkat
- Koordinat Kartesius, Koordinat Tabung & Koordinat Bola. Tim Kalkulus IIDokumen44 halamanKoordinat Kartesius, Koordinat Tabung & Koordinat Bola. Tim Kalkulus IIEll HaKim ERdha100% (1)
- Dokumen - Tips - Koordinat Tabung Dan BolaDokumen44 halamanDokumen - Tips - Koordinat Tabung Dan BolaEll HaKim ERdhaBelum ada peringkat
- KOORDINASIDokumen46 halamanKOORDINASIAbu Miftah ArrayyanBelum ada peringkat
- Bentuk Koordinat, Silinder, Dan BolaDokumen44 halamanBentuk Koordinat, Silinder, Dan Bolaarif Nr100% (1)
- Sistem KoordinatDokumen13 halamanSistem KoordinatAswin TamanBelum ada peringkat
- Sistem Koordinat Dalam RuangDokumen5 halamanSistem Koordinat Dalam RuangFarah AdibahBelum ada peringkat
- Koordinat Kartesius, Koordinat Tabung & Koordinat BolaDokumen44 halamanKoordinat Kartesius, Koordinat Tabung & Koordinat BolaNurBelum ada peringkat
- SKS KINEMATIKADokumen25 halamanSKS KINEMATIKAAnnisa RahmanBelum ada peringkat
- Integral Lipat TigaDokumen17 halamanIntegral Lipat TigarinaanantaBelum ada peringkat
- Koordinat TransformasiDokumen12 halamanKoordinat Transformasieka khairunnisaBelum ada peringkat
- 8 Bentuk KoordinatDokumen34 halaman8 Bentuk KoordinatAbiAsykariBelum ada peringkat
- Materi 1. Koordinat PolarDokumen28 halamanMateri 1. Koordinat PolarRezaFahreza100% (1)
- Sistem Koordinat Dalam RuangDokumen12 halamanSistem Koordinat Dalam RuangNur Alifah100% (1)
- KALKULUS IIDokumen20 halamanKALKULUS IIyunitaBelum ada peringkat
- Koordinat PolarDokumen34 halamanKoordinat PolarAarFaizalBelum ada peringkat
- Koordinat PolarDokumen34 halamanKoordinat PolarratuanikveroBelum ada peringkat
- Koordinat PolarDokumen34 halamanKoordinat PolarCikgu Adam YusofBelum ada peringkat
- Tugas Rangkuman Rini Lestari Modul 6,7,8Dokumen11 halamanTugas Rangkuman Rini Lestari Modul 6,7,8Rini Lestari77Belum ada peringkat
- Sistem KoordinatDokumen9 halamanSistem KoordinatgresdyahBelum ada peringkat
- Sistem Koordinat PolarDokumen22 halamanSistem Koordinat Polarmelted gloryBelum ada peringkat
- Koordinat Cartesius dan Vektor dalam Ruang Tiga DimensiDokumen12 halamanKoordinat Cartesius dan Vektor dalam Ruang Tiga Dimensilabisawafdan240Belum ada peringkat
- Integral R3 Pada Koordinat SilindrisDokumen15 halamanIntegral R3 Pada Koordinat SilindrisDaifuku MochiBelum ada peringkat
- Sistem KoordinatDokumen5 halamanSistem KoordinatNursidin100% (4)
- Koordinat Silinder Dan Bol1Dokumen10 halamanKoordinat Silinder Dan Bol1sariBelum ada peringkat
- Modul 7Dokumen9 halamanModul 7zian fikriBelum ada peringkat
- SISTEM KOORDINATDokumen15 halamanSISTEM KOORDINATShelvi HermawanBelum ada peringkat
- Sistem Koordinat Kutub Kelompok 5Dokumen17 halamanSistem Koordinat Kutub Kelompok 5Arta DanaBelum ada peringkat
- Geo MbuhhDokumen9 halamanGeo MbuhhMuhammad Amin AfifudinBelum ada peringkat
- Rangkuman Vektor - 3Dokumen13 halamanRangkuman Vektor - 3NovitaBelum ada peringkat
- Sistem Koordinat VektorDokumen27 halamanSistem Koordinat VektorMuhammad LiftoBelum ada peringkat
- Irisan Dua Lingkaran Sepusat Dengan JariDokumen2 halamanIrisan Dua Lingkaran Sepusat Dengan JariIntan100% (2)
- Koordinat PolarDokumen34 halamanKoordinat PolarMr BrightsideBelum ada peringkat
- Ringkasan Jarak Titik Ke Titik Dan Jarak Titik Ke Garis-Koordinat KutubDokumen41 halamanRingkasan Jarak Titik Ke Titik Dan Jarak Titik Ke Garis-Koordinat KutubDhidhit BondhanBelum ada peringkat
- Bab Ii..Dokumen14 halamanBab Ii..nero beBelum ada peringkat
- Pertemuan 3 Sistem KoordinatDokumen18 halamanPertemuan 3 Sistem KoordinatUperma Kopma UnhasBelum ada peringkat
- 2 Sistem KoordinatDokumen16 halaman2 Sistem Koordinatnur insanaBelum ada peringkat
- Bab I Sistem KoordinatDokumen22 halamanBab I Sistem Koordinatfernanda anindyaBelum ada peringkat
- Materi-1-1 Sistem KoordinatDokumen26 halamanMateri-1-1 Sistem KoordinatInas Widaningrum HapsariBelum ada peringkat
- Sistem KoordinatDokumen6 halamanSistem KoordinatLauria Hajar Ayu KrisnandarBelum ada peringkat
- Bab 2. Relasi Dan FungsiDokumen25 halamanBab 2. Relasi Dan FungsimawarniBelum ada peringkat
- 8 Fungsi Dinilai VektorDokumen39 halaman8 Fungsi Dinilai VektorAdyartama Prananda NugrahaBelum ada peringkat
- Pdgk4406 Kelompok 5 Modul 7Dokumen5 halamanPdgk4406 Kelompok 5 Modul 7Santika RadityatamaBelum ada peringkat
- 8 Fungsi Dinilai VektorDokumen39 halaman8 Fungsi Dinilai VektorAdyartama Prananda NugrahaBelum ada peringkat
- Makalah Gerak Pada Dua Dan Tiga DimensiDokumen75 halamanMakalah Gerak Pada Dua Dan Tiga DimensiJonathan Hutapea100% (3)
- MTK MonaDokumen13 halamanMTK MonaMinarni FacahBelum ada peringkat
- Ling KaranDokumen7 halamanLing KaranDedy SupriadiBelum ada peringkat
- Tangkapan Layar 2024-03-06 Pada 19.07.30Dokumen43 halamanTangkapan Layar 2024-03-06 Pada 19.07.30gk4byst49tBelum ada peringkat
- Sistem KoordinatDokumen7 halamanSistem KoordinatTeowanda PutriBelum ada peringkat
- Tugas 6Dokumen17 halamanTugas 6wolestod1Belum ada peringkat
- KOORDINAT POLARDokumen43 halamanKOORDINAT POLAREva HarianjaBelum ada peringkat
- SistemKoordinatSDDokumen5 halamanSistemKoordinatSDriaBelum ada peringkat
- VektorDokumen6 halamanVektorLucy BerBelum ada peringkat
- Massa dan Momen Inersia pada Koordinat SilinderDokumen3 halamanMassa dan Momen Inersia pada Koordinat SilinderAdi ArifinBelum ada peringkat
- GABUNGANDokumen122 halamanGABUNGANsri dewiBelum ada peringkat
- Koordinat KartesiusDokumen3 halamanKoordinat KartesiusMoh Alwi MuzakkiBelum ada peringkat
- Rehabilitasi DI Uwai PangoanDokumen131 halamanRehabilitasi DI Uwai Pangoanricki 2909Belum ada peringkat
- Berlindung Dari Kejahatan DiriDokumen2 halamanBerlindung Dari Kejahatan Diriricki 2909Belum ada peringkat
- Pengertian NIATDokumen2 halamanPengertian NIATricki 2909Belum ada peringkat
- Galian Batu LunakDokumen4 halamanGalian Batu LunakMiki Sigar100% (3)
- 6 Gambar Jembatan PerkantoranDokumen29 halaman6 Gambar Jembatan Perkantoranricki 2909Belum ada peringkat
- Surat PenawaranDokumen1 halamanSurat Penawaranricki 2909Belum ada peringkat
- Peta Lokasi Batching Plant 3.5KM ke PekerjaanDokumen1 halamanPeta Lokasi Batching Plant 3.5KM ke Pekerjaanricki 2909Belum ada peringkat
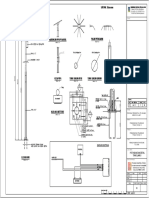
- 53-55-T Lampu-55-Detail Tiang LampuDokumen1 halaman53-55-T Lampu-55-Detail Tiang Lampuricki 2909Belum ada peringkat
- Malah Farhan SC RevDokumen10 halamanMalah Farhan SC Revricki 2909Belum ada peringkat
- k3 Ataknas DonnyDokumen5 halamank3 Ataknas Donnyricki 2909Belum ada peringkat
- 1.surat PPKDokumen1 halaman1.surat PPKricki 2909Belum ada peringkat
- Estimasi Biaya Ruang SholatDokumen3 halamanEstimasi Biaya Ruang Sholatricki 2909Belum ada peringkat
- Undangan Klarifikasi Harga Nada PratamaDokumen2 halamanUndangan Klarifikasi Harga Nada Pratamaricki 2909Belum ada peringkat
- Gambar Jembatan Gantung Sei. Batang Lubuh Pada Ruas Jalan Langgar Payung - Aek MartuaDokumen43 halamanGambar Jembatan Gantung Sei. Batang Lubuh Pada Ruas Jalan Langgar Payung - Aek Martuaricki 2909Belum ada peringkat
- Harga Material Nada PratamaDokumen1 halamanHarga Material Nada Pratamaricki 2909Belum ada peringkat
- Hasil Pengujian BesiDokumen7 halamanHasil Pengujian Besiricki 2909Belum ada peringkat
- Harga Kawat BronjongDokumen1 halamanHarga Kawat Bronjongricki 2909Belum ada peringkat
- Curicullum VitaeDokumen1 halamanCuricullum Vitaericki 2909Belum ada peringkat
- PONDASI IradiatorDokumen21 halamanPONDASI IradiatorSyibral malasyiBelum ada peringkat
- Manusia Purba ChinaDokumen4 halamanManusia Purba Chinaricki 2909Belum ada peringkat
- Anggaran Dasar UpjaDokumen7 halamanAnggaran Dasar Upjaricki 2909Belum ada peringkat
- Muthala'Ah 10 OnlineDokumen2 halamanMuthala'Ah 10 Onlinericki 2909Belum ada peringkat
- Agregat Klas A B S CTB CTSBDokumen77 halamanAgregat Klas A B S CTB CTSBHenry Dwi PuteraBelum ada peringkat
- Cover LAP MINGGUANDokumen5 halamanCover LAP MINGGUANricki 2909Belum ada peringkat
- Tugas Tahfidz 10Dokumen1 halamanTugas Tahfidz 10ricki 2909Belum ada peringkat
- Daftar HadirDokumen1 halamanDaftar Hadirricki 2909Belum ada peringkat
- Faktur LimperDokumen3 halamanFaktur Limperricki 2909Belum ada peringkat
- Faktur LimperDokumen1 halamanFaktur Limperricki 2909Belum ada peringkat
- Cover Laporan TeknisDokumen1 halamanCover Laporan Teknisricki 2909Belum ada peringkat
- AD ART Srikandi TangguhDokumen12 halamanAD ART Srikandi Tangguhricki 2909Belum ada peringkat