Anda mungkin juga menyukai
- 2 SCADA Distribusi ZDT - 4shareDokumen85 halaman2 SCADA Distribusi ZDT - 4sharegeradakBelum ada peringkat
- Manual Book NewDokumen11 halamanManual Book NewHicary PycBelum ada peringkat
- Makalah Mekatronika PLCDokumen17 halamanMakalah Mekatronika PLCPrilia NandaBelum ada peringkat
- Pemodelan Dengan State SpaceDokumen12 halamanPemodelan Dengan State SpacemaharaniayulestariBelum ada peringkat
- PRAKTEK OTOMASI INDUSTRI Proses Milling PDFDokumen39 halamanPRAKTEK OTOMASI INDUSTRI Proses Milling PDFBudi TrenggonoBelum ada peringkat
- Perancangan Program Sistem Pengendali Untuk Otomatisasi Proses Pengepakan Teh Menggunakan PLC Omron Cp1E Di PT - PN Viii Unit SinumbraDokumen6 halamanPerancangan Program Sistem Pengendali Untuk Otomatisasi Proses Pengepakan Teh Menggunakan PLC Omron Cp1E Di PT - PN Viii Unit SinumbraCindy PutriBelum ada peringkat
- Sistem ScadaDokumen26 halamanSistem Scadafarikha himawatiBelum ada peringkat
- Otomasi Pendorong Singkong Pada Mesin Pemotong Dalam Pembuatan Keripik SingkongDokumen4 halamanOtomasi Pendorong Singkong Pada Mesin Pemotong Dalam Pembuatan Keripik SingkongSopyan PermanaBelum ada peringkat
- VFD-OPTIMIZEDDokumen8 halamanVFD-OPTIMIZEDagoes diantoroBelum ada peringkat
- DCS EngineeringDokumen37 halamanDCS EngineeringAf ThonBelum ada peringkat
- Tanggapan Frekuensi Diagram BodeDokumen11 halamanTanggapan Frekuensi Diagram BodeDarwis Abdul RohmanBelum ada peringkat
- Pengenalan Sistem KontrolDokumen43 halamanPengenalan Sistem KontrolMuhammad Rouf UlinnuhaBelum ada peringkat
- Panduan E-Bike Viar POWER POINT..OKDokumen44 halamanPanduan E-Bike Viar POWER POINT..OKRama MamethBelum ada peringkat
- Pengantar PLC dan Komponen DasarDokumen26 halamanPengantar PLC dan Komponen DasarRisnandarEriechaCandraBelum ada peringkat
- LAPRAKSKPZAIDANDokumen21 halamanLAPRAKSKPZAIDANZaidan Naufal100% (1)
- Laporan LenganRobot Kel 6Dokumen21 halamanLaporan LenganRobot Kel 6Zaidan Naufal100% (1)
- 12 - P3 - Fitriani Diniyah - 02311540000113 PDFDokumen52 halaman12 - P3 - Fitriani Diniyah - 02311540000113 PDFTriaBelum ada peringkat
- Lapres P3 - Filza Adha Adelina - 02311540000057Dokumen48 halamanLapres P3 - Filza Adha Adelina - 02311540000057Filza Ad'ha AdelinaBelum ada peringkat
- Sejarah SCADA DistribusiDokumen5 halamanSejarah SCADA Distribusirodin456Belum ada peringkat
- Proposal KewirausahaanDokumen14 halamanProposal Kewirausahaandoni zettaBelum ada peringkat
- Komponen-Komponen Sistem SCADADokumen3 halamanKomponen-Komponen Sistem SCADAseptianBelum ada peringkat
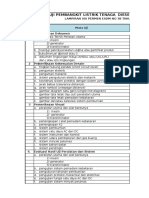
- Mata Uji PLTDDokumen10 halamanMata Uji PLTDAMELIABelum ada peringkat
- Laporan Praktikum Sitem PengaturanDokumen36 halamanLaporan Praktikum Sitem PengaturanGaluh HBelum ada peringkat
- Soal No 31-40Dokumen2 halamanSoal No 31-40Agus Susanto100% (1)
- PENGENDALIAN PROSES-dikonversiDokumen159 halamanPENGENDALIAN PROSES-dikonversiChristian TheovanBelum ada peringkat
- Mesin CukurDokumen16 halamanMesin CukurAhmad RifqiBelum ada peringkat
- Buku PLC Handy Wicaksono - Graha IlmuDokumen68 halamanBuku PLC Handy Wicaksono - Graha IlmuIrfan Aziz AffandiBelum ada peringkat
- Temperatur MEASUREMENTDokumen19 halamanTemperatur MEASUREMENTsoetrisno soetrisnoBelum ada peringkat
- Materi Diklat PLC HmiDokumen18 halamanMateri Diklat PLC Hmitinolesmana6824Belum ada peringkat
- PLC-ESSAYDokumen3 halamanPLC-ESSAYpajarbarokahBelum ada peringkat
- Dasar Inst & Proses Kontrol - BPST XviiDokumen158 halamanDasar Inst & Proses Kontrol - BPST XviiHaryono Rusnosuprapto67% (3)
- Studi Otomasi Dasar Pada Sistem Miniplan PDFDokumen120 halamanStudi Otomasi Dasar Pada Sistem Miniplan PDFtedy_scorpio5891Belum ada peringkat
- Materi 10 - DHT 11Dokumen6 halamanMateri 10 - DHT 11sitiBelum ada peringkat
- Katalog Controller (Mekatronika)Dokumen54 halamanKatalog Controller (Mekatronika)11HAYDAR ALWI TRI WIDODO -Belum ada peringkat
- CARA KERJA PLCDokumen4 halamanCARA KERJA PLCWesnuSnuBelum ada peringkat
- Inovasi Otomasi Industri Masa DepanDokumen36 halamanInovasi Otomasi Industri Masa DepanirfanBelum ada peringkat
- Bentuk Kanonik dan Bentuk Normal BooleanDokumen22 halamanBentuk Kanonik dan Bentuk Normal BooleannanadewBelum ada peringkat
- UTS IoT 2022Dokumen1 halamanUTS IoT 2022Dian AsmarawatiBelum ada peringkat
- SPC Statistical Process ControlDokumen21 halamanSPC Statistical Process ControlHilmia FahmaBelum ada peringkat
- DCS vs PLCDokumen6 halamanDCS vs PLCMuhammad Faisol HaqBelum ada peringkat
- Perancangan Remote Terminal Unit (Rtu) PadaDokumen7 halamanPerancangan Remote Terminal Unit (Rtu) PadaGilang SeptianBelum ada peringkat
- IoT PengembanganDokumen14 halamanIoT PengembanganRayhan KhalidBelum ada peringkat
- DCS Honeywell Experion PKS C200Dokumen9 halamanDCS Honeywell Experion PKS C200Hafidh Eki FauziBelum ada peringkat
- Otomasi Sistem TenagaDokumen10 halamanOtomasi Sistem TenagaAsep SopyanBelum ada peringkat
- MAKALAH WinCCDokumen19 halamanMAKALAH WinCCAria Nurul HaqBelum ada peringkat
- Embedded (Tugas 3)Dokumen11 halamanEmbedded (Tugas 3)Bella mitaya SariBelum ada peringkat
- Level ControlDokumen52 halamanLevel ControlAhmad AliBelum ada peringkat
- Makalah Scada Bayu LT 3aDokumen11 halamanMakalah Scada Bayu LT 3aBay YudhaBelum ada peringkat
- Tugas Merancang PLTMH - Farhan Sianturi (44222204)Dokumen55 halamanTugas Merancang PLTMH - Farhan Sianturi (44222204)m.pangeran adeBelum ada peringkat
- Apa Itu Scada?Dokumen4 halamanApa Itu Scada?Dhesy PakayaBelum ada peringkat
- Laporan Praktikum Sistem Integrasi - Traffic Light Menggunakan PLC Siemens S7-1500Dokumen14 halamanLaporan Praktikum Sistem Integrasi - Traffic Light Menggunakan PLC Siemens S7-1500Hendra SaktiyasaBelum ada peringkat
- Tugas MekatronikaDokumen43 halamanTugas MekatronikaFindi HidayatBelum ada peringkat
- 01 - Siti Sofiya - 02311745000018 - P3Dokumen48 halaman01 - Siti Sofiya - 02311745000018 - P3siti sofiyaBelum ada peringkat
- Laporam Resmi PROGRAMMABLE LOGIC CONTROLLER (PLC)Dokumen31 halamanLaporam Resmi PROGRAMMABLE LOGIC CONTROLLER (PLC)Wahyu Basitho AbdiBelum ada peringkat
- Laporan p2 Kelompok 8Dokumen45 halamanLaporan p2 Kelompok 8Dzh0k4rBelum ada peringkat
- P1 - Giffari Muslih - 02311745000021 - LJDokumen38 halamanP1 - Giffari Muslih - 02311745000021 - LJGiffari MuslihBelum ada peringkat
- Disain Sistem Kendali Dan Monitoring Proses Instalasi Pengolahan Air Limbah Buang Boiler Berbasis PLC Dan HMIDokumen111 halamanDisain Sistem Kendali Dan Monitoring Proses Instalasi Pengolahan Air Limbah Buang Boiler Berbasis PLC Dan HMIangga syamBelum ada peringkat
- BAB I-V - 41417320005 - M.Iqbal - Fariz - Rev01Dokumen53 halamanBAB I-V - 41417320005 - M.Iqbal - Fariz - Rev01Ady MartawijayaBelum ada peringkat
- BAB I Sistem ControlDokumen24 halamanBAB I Sistem ControlImem MembleBelum ada peringkat
- Distributed Control SystemDokumen35 halamanDistributed Control SystemAddinul HakimBelum ada peringkat
- Metode Dan Pengolahan Data EksperimenDokumen14 halamanMetode Dan Pengolahan Data EksperimenRizalBelum ada peringkat
- BAB V LarutanDokumen39 halamanBAB V LarutanRizalBelum ada peringkat
- Tugas MesfluDokumen6 halamanTugas MesfluRizalBelum ada peringkat
- Aplikasi Gelombang Elektromagnetik Di Berbagai BidangDokumen4 halamanAplikasi Gelombang Elektromagnetik Di Berbagai BidangLia NurhasanahBelum ada peringkat
- Tugas MesfluDokumen6 halamanTugas MesfluRizalBelum ada peringkat
- Optimalisasi Pengaturan Tegangan Dengan Algoritma Genetika PDFDokumen6 halamanOptimalisasi Pengaturan Tegangan Dengan Algoritma Genetika PDFBela Mei Sri HandayaniBelum ada peringkat
- Pengertian OtosDokumen3 halamanPengertian OtosRachmad RamadhanBelum ada peringkat
- SifonDokumen19 halamanSifonRizalBelum ada peringkat
- Kappa (Kabin Pengering Padi) BDokumen29 halamanKappa (Kabin Pengering Padi) BRizalBelum ada peringkat
- Doddy Optimasi Ukuran Penampang Rangka Batang Baja.. Vol 25 No.1 NewDokumen12 halamanDoddy Optimasi Ukuran Penampang Rangka Batang Baja.. Vol 25 No.1 NewRizalBelum ada peringkat
- ID Sistem Instrumentasi Alat Ukur Kadar GulDokumen3 halamanID Sistem Instrumentasi Alat Ukur Kadar GulRizalBelum ada peringkat
- Aplikasi CahayaDokumen5 halamanAplikasi CahayaRizalBelum ada peringkat
- DasRefr POLBAN ARL Sem Genap 2012-2013Dokumen89 halamanDasRefr POLBAN ARL Sem Genap 2012-2013RizalBelum ada peringkat
- Lapresakustikp 4 GetaranteredamDokumen36 halamanLapresakustikp 4 GetaranteredamMohammad Haris MBelum ada peringkat
- LAPRES P3 SPO Kelompok 1 LJ 16Dokumen46 halamanLAPRES P3 SPO Kelompok 1 LJ 16RizalBelum ada peringkat
- Laporan Resmi P4 Kelompok 4 RevisiDokumen32 halamanLaporan Resmi P4 Kelompok 4 RevisiRizalBelum ada peringkat
- Garmes 2014Dokumen1 halamanGarmes 2014Rizal RizkiBelum ada peringkat
- M. Rizal Rizki H. (2114039037)Dokumen12 halamanM. Rizal Rizki H. (2114039037)RizalBelum ada peringkat
- LAPORAN RESMI DIO p2Dokumen35 halamanLAPORAN RESMI DIO p2RizalBelum ada peringkat
- Modul P-3 Pemodelan MathcadDokumen8 halamanModul P-3 Pemodelan MathcadRizalBelum ada peringkat
- Toggle Link ClampDokumen12 halamanToggle Link ClampRizalBelum ada peringkat
- LapresDokumen27 halamanLapresRizalBelum ada peringkat
- Lapres P1 - M. Rizal Rizki H - 02311745000023Dokumen33 halamanLapres P1 - M. Rizal Rizki H - 02311745000023RizalBelum ada peringkat
- LapresDokumen27 halamanLapresRizalBelum ada peringkat
- Toggle Link ClampDokumen12 halamanToggle Link ClampRizalBelum ada peringkat