Anda mungkin juga menyukai
- Laporan Praktikum Sitem PengaturanDokumen36 halamanLaporan Praktikum Sitem PengaturanGaluh HBelum ada peringkat
- Mesin CukurDokumen16 halamanMesin CukurAhmad RifqiBelum ada peringkat
- Sistem ScadaDokumen26 halamanSistem Scadafarikha himawatiBelum ada peringkat
- Soal No 31-40Dokumen2 halamanSoal No 31-40Agus Susanto100% (1)
- Tanggapan Frekuensi Diagram BodeDokumen11 halamanTanggapan Frekuensi Diagram BodeDarwis Abdul RohmanBelum ada peringkat
- Otomasi Sistem TenagaDokumen10 halamanOtomasi Sistem TenagaAsep SopyanBelum ada peringkat
- Materi Diklat PLC HmiDokumen18 halamanMateri Diklat PLC Hmitinolesmana6824Belum ada peringkat
- Panduan E-Bike Viar POWER POINT..OKDokumen44 halamanPanduan E-Bike Viar POWER POINT..OKRama MamethBelum ada peringkat
- PRAKTEK OTOMASI INDUSTRI Proses Milling PDFDokumen39 halamanPRAKTEK OTOMASI INDUSTRI Proses Milling PDFBudi TrenggonoBelum ada peringkat
- Buku PLC Handy Wicaksono - Graha IlmuDokumen68 halamanBuku PLC Handy Wicaksono - Graha IlmuIrfan Aziz AffandiBelum ada peringkat
- Koneksi Perangkat IotDokumen17 halamanKoneksi Perangkat Iotprangki pani padilaBelum ada peringkat
- Lapres P3 - Filza Adha Adelina - 02311540000057Dokumen48 halamanLapres P3 - Filza Adha Adelina - 02311540000057Filza Ad'ha AdelinaBelum ada peringkat
- Manual Book NewDokumen11 halamanManual Book NewHicary PycBelum ada peringkat
- Proposal KewirausahaanDokumen14 halamanProposal Kewirausahaandoni zettaBelum ada peringkat
- Sejarah SCADA DistribusiDokumen5 halamanSejarah SCADA Distribusirodin456Belum ada peringkat
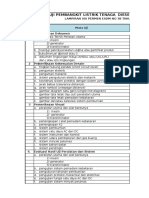
- Mata Uji PLTDDokumen10 halamanMata Uji PLTDAMELIABelum ada peringkat
- P3 - M. Rizal Rizki Hansyah - 02311745000023Dokumen41 halamanP3 - M. Rizal Rizki Hansyah - 02311745000023RizalBelum ada peringkat
- VFD-OPTIMIZEDDokumen8 halamanVFD-OPTIMIZEDagoes diantoroBelum ada peringkat
- Pengantar PLC dan Komponen DasarDokumen26 halamanPengantar PLC dan Komponen DasarRisnandarEriechaCandraBelum ada peringkat
- Remote Station SCADA PrintDokumen37 halamanRemote Station SCADA PrintHarry SaputraBelum ada peringkat
- Temperatur MEASUREMENTDokumen19 halamanTemperatur MEASUREMENTsoetrisno soetrisnoBelum ada peringkat
- Belajar Metode NyquistDokumen19 halamanBelajar Metode NyquistFaizun Ulur RosyadiBelum ada peringkat
- Motor InduksiDokumen28 halamanMotor InduksimimiBelum ada peringkat
- Pengenalan Sistem KontrolDokumen43 halamanPengenalan Sistem KontrolMuhammad Rouf UlinnuhaBelum ada peringkat
- Perancangan Program Sistem Pengendali Untuk Otomatisasi Proses Pengepakan Teh Menggunakan PLC Omron Cp1E Di PT - PN Viii Unit SinumbraDokumen6 halamanPerancangan Program Sistem Pengendali Untuk Otomatisasi Proses Pengepakan Teh Menggunakan PLC Omron Cp1E Di PT - PN Viii Unit SinumbraCindy PutriBelum ada peringkat
- Inverter Volt/Hertz Kontrol Sebagai Pengendali Motor AcDokumen12 halamanInverter Volt/Hertz Kontrol Sebagai Pengendali Motor Acemmanuel agung nugrohoBelum ada peringkat
- BAB 8 Smart GridDokumen14 halamanBAB 8 Smart GridM Noor H SiregarBelum ada peringkat
- RANCANGAN DCS UNTUK INDUSTRIDokumen4 halamanRANCANGAN DCS UNTUK INDUSTRIEko Nugroho PranunggoroBelum ada peringkat
- OPTIMASI PLCDokumen13 halamanOPTIMASI PLCDonny Indra KusumaBelum ada peringkat
- Tugas 1 Sensor, AktuatorDokumen37 halamanTugas 1 Sensor, AktuatorWijarwanto FendyBelum ada peringkat
- Kabel SCADADokumen7 halamanKabel SCADARamadhaniar EkaBelum ada peringkat
- Bismillah Tanoto Candra AdrianDokumen38 halamanBismillah Tanoto Candra AdrianAmmar Syahid RabbaniBelum ada peringkat
- Definisi PLCDokumen4 halamanDefinisi PLCAlifadinugrohoBelum ada peringkat
- untuk Dokumen Tugas Kapita Selekta Materi DCS, HMI, dan SCADADokumen27 halamanuntuk Dokumen Tugas Kapita Selekta Materi DCS, HMI, dan SCADAagung nugrahaBelum ada peringkat
- RANCANG BANGUN PENGENDALI LAMPU DAN PINTU FTTHDokumen93 halamanRANCANG BANGUN PENGENDALI LAMPU DAN PINTU FTTHismalia18Belum ada peringkat
- PLN JATENG ROADMAPDokumen28 halamanPLN JATENG ROADMAPAhmad Syah AljabarBelum ada peringkat
- Rancang Bangun Aplikasi Monitoring KWH Meter Dengan Sensor Arus ACS712 Menggunakan Ubidots IoT PlatformDokumen5 halamanRancang Bangun Aplikasi Monitoring KWH Meter Dengan Sensor Arus ACS712 Menggunakan Ubidots IoT PlatformDaraTantia GiofantiBelum ada peringkat
- 1.sistem KendaliDokumen30 halaman1.sistem KendaliHasbiBelum ada peringkat
- DCS Centum CS 3000 R3 YokogawaDokumen29 halamanDCS Centum CS 3000 R3 YokogawaKarina AnggraeniBelum ada peringkat
- Proposal Skripsi 1 Rachman BagusDokumen22 halamanProposal Skripsi 1 Rachman BagusSatrio PambudiBelum ada peringkat
- K4.1 Bentuk-Bentuk Kanonik 1Dokumen23 halamanK4.1 Bentuk-Bentuk Kanonik 1Gem SahajaBelum ada peringkat
- Perancangan Remote Terminal Unit (Rtu) PadaDokumen7 halamanPerancangan Remote Terminal Unit (Rtu) PadaGilang SeptianBelum ada peringkat
- Monitoring Energi Secara Real-Time Pada Mesin Berbasis IoTDokumen8 halamanMonitoring Energi Secara Real-Time Pada Mesin Berbasis IoTAnugerah Raya PratamaBelum ada peringkat
- 7 Muhammad Hafidz 2015031062 Percobaan 2Dokumen9 halaman7 Muhammad Hafidz 2015031062 Percobaan 2KangmasBelum ada peringkat
- Laporan Mikro 5Dokumen7 halamanLaporan Mikro 5PRAMUDYA RAKHMADYANSYAH SOFYANBelum ada peringkat
- PLCDokumen23 halamanPLCMuhammad AfifuddinBelum ada peringkat
- DESAIN KENDALIDokumen25 halamanDESAIN KENDALIFajri SBelum ada peringkat
- Jurnal Rekayasa Sistem DigitalDokumen10 halamanJurnal Rekayasa Sistem DigitalefebrianjaniBelum ada peringkat
- Pengadaan Lampu PJU dan Paving Jalan Desa BrekatDokumen6 halamanPengadaan Lampu PJU dan Paving Jalan Desa BrekatAn-nurSlawiBelum ada peringkat
- Metode Numerik untuk Gelombang ElektromagnetikDokumen5 halamanMetode Numerik untuk Gelombang ElektromagnetikKhaidirKomalaBelum ada peringkat
- BAB XI - Distributed Control System FundamentalDokumen43 halamanBAB XI - Distributed Control System Fundamentaleman sulaemanBelum ada peringkat
- Pemodelan Dinamik Dan Simulasi Dari Motor Induksi Tiga Fasa Berdaya KecilDokumen5 halamanPemodelan Dinamik Dan Simulasi Dari Motor Induksi Tiga Fasa Berdaya Kecil1jayawardanaBelum ada peringkat
- PLC-ESSAYDokumen3 halamanPLC-ESSAYpajarbarokahBelum ada peringkat
- HMIDokumen10 halamanHMIZakariya AFBelum ada peringkat
- Konsep Hemat Energi Pada Bangunan KampusDokumen10 halamanKonsep Hemat Energi Pada Bangunan KampusRamy Dhia HumamBelum ada peringkat
- MONITORING ATS-AMF BERBASIS IOTDokumen56 halamanMONITORING ATS-AMF BERBASIS IOTFarenndra Adhi100% (1)
- Sitem Komunikasi Data Pada DCSDokumen3 halamanSitem Komunikasi Data Pada DCSntan_jeggekBelum ada peringkat
- Mini Riset Mesin Listrik AcDokumen13 halamanMini Riset Mesin Listrik AcAngga KaristoBelum ada peringkat
- CNC Pemotong Logam 26-08-2020 Rev XXXDokumen9 halamanCNC Pemotong Logam 26-08-2020 Rev XXXMahbub MuazzamBelum ada peringkat
- OTOMASI TEMPEDokumen7 halamanOTOMASI TEMPErahmanandaBelum ada peringkat
- Vaksinasi Dosis 3Dokumen1 halamanVaksinasi Dosis 3Sopyan PermanaBelum ada peringkat
- KHL Group-KKA - Admin01Dokumen2 halamanKHL Group-KKA - Admin01Sopyan PermanaBelum ada peringkat
- Rancang Bangun Mesin Perajang Singkong Untuk Keripik Dengan Satu Pendorong Berbasis BandulDokumen128 halamanRancang Bangun Mesin Perajang Singkong Untuk Keripik Dengan Satu Pendorong Berbasis BandulSopyan PermanaBelum ada peringkat
- Dear Pak IanDokumen1 halamanDear Pak IanSopyan PermanaBelum ada peringkat
- Unjuk Kerja Mesin Perajang Singkong Berbentuk ChipsDokumen9 halamanUnjuk Kerja Mesin Perajang Singkong Berbentuk ChipsSopyan PermanaBelum ada peringkat
- ANALISA PULLEY V-BELT MESIN PENCACAHDokumen7 halamanANALISA PULLEY V-BELT MESIN PENCACAHWan TiaraBelum ada peringkat
- Otomasi Pendorong Singkong Pada Mesin Pemotong Dalam Pembuatan Keripik SingkongDokumen4 halamanOtomasi Pendorong Singkong Pada Mesin Pemotong Dalam Pembuatan Keripik SingkongSopyan PermanaBelum ada peringkat
- Peningkatan Produksi MOCAF Dengan Rancang Bangun AlatDokumen7 halamanPeningkatan Produksi MOCAF Dengan Rancang Bangun AlatSopyan PermanaBelum ada peringkat
- Penggunaan Metode Qulity Fuction Deployement Dalam Menentukan Karakteristik Kebutuhan PenggunaDokumen8 halamanPenggunaan Metode Qulity Fuction Deployement Dalam Menentukan Karakteristik Kebutuhan PenggunaSopyan PermanaBelum ada peringkat
- Pelatihan Penanganan Limbah Batang Singkong Menggunakan Mesin Perajang Batang SingkongDokumen7 halamanPelatihan Penanganan Limbah Batang Singkong Menggunakan Mesin Perajang Batang SingkongSopyan PermanaBelum ada peringkat
- Tugas Pengukuran TeknikDokumen30 halamanTugas Pengukuran TeknikSopyan PermanaBelum ada peringkat
- Peningkatan Produktivitas Keripik Singkong Melalui Alat Perajang Singkong Semiotomatis Di Kelurahan Pakintelan Kota SemarangDokumen4 halamanPeningkatan Produktivitas Keripik Singkong Melalui Alat Perajang Singkong Semiotomatis Di Kelurahan Pakintelan Kota SemarangSopyan PermanaBelum ada peringkat
- Mesin Perajang Singkong Multi PisauDokumen4 halamanMesin Perajang Singkong Multi PisauSopyan PermanaBelum ada peringkat
- Meningkatkan Produksi Keripik SingkongDokumen4 halamanMeningkatkan Produksi Keripik SingkongSopyan PermanaBelum ada peringkat
- 4 Skill Dasar KepemimpinanDokumen5 halaman4 Skill Dasar KepemimpinanSopyan PermanaBelum ada peringkat
- SAND CASTINGDokumen11 halamanSAND CASTINGSopyan PermanaBelum ada peringkat
- Dasar Teknik Tenaga ListrikDokumen31 halamanDasar Teknik Tenaga ListrikKomang YogiBelum ada peringkat
- Proses Pengerjaan EkstrusiDokumen9 halamanProses Pengerjaan EkstrusiSopyan PermanaBelum ada peringkat
- 02-BUKU INFORMASI-Modul 2-Pemeriksaan GensetDokumen19 halaman02-BUKU INFORMASI-Modul 2-Pemeriksaan GensetSopyan Permana100% (1)
- Rancang Bangun Smart Door Lock Menggunakan QR Code Dan SolenoidDokumen6 halamanRancang Bangun Smart Door Lock Menggunakan QR Code Dan SolenoidHalim Nur100% (1)
- LIFT DAN ESKALATORDokumen47 halamanLIFT DAN ESKALATORSopyan PermanaBelum ada peringkat
- B Kata Pengantar Dan Daftar IsiDokumen5 halamanB Kata Pengantar Dan Daftar IsiLailatul Fitri ArianiBelum ada peringkat
- Laporan Praktikum Motor BakarDokumen50 halamanLaporan Praktikum Motor BakarMRudiNurrudinHasanBelum ada peringkat
- Trobleshooting Mesin EfiDokumen22 halamanTrobleshooting Mesin EfiSopyan PermanaBelum ada peringkat