Anda mungkin juga menyukai
- OPTIMASI PWMDokumen21 halamanOPTIMASI PWMAriPermanaBelum ada peringkat
- High Tension TransformerDokumen17 halamanHigh Tension TransformerHalisa OktarinaBelum ada peringkat
- KENDALI PID MOTOR DCDokumen9 halamanKENDALI PID MOTOR DCBilly Rian SiregarBelum ada peringkat
- Aktuator FixDokumen6 halamanAktuator FixRadix AdityaBelum ada peringkat
- Laporan Pendahuluan Vii Adc ConverterDokumen6 halamanLaporan Pendahuluan Vii Adc ConverterAgung DrajatBelum ada peringkat
- 6.teknik Pesawat Condenser DischargeDokumen27 halaman6.teknik Pesawat Condenser DischargeIka PuspitasariBelum ada peringkat
- SUHU-SENSORDokumen44 halamanSUHU-SENSORyogaBelum ada peringkat
- Praktikum II Filter RLDokumen6 halamanPraktikum II Filter RLReda RedzBelum ada peringkat
- PH Meter RutDokumen3 halamanPH Meter Rut08teBelum ada peringkat
- Soal Uts Elektronika DayaDokumen1 halamanSoal Uts Elektronika DayaRizky Budiman IskandarBelum ada peringkat
- Sejarah Teknik Elektro MedikDokumen3 halamanSejarah Teknik Elektro MedikPanji DayatBelum ada peringkat
- Audiometri Alat Penting Diagnosa Gangguan PendengaranDokumen10 halamanAudiometri Alat Penting Diagnosa Gangguan PendengaranYuyun Azizah KudadiriBelum ada peringkat
- Pengujian DimmerDokumen9 halamanPengujian DimmerRizalBelum ada peringkat
- Laporan Praktikum Detektor Penyilang NolDokumen5 halamanLaporan Praktikum Detektor Penyilang NolLita KusumaBelum ada peringkat
- 3B39 - Dini Istiqomah - Tugas Pra - TR IntegratorDokumen6 halaman3B39 - Dini Istiqomah - Tugas Pra - TR IntegratorMeilly AistriadewiBelum ada peringkat
- MAKALAH InfuppDokumen9 halamanMAKALAH InfuppRahma DiahBelum ada peringkat
- Thermal Overload Relay (TOR)Dokumen6 halamanThermal Overload Relay (TOR)diki sudharmono100% (1)
- Sensor MPX5500DDokumen5 halamanSensor MPX5500Dparida sibaraniBelum ada peringkat
- Spesifikasi, SOP, Prinsip Kerja AlatDokumen9 halamanSpesifikasi, SOP, Prinsip Kerja AlatHertia rusliBelum ada peringkat
- Diagram BlokDokumen2 halamanDiagram BlokYuliantri Selvi AnugrahniBelum ada peringkat
- Rangkaian Push Button, Relay Dan LampuDokumen15 halamanRangkaian Push Button, Relay Dan LampuAlcham AndrianBelum ada peringkat
- Laporan Terapi Elektrostimulator SiskaDokumen19 halamanLaporan Terapi Elektrostimulator Siskasiska100% (1)
- Band Reject Filter Atau Disebut Juga Sebagai Band Stop Filter Adalah Rangkaian Elektronika Yang Berfungsi Untuk Menahan Sinyal Dengan Range Frekuensi Diatas Frekuensi Batas BawahDokumen2 halamanBand Reject Filter Atau Disebut Juga Sebagai Band Stop Filter Adalah Rangkaian Elektronika Yang Berfungsi Untuk Menahan Sinyal Dengan Range Frekuensi Diatas Frekuensi Batas BawahYuda Zeta50% (2)
- Kelompok 6 - Sensor Hujan ArduinoDokumen7 halamanKelompok 6 - Sensor Hujan ArduinoRiandy WiriadinataBelum ada peringkat
- ANASTESIA UNIT+VENTILATORDokumen13 halamanANASTESIA UNIT+VENTILATORAfifah Nurul JannahBelum ada peringkat
- VAPORIZER: Obat Bius Penting dalam AnastesiDokumen12 halamanVAPORIZER: Obat Bius Penting dalam AnastesitatmainnahainunhaqBelum ada peringkat
- OPTIMASI CCTVDokumen75 halamanOPTIMASI CCTVRyan RmdhnBelum ada peringkat
- OPTIMIZED TENS DEVICE TITLEDokumen18 halamanOPTIMIZED TENS DEVICE TITLEAmier ChancadBelum ada peringkat
- SENSOR THERMALDokumen25 halamanSENSOR THERMALAnnisa Salsabillah100% (1)
- BAB III EKG FixDokumen7 halamanBAB III EKG FixFaris HadyanBelum ada peringkat
- Makalah EsuDokumen17 halamanMakalah EsuMuhamadIlhamBelum ada peringkat
- BLOK DIAGRAMDokumen11 halamanBLOK DIAGRAMDicktusBelum ada peringkat
- KELOMPOK 8 Simulator X RayDokumen21 halamanKELOMPOK 8 Simulator X RayLizLizaBelum ada peringkat
- Pesawat Rontgen Condensator DischargeDokumen10 halamanPesawat Rontgen Condensator DischargeRyan RmdhnBelum ada peringkat
- Mikroskop LaboratoriumDokumen16 halamanMikroskop LaboratoriumshellavidyaBelum ada peringkat
- Dyah Ayu DamayantiDokumen10 halamanDyah Ayu DamayantiDyah Ayu DamayantiBelum ada peringkat
- Rancang Bangun Alat Ukur Kadar Haemoglobin, Kadar Glukosa Dan Kandungan Oksigen Dalam Darah Manusia Secara Non-Invasive Dilengkapi Tensi Meter Digital Dan Pengukur Suhu TubuhDokumen14 halamanRancang Bangun Alat Ukur Kadar Haemoglobin, Kadar Glukosa Dan Kandungan Oksigen Dalam Darah Manusia Secara Non-Invasive Dilengkapi Tensi Meter Digital Dan Pengukur Suhu TubuhItaa Siaput100% (1)
- Tugas Mid Pak AliDokumen16 halamanTugas Mid Pak AliHasni AsniBelum ada peringkat
- PKL CoyDokumen2 halamanPKL CoyWidhiatmoko SangjendralBelum ada peringkat
- MENGOPERASIKAN MOTOR 3 FASE DENGAN DOLDokumen10 halamanMENGOPERASIKAN MOTOR 3 FASE DENGAN DOLAgustinaSholihatiBelum ada peringkat
- Makalah WSD AtemDokumen25 halamanMakalah WSD AtemAhmad RizkiBelum ada peringkat
- Penguat Non InvertingDokumen6 halamanPenguat Non InvertingArrr rrBelum ada peringkat
- RADIOLOGI DASARDokumen63 halamanRADIOLOGI DASARNahid LulBelum ada peringkat
- ElektrostimulatorDokumen12 halamanElektrostimulatorNoor FajrinBelum ada peringkat
- ARSITEKTUR SINYALDokumen12 halamanARSITEKTUR SINYALMeilisa Me'iBelum ada peringkat
- Blok Diagram Timbangan Analitik DigitalDokumen1 halamanBlok Diagram Timbangan Analitik DigitalAtaf AmirBelum ada peringkat
- Kelompok 2Dokumen21 halamanKelompok 2Alfi AlqodriBelum ada peringkat
- Unit 5Dokumen15 halamanUnit 5Q Ajie FaturachmanBelum ada peringkat
- Soal UKOM TemDokumen43 halamanSoal UKOM TemPuji SupriyantoBelum ada peringkat
- DETEKSI DARAH INFUSDokumen37 halamanDETEKSI DARAH INFUSSaid putraBelum ada peringkat
- Laporan EsuDokumen8 halamanLaporan Esuaisha humaira100% (1)
- Tugas KalibrasiDokumen18 halamanTugas KalibrasiYus MayaBelum ada peringkat
- User Manual Usg Ecomed Vertu3Dokumen12 halamanUser Manual Usg Ecomed Vertu3dudnBelum ada peringkat
- Peralatan Life Support Dan Life Saving LanjutDokumen9 halamanPeralatan Life Support Dan Life Saving Lanjutrubi sandyBelum ada peringkat
- Kendali Posisi Motor DCDokumen8 halamanKendali Posisi Motor DCyos_samudraBelum ada peringkat
- Laporan Patient MonitorDokumen8 halamanLaporan Patient MonitorGaluh SandiBelum ada peringkat
- Perbedaan Motor DCDokumen4 halamanPerbedaan Motor DCilham_tkj100% (1)
- Tugas Mata Kuliah RobotikaDokumen19 halamanTugas Mata Kuliah RobotikavhendrayawanBelum ada peringkat
- Motor DC ServoDokumen3 halamanMotor DC ServoiboysBelum ada peringkat
- LAPORAN PRAKTIKUM Motor ServoDokumen6 halamanLAPORAN PRAKTIKUM Motor ServoYoga Adi Candra100% (1)
- 1-1 Workshop Pedoman Penggunaan SDT Dan ADT TragiDokumen62 halaman1-1 Workshop Pedoman Penggunaan SDT Dan ADT Tragisandi anugrahaBelum ada peringkat
- 2-3 Workshop Updating Acuan Gardu Induk - SASDokumen15 halaman2-3 Workshop Updating Acuan Gardu Induk - SASsandi anugrahaBelum ada peringkat
- 1-2 Workshop SDT Pembangunan TragiDokumen28 halaman1-2 Workshop SDT Pembangunan Tragisandi anugrahaBelum ada peringkat
- Jaminan DilaDokumen5 halamanJaminan Dilasandi anugrahaBelum ada peringkat
- Komisioning Gi Dan TrafoDokumen36 halamanKomisioning Gi Dan TrafoAntonius Wisnu Hartono100% (1)
- Biling Rate Ikindo 2019Dokumen33 halamanBiling Rate Ikindo 2019Herupurnamasidiq100% (8)
- BAB VI SSUK (Pink) PDFDokumen85 halamanBAB VI SSUK (Pink) PDFsandi anugrahaBelum ada peringkat
- Bab IDokumen4 halamanBab IAndi TenriBelum ada peringkat
- Pedoman Standar Imbalan Jasa Penilai Tahun 2017Dokumen26 halamanPedoman Standar Imbalan Jasa Penilai Tahun 2017sandi anugraha100% (3)
- DP Pengadaan Langsung JK - Konstruksi - RahfanDokumen60 halamanDP Pengadaan Langsung JK - Konstruksi - RahfanAlie NHBelum ada peringkat
- Kontrak DasarDokumen75 halamanKontrak Dasarsandi anugrahaBelum ada peringkat
- Tugas StandarisasiDokumen10 halamanTugas Standarisasisandi anugrahaBelum ada peringkat
- In Accordance With The Relevant Provisions of The Loan Agreement Under ReferenceDokumen1 halamanIn Accordance With The Relevant Provisions of The Loan Agreement Under Referencesandi anugrahaBelum ada peringkat
- SSKK-KONTRAKDokumen12 halamanSSKK-KONTRAKsandi anugrahaBelum ada peringkat
- LilitanDokumen4 halamanLilitansandi anugrahaBelum ada peringkat
- Hps Jasa KonsultanDokumen10 halamanHps Jasa Konsultansigit_m451112Belum ada peringkat
- Dokumen PenawaranDokumen3 halamanDokumen Penawaransandi anugrahaBelum ada peringkat
- Tugas StandarisasiDokumen10 halamanTugas Standarisasisandi anugrahaBelum ada peringkat
- Menteri BUMN: Pedoman Pengadaan Barang dan Jasa BUMNDokumen17 halamanMenteri BUMN: Pedoman Pengadaan Barang dan Jasa BUMNRizki Puji FadillahBelum ada peringkat
- Survey Mariott Dan AdimuliaDokumen5 halamanSurvey Mariott Dan Adimuliasandi anugrahaBelum ada peringkat
- PERDIR Pengadaan Barang Jasa 0164.P - 2019 PDFDokumen118 halamanPERDIR Pengadaan Barang Jasa 0164.P - 2019 PDFsandi anugrahaBelum ada peringkat
- Kelengkapan ND PengadaanDokumen5 halamanKelengkapan ND Pengadaansandi anugrahaBelum ada peringkat
- Evaluasi Akhir Semester Metoda Quantitative - Faozisokhi Laia (87007025)Dokumen15 halamanEvaluasi Akhir Semester Metoda Quantitative - Faozisokhi Laia (87007025)sandi anugrahaBelum ada peringkat
- Billing-Rate-Konsultan 20091008141045 2178 0 PDFDokumen4 halamanBilling-Rate-Konsultan 20091008141045 2178 0 PDFchris_124005Belum ada peringkat
- Pemasangan Interchange Antara Coal Yard 1Dokumen1 halamanPemasangan Interchange Antara Coal Yard 1sandi anugrahaBelum ada peringkat
- Lembar Persetujuan SEMINAR FinaleDokumen2 halamanLembar Persetujuan SEMINAR Finalesandi anugrahaBelum ada peringkat
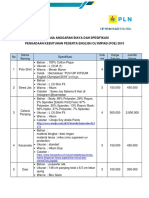
- Rencana Anggaran Biaya Dan Spesifikasi Pengadaan Kebutuhan Peserta English Olympiad (Poe) 2019Dokumen3 halamanRencana Anggaran Biaya Dan Spesifikasi Pengadaan Kebutuhan Peserta English Olympiad (Poe) 2019sandi anugrahaBelum ada peringkat
- In Accordance With The Relevant Provisions of The Loan Agreement Under ReferenceDokumen1 halamanIn Accordance With The Relevant Provisions of The Loan Agreement Under Referencesandi anugrahaBelum ada peringkat
- Rencana Anggaran Biaya Dan Spesifikasi Pengadaan Kebutuhan Peserta English Olympiad (Poe) 2019Dokumen3 halamanRencana Anggaran Biaya Dan Spesifikasi Pengadaan Kebutuhan Peserta English Olympiad (Poe) 2019sandi anugrahaBelum ada peringkat
- Syarat Adtek Buat AbbDokumen3 halamanSyarat Adtek Buat Abbsandi anugrahaBelum ada peringkat